Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTENET: Transformer Encoding Network for Effective Temporal Flow on Motion Prediction
Jun 30, 2022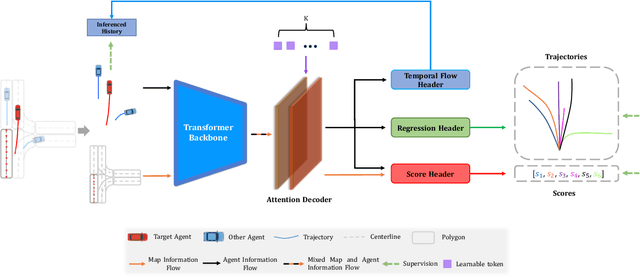

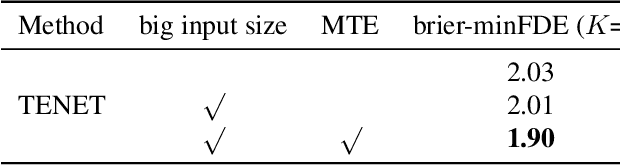
This technical report presents an effective method for motion prediction in autonomous driving. We develop a Transformer-based method for input encoding and trajectory prediction. Besides, we propose the Temporal Flow Header to enhance the trajectory encoding. In the end, an efficient K-means ensemble method is used. Using our Transformer network and ensemble method, we win the first place of Argoverse 2 Motion Forecasting Challenge with the state-of-the-art brier-minFDE score of 1.90.
Via