 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModiff: Action-Conditioned 3D Motion Generation with Denoising Diffusion Probabilistic Models
Jan 10, 2023



Diffusion-based generative models have recently emerged as powerful solutions for high-quality synthesis in multiple domains. Leveraging the bidirectional Markov chains, diffusion probabilistic models generate samples by inferring the reversed Markov chain based on the learned distribution mapping at the forward diffusion process. In this work, we propose Modiff, a conditional paradigm that benefits from the denoising diffusion probabilistic model (DDPM) to tackle the problem of realistic and diverse action-conditioned 3D skeleton-based motion generation. We are a pioneering attempt that uses DDPM to synthesize a variable number of motion sequences conditioned on a categorical action. We evaluate our approach on the large-scale NTU RGB+D dataset and show improvements over state-of-the-art motion generation methods.
Continuous Trajectory Planning Based on Learning Optimization in High Dimensional Input Space for Serial Manipulators
Dec 18, 2018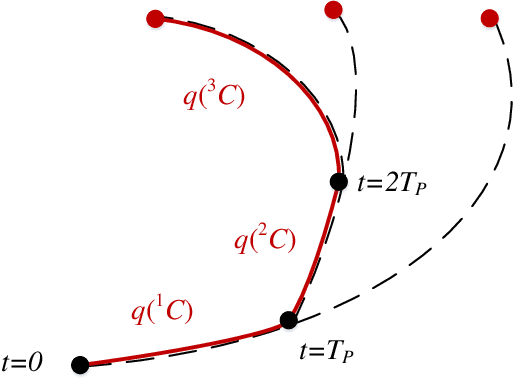
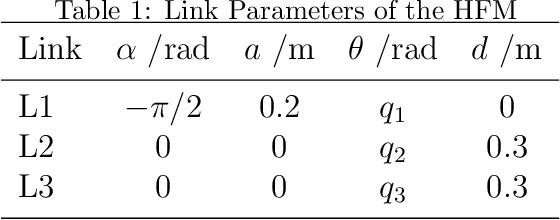
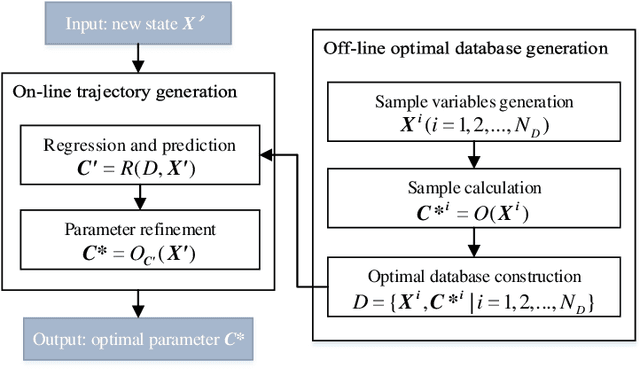

To continuously generate trajectories for serial manipulators with high dimensional degrees of freedom (DOF) in the dynamic environment, a real-time optimal trajectory generation method based on machine learning aiming at high dimensional inputs is presented in this paper. First, a learning optimization (LO) framework is established, and implementations with different sub-methods are discussed. Additionally, multiple criteria are defined to evaluate the performance of LO models. Furthermore, aiming at high dimensional inputs, a database generation method based on input space dimension-reducing mapping is proposed. At last, this method is validated on motion planning for haptic feedback manipulators (HFM) in virtual reality systems. Results show that the input space dimension-reducing method can significantly elevate the efficiency and quality of database generation and consequently improve the performance of the LO. Moreover, using this LO method, real-time trajectory generation with high dimensional inputs can be achieved, which lays a foundation for continuous trajectory planning for high-DOF-robots in complex environments.