 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTraining-Free Representation Guidance for Diffusion Models with a Representation Alignment Projector
Jan 30, 2026Recent progress in generative modeling has enabled high-quality visual synthesis with diffusion-based frameworks, supporting controllable sampling and large-scale training. Inference-time guidance methods such as classifier-free and representative guidance enhance semantic alignment by modifying sampling dynamics; however, they do not fully exploit unsupervised feature representations. Although such visual representations contain rich semantic structure, their integration during generation is constrained by the absence of ground-truth reference images at inference. This work reveals semantic drift in the early denoising stages of diffusion transformers, where stochasticity results in inconsistent alignment even under identical conditioning. To mitigate this issue, we introduce a guidance scheme using a representation alignment projector that injects representations predicted by a projector into intermediate sampling steps, providing an effective semantic anchor without modifying the model architecture. Experiments on SiTs and REPAs show notable improvements in class-conditional ImageNet synthesis, achieving substantially lower FID scores; for example, REPA-XL/2 improves from 5.9 to 3.3, and the proposed method outperforms representative guidance when applied to SiT models. The approach further yields complementary gains when combined with classifier-free guidance, demonstrating enhanced semantic coherence and visual fidelity. These results establish representation-informed diffusion sampling as a practical strategy for reinforcing semantic preservation and image consistency.
Motus: A Unified Latent Action World Model
Dec 15, 2025While a general embodied agent must function as a unified system, current methods are built on isolated models for understanding, world modeling, and control. This fragmentation prevents unifying multimodal generative capabilities and hinders learning from large-scale, heterogeneous data. In this paper, we propose Motus, a unified latent action world model that leverages existing general pretrained models and rich, sharable motion information. Motus introduces a Mixture-of-Transformer (MoT) architecture to integrate three experts (i.e., understanding, video generation, and action) and adopts a UniDiffuser-style scheduler to enable flexible switching between different modeling modes (i.e., world models, vision-language-action models, inverse dynamics models, video generation models, and video-action joint prediction models). Motus further leverages the optical flow to learn latent actions and adopts a recipe with three-phase training pipeline and six-layer data pyramid, thereby extracting pixel-level "delta action" and enabling large-scale action pretraining. Experiments show that Motus achieves superior performance against state-of-the-art methods in both simulation (a +15% improvement over X-VLA and a +45% improvement over Pi0.5) and real-world scenarios(improved by +11~48%), demonstrating unified modeling of all functionalities and priors significantly benefits downstream robotic tasks.
Pre-trained Models Succeed in Medical Imaging with Representation Similarity Degradation
Mar 11, 2025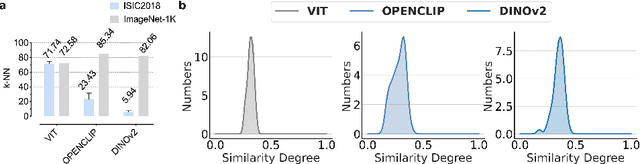
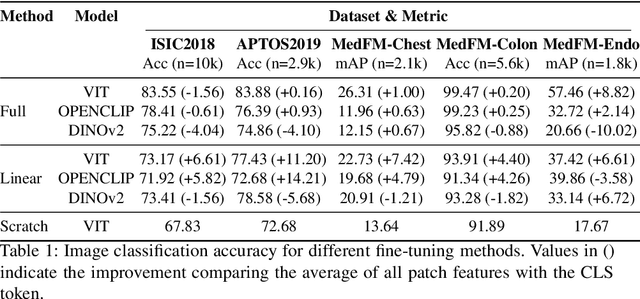
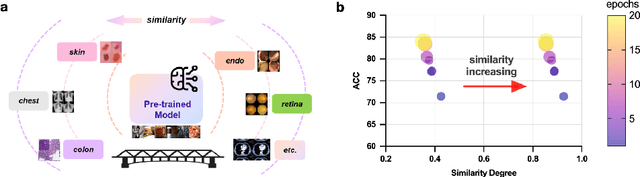
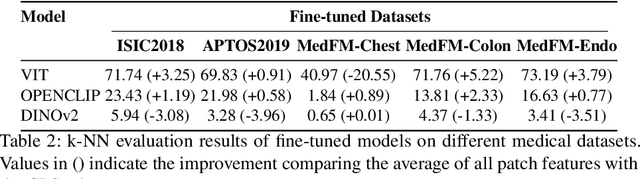
This paper investigates the critical problem of representation similarity evolution during cross-domain transfer learning, with particular focus on understanding why pre-trained models maintain effectiveness when adapted to medical imaging tasks despite significant domain gaps. The study establishes a rigorous problem definition centered on quantifying and analyzing representation similarity trajectories throughout the fine-tuning process, while carefully delineating the scope to encompass both medical image analysis and broader cross-domain adaptation scenarios. Our empirical findings reveal three critical discoveries: the potential existence of high-performance models that preserve both task accuracy and representation similarity to their pre-trained origins; a robust linear correlation between layer-wise similarity metrics and representation quality indicators; and distinct adaptation patterns that differentiate supervised versus self-supervised pre-training paradigms. The proposed similarity space framework not only provides mechanistic insights into knowledge transfer dynamics but also raises fundamental questions about optimal utilization of pre-trained models. These results advance our understanding of neural network adaptation processes while offering practical implications for transfer learning strategies that extend beyond medical imaging applications. The code will be available once accepted.
Keeping Representation Similarity in Finetuning for Medical Image Analysis
Mar 10, 2025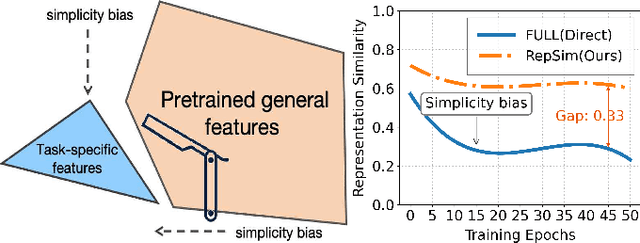
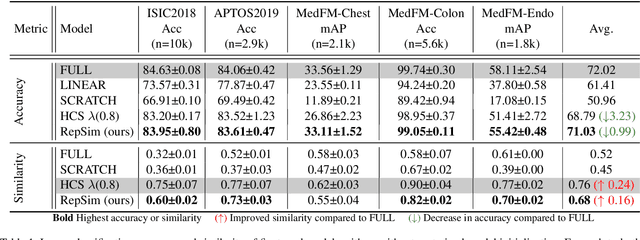
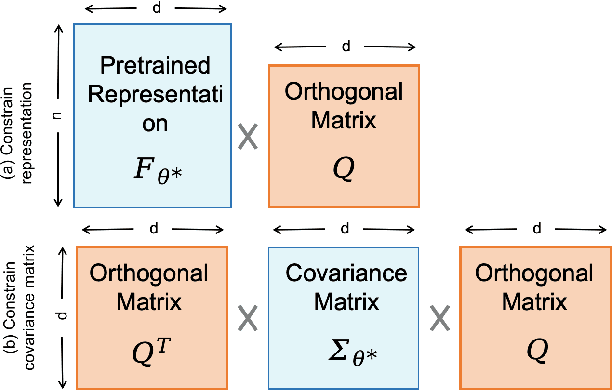
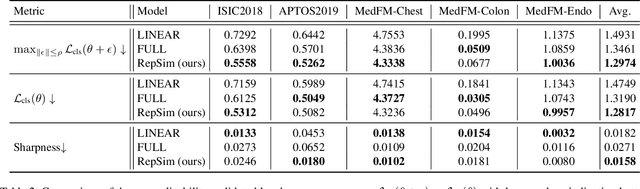
Foundation models pretrained on large-scale natural images have been widely used to adapt to medical image analysis through finetuning. This is largely attributed to pretrained representations capturing universal, robust, and generalizable features, which can be reutilized by downstream tasks. However, these representations are later found to gradually vanish during finetuning, accompanied by a degradation of foundation model's original abilities, e.g., generalizability. In this paper, we argue that pretrained representations can be well preserved while still effectively adapting to downstream tasks. We study this by proposing a new finetuning method RepSim, which minimizes the distance between pretrained and finetuned representations via constraining learnable orthogonal manifold based on similarity invariance. Compared to standard finetuning methods, e.g., full finetuning, our method improves representation similarity by over 30% while maintaining competitive accuracy, and reduces sharpness by 42% across five medical image classification datasets. The code will be released.
A Survey on Image Quality Assessment: Insights, Analysis, and Future Outlook
Feb 12, 2025Image quality assessment (IQA) represents a pivotal challenge in image-focused technologies, significantly influencing the advancement trajectory of image processing and computer vision. Recently, IQA has witnessed a notable surge in innovative research efforts, driven by the emergence of novel architectural paradigms and sophisticated computational techniques. This survey delivers an extensive analysis of contemporary IQA methodologies, organized according to their application scenarios, serving as a beneficial reference for both beginners and experienced researchers. We analyze the advantages and limitations of current approaches and suggest potential future research pathways. The survey encompasses both general and specific IQA methodologies, including conventional statistical measures, machine learning techniques, and cutting-edge deep learning models such as convolutional neural networks (CNNs) and Transformer models. The analysis within this survey highlights the necessity for distortion-specific IQA methods tailored to various application scenarios, emphasizing the significance of practicality, interpretability, and ease of implementation in future developments.
Towards Unifying Understanding and Generation in the Era of Vision Foundation Models: A Survey from the Autoregression Perspective
Oct 29, 2024


Autoregression in large language models (LLMs) has shown impressive scalability by unifying all language tasks into the next token prediction paradigm. Recently, there is a growing interest in extending this success to vision foundation models. In this survey, we review the recent advances and discuss future directions for autoregressive vision foundation models. First, we present the trend for next generation of vision foundation models, i.e., unifying both understanding and generation in vision tasks. We then analyze the limitations of existing vision foundation models, and present a formal definition of autoregression with its advantages. Later, we categorize autoregressive vision foundation models from their vision tokenizers and autoregression backbones. Finally, we discuss several promising research challenges and directions. To the best of our knowledge, this is the first survey to comprehensively summarize autoregressive vision foundation models under the trend of unifying understanding and generation. A collection of related resources is available at https://github.com/EmmaSRH/ARVFM.
Embedded Prompt Tuning: Towards Enhanced Calibration of Pretrained Models for Medical Images
Jul 02, 2024

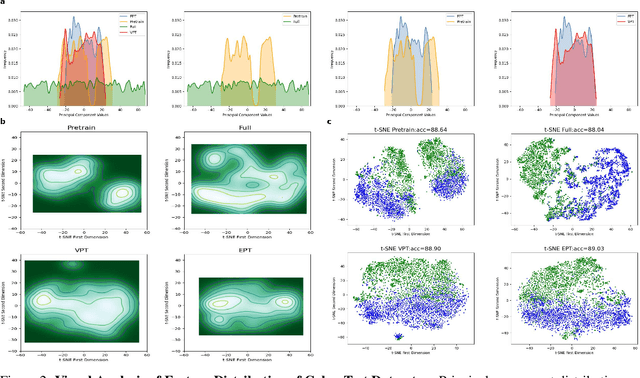

Foundation models pre-trained on large-scale data have been widely witnessed to achieve success in various natural imaging downstream tasks. Parameter-efficient fine-tuning (PEFT) methods aim to adapt foundation models to new domains by updating only a small portion of parameters in order to reduce computational overhead. However, the effectiveness of these PEFT methods, especially in cross-domain few-shot scenarios, e.g., medical image analysis, has not been fully explored. In this work, we facilitate the study of the performance of PEFT when adapting foundation models to medical image classification tasks. Furthermore, to alleviate the limitations of prompt introducing ways and approximation capabilities on Transformer architectures of mainstream prompt tuning methods, we propose the Embedded Prompt Tuning (EPT) method by embedding prompt tokens into the expanded channels. We also find that there are anomalies in the feature space distribution of foundation models during pre-training process, and prompt tuning can help mitigate this negative impact. To explain this phenomenon, we also introduce a novel perspective to understand prompt tuning: Prompt tuning is a distribution calibrator. And we support it by analyzing patch-wise scaling and feature separation operations contained in EPT. Our experiments show that EPT outperforms several state-of-the-art fine-tuning methods by a significant margin on few-shot medical image classification tasks, and completes the fine-tuning process within highly competitive time, indicating EPT is an effective PEFT method. The source code is available at github.com/zuwenqiang/EPT.
FM-OV3D: Foundation Model-based Cross-modal Knowledge Blending for Open-Vocabulary 3D Detection
Dec 22, 2023



The superior performances of pre-trained foundation models in various visual tasks underscore their potential to enhance the 2D models' open-vocabulary ability. Existing methods explore analogous applications in the 3D space. However, most of them only center around knowledge extraction from singular foundation models, which limits the open-vocabulary ability of 3D models. We hypothesize that leveraging complementary pre-trained knowledge from various foundation models can improve knowledge transfer from 2D pre-trained visual language models to the 3D space. In this work, we propose FM-OV3D, a method of Foundation Model-based Cross-modal Knowledge Blending for Open-Vocabulary 3D Detection, which improves the open-vocabulary localization and recognition abilities of 3D model by blending knowledge from multiple pre-trained foundation models, achieving true open-vocabulary without facing constraints from original 3D datasets. Specifically, to learn the open-vocabulary 3D localization ability, we adopt the open-vocabulary localization knowledge of the Grounded-Segment-Anything model. For open-vocabulary 3D recognition ability, We leverage the knowledge of generative foundation models, including GPT-3 and Stable Diffusion models, and cross-modal discriminative models like CLIP. The experimental results on two popular benchmarks for open-vocabulary 3D object detection show that our model efficiently learns knowledge from multiple foundation models to enhance the open-vocabulary ability of the 3D model and successfully achieves state-of-the-art performance in open-vocabulary 3D object detection tasks. Code is released at https://github.com/dmzhang0425/FM-OV3D.git.
Unmasking Transformers: A Theoretical Approach to Data Recovery via Attention Weights
Oct 19, 2023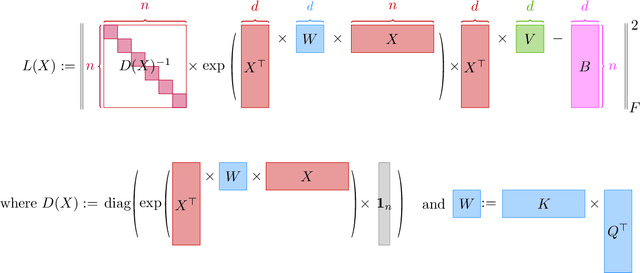
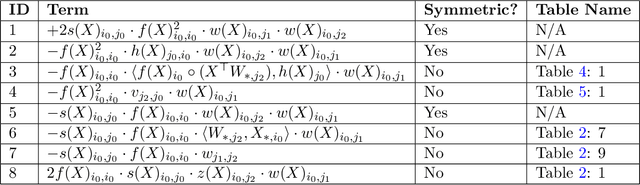
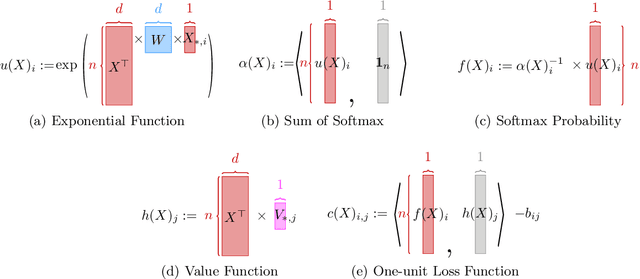
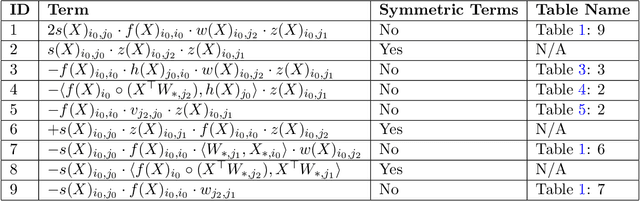
In the realm of deep learning, transformers have emerged as a dominant architecture, particularly in natural language processing tasks. However, with their widespread adoption, concerns regarding the security and privacy of the data processed by these models have arisen. In this paper, we address a pivotal question: Can the data fed into transformers be recovered using their attention weights and outputs? We introduce a theoretical framework to tackle this problem. Specifically, we present an algorithm that aims to recover the input data $X \in \mathbb{R}^{d \times n}$ from given attention weights $W = QK^\top \in \mathbb{R}^{d \times d}$ and output $B \in \mathbb{R}^{n \times n}$ by minimizing the loss function $L(X)$. This loss function captures the discrepancy between the expected output and the actual output of the transformer. Our findings have significant implications for the Localized Layer-wise Mechanism (LLM), suggesting potential vulnerabilities in the model's design from a security and privacy perspective. This work underscores the importance of understanding and safeguarding the internal workings of transformers to ensure the confidentiality of processed data.
PatchBackdoor: Backdoor Attack against Deep Neural Networks without Model Modification
Aug 22, 2023Backdoor attack is a major threat to deep learning systems in safety-critical scenarios, which aims to trigger misbehavior of neural network models under attacker-controlled conditions. However, most backdoor attacks have to modify the neural network models through training with poisoned data and/or direct model editing, which leads to a common but false belief that backdoor attack can be easily avoided by properly protecting the model. In this paper, we show that backdoor attacks can be achieved without any model modification. Instead of injecting backdoor logic into the training data or the model, we propose to place a carefully-designed patch (namely backdoor patch) in front of the camera, which is fed into the model together with the input images. The patch can be trained to behave normally at most of the time, while producing wrong prediction when the input image contains an attacker-controlled trigger object. Our main techniques include an effective training method to generate the backdoor patch and a digital-physical transformation modeling method to enhance the feasibility of the patch in real deployments. Extensive experiments show that PatchBackdoor can be applied to common deep learning models (VGG, MobileNet, ResNet) with an attack success rate of 93% to 99% on classification tasks. Moreover, we implement PatchBackdoor in real-world scenarios and show that the attack is still threatening.