 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperagents
Mar 19, 2026Self-improving AI systems aim to reduce reliance on human engineering by learning to improve their own learning and problem-solving processes. Existing approaches to self-improvement rely on fixed, handcrafted meta-level mechanisms, fundamentally limiting how fast such systems can improve. The Darwin Gödel Machine (DGM) demonstrates open-ended self-improvement in coding by repeatedly generating and evaluating self-modified variants. Because both evaluation and self-modification are coding tasks, gains in coding ability can translate into gains in self-improvement ability. However, this alignment does not generally hold beyond coding domains. We introduce \textbf{hyperagents}, self-referential agents that integrate a task agent (which solves the target task) and a meta agent (which modifies itself and the task agent) into a single editable program. Crucially, the meta-level modification procedure is itself editable, enabling metacognitive self-modification, improving not only the task-solving behavior, but also the mechanism that generates future improvements. We instantiate this framework by extending DGM to create DGM-Hyperagents (DGM-H), eliminating the assumption of domain-specific alignment between task performance and self-modification skill to potentially support self-accelerating progress on any computable task. Across diverse domains, the DGM-H improves performance over time and outperforms baselines without self-improvement or open-ended exploration, as well as prior self-improving systems. Furthermore, the DGM-H improves the process by which it generates new agents (e.g., persistent memory, performance tracking), and these meta-level improvements transfer across domains and accumulate across runs. DGM-Hyperagents offer a glimpse of open-ended AI systems that do not merely search for better solutions, but continually improve their search for how to improve.
Adapting a World Model for Trajectory Following in a 3D Game
Apr 16, 2025



Imitation learning is a powerful tool for training agents by leveraging expert knowledge, and being able to replicate a given trajectory is an integral part of it. In complex environments, like modern 3D video games, distribution shift and stochasticity necessitate robust approaches beyond simple action replay. In this study, we apply Inverse Dynamics Models (IDM) with different encoders and policy heads to trajectory following in a modern 3D video game -- Bleeding Edge. Additionally, we investigate several future alignment strategies that address the distribution shift caused by the aleatoric uncertainty and imperfections of the agent. We measure both the trajectory deviation distance and the first significant deviation point between the reference and the agent's trajectory and show that the optimal configuration depends on the chosen setting. Our results show that in a diverse data setting, a GPT-style policy head with an encoder trained from scratch performs the best, DINOv2 encoder with the GPT-style policy head gives the best results in the low data regime, and both GPT-style and MLP-style policy heads had comparable results when pre-trained on a diverse setting and fine-tuned for a specific behaviour setting.
Scaling Laws for Pre-training Agents and World Models
Nov 07, 2024



The performance of embodied agents has been shown to improve by increasing model parameters, dataset size, and compute. This has been demonstrated in domains from robotics to video games, when generative learning objectives on offline datasets (pre-training) are used to model an agent's behavior (imitation learning) or their environment (world modeling). This paper characterizes the role of scale in these tasks more precisely. Going beyond the simple intuition that `bigger is better', we show that the same types of power laws found in language modeling (e.g. between loss and optimal model size), also arise in world modeling and imitation learning. However, the coefficients of these laws are heavily influenced by the tokenizer, task \& architecture -- this has important implications on the optimal sizing of models and data.
Efficient Offline Reinforcement Learning: The Critic is Critical
Jun 19, 2024Recent work has demonstrated both benefits and limitations from using supervised approaches (without temporal-difference learning) for offline reinforcement learning. While off-policy reinforcement learning provides a promising approach for improving performance beyond supervised approaches, we observe that training is often inefficient and unstable due to temporal difference bootstrapping. In this paper we propose a best-of-both approach by first learning the behavior policy and critic with supervised learning, before improving with off-policy reinforcement learning. Specifically, we demonstrate improved efficiency by pre-training with a supervised Monte-Carlo value-error, making use of commonly neglected downstream information from the provided offline trajectories. We find that we are able to more than halve the training time of the considered offline algorithms on standard benchmarks, and surprisingly also achieve greater stability. We further build on the importance of having consistent policy and value functions to propose novel hybrid algorithms, TD3+BC+CQL and EDAC+BC, that regularize both the actor and the critic towards the behavior policy. This helps to more reliably improve on the behavior policy when learning from limited human demonstrations. Code is available at https://github.com/AdamJelley/EfficientOfflineRL
Aligning Agents like Large Language Models
Jun 06, 2024Training agents to behave as desired in complex 3D environments from high-dimensional sensory information is challenging. Imitation learning from diverse human behavior provides a scalable approach for training an agent with a sensible behavioral prior, but such an agent may not perform the specific behaviors of interest when deployed. To address this issue, we draw an analogy between the undesirable behaviors of imitation learning agents and the unhelpful responses of unaligned large language models (LLMs). We then investigate how the procedure for aligning LLMs can be applied to aligning agents in a 3D environment from pixels. For our analysis, we utilize an academically illustrative part of a modern console game in which the human behavior distribution is multi-modal, but we want our agent to imitate a single mode of this behavior. We demonstrate that we can align our agent to consistently perform the desired mode, while providing insights and advice for successfully applying this approach to training agents. Project webpage at https://adamjelley.github.io/aligning-agents-like-llms .
Visual Encoders for Data-Efficient Imitation Learning in Modern Video Games
Dec 04, 2023Video games have served as useful benchmarks for the decision making community, but going beyond Atari games towards training agents in modern games has been prohibitively expensive for the vast majority of the research community. Recent progress in the research, development and open release of large vision models has the potential to amortize some of these costs across the community. However, it is currently unclear which of these models have learnt representations that retain information critical for sequential decision making. Towards enabling wider participation in the research of gameplaying agents in modern games, we present a systematic study of imitation learning with publicly available visual encoders compared to the typical, task-specific, end-to-end training approach in Minecraft, Minecraft Dungeons and Counter-Strike: Global Offensive.
Adaptive Scaffolding in Block-Based Programming via Synthesizing New Tasks as Pop Quizzes
Mar 28, 2023Block-based programming environments are increasingly used to introduce computing concepts to beginners. However, novice students often struggle in these environments, given the conceptual and open-ended nature of programming tasks. To effectively support a student struggling to solve a given task, it is important to provide adaptive scaffolding that guides the student towards a solution. We introduce a scaffolding framework based on pop quizzes presented as multi-choice programming tasks. To automatically generate these pop quizzes, we propose a novel algorithm, PQuizSyn. More formally, given a reference task with a solution code and the student's current attempt, PQuizSyn synthesizes new tasks for pop quizzes with the following features: (a) Adaptive (i.e., individualized to the student's current attempt), (b) Comprehensible (i.e., easy to comprehend and solve), and (c) Concealing (i.e., do not reveal the solution code). Our algorithm synthesizes these tasks using techniques based on symbolic reasoning and graph-based code representations. We show that our algorithm can generate hundreds of pop quizzes for different student attempts on reference tasks from Hour of Code: Maze Challenge and Karel. We assess the quality of these pop quizzes through expert ratings using an evaluation rubric. Further, we have built an online platform for practicing block-based programming tasks empowered via pop quiz based feedback, and report results from an initial user study.
Navigates Like Me: Understanding How People Evaluate Human-Like AI in Video Games
Mar 02, 2023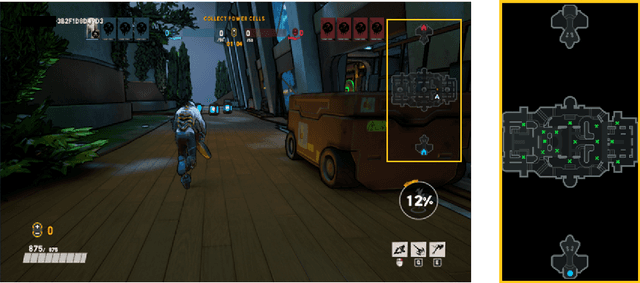

We aim to understand how people assess human likeness in navigation produced by people and artificially intelligent (AI) agents in a video game. To this end, we propose a novel AI agent with the goal of generating more human-like behavior. We collect hundreds of crowd-sourced assessments comparing the human-likeness of navigation behavior generated by our agent and baseline AI agents with human-generated behavior. Our proposed agent passes a Turing Test, while the baseline agents do not. By passing a Turing Test, we mean that human judges could not quantitatively distinguish between videos of a person and an AI agent navigating. To understand what people believe constitutes human-like navigation, we extensively analyze the justifications of these assessments. This work provides insights into the characteristics that people consider human-like in the context of goal-directed video game navigation, which is a key step for further improving human interactions with AI agents.
Trust-Region-Free Policy Optimization for Stochastic Policies
Feb 15, 2023Trust Region Policy Optimization (TRPO) is an iterative method that simultaneously maximizes a surrogate objective and enforces a trust region constraint over consecutive policies in each iteration. The combination of the surrogate objective maximization and the trust region enforcement has been shown to be crucial to guarantee a monotonic policy improvement. However, solving a trust-region-constrained optimization problem can be computationally intensive as it requires many steps of conjugate gradient and a large number of on-policy samples. In this paper, we show that the trust region constraint over policies can be safely substituted by a trust-region-free constraint without compromising the underlying monotonic improvement guarantee. The key idea is to generalize the surrogate objective used in TRPO in a way that a monotonic improvement guarantee still emerges as a result of constraining the maximum advantage-weighted ratio between policies. This new constraint outlines a conservative mechanism for iterative policy optimization and sheds light on practical ways to optimize the generalized surrogate objective. We show that the new constraint can be effectively enforced by being conservative when optimizing the generalized objective function in practice. We call the resulting algorithm Trust-REgion-Free Policy Optimization (TREFree) as it is free of any explicit trust region constraints. Empirical results show that TREFree outperforms TRPO and Proximal Policy Optimization (PPO) in terms of policy performance and sample efficiency.
Contrastive Meta-Learning for Partially Observable Few-Shot Learning
Jan 30, 2023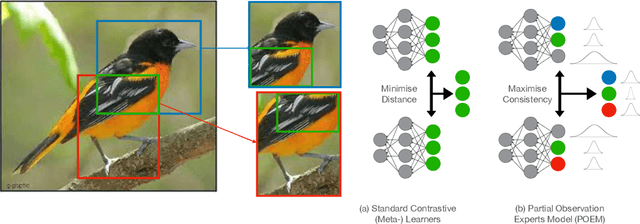

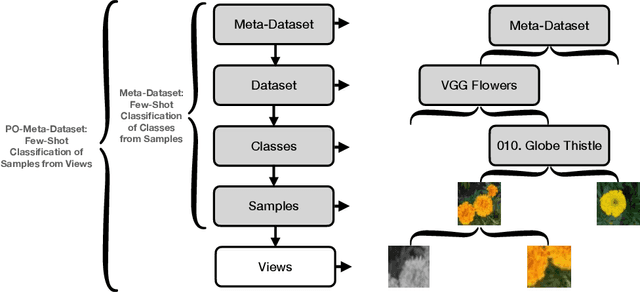

Many contrastive and meta-learning approaches learn representations by identifying common features in multiple views. However, the formalism for these approaches generally assumes features to be shared across views to be captured coherently. We consider the problem of learning a unified representation from partial observations, where useful features may be present in only some of the views. We approach this through a probabilistic formalism enabling views to map to representations with different levels of uncertainty in different components; these views can then be integrated with one another through marginalisation over that uncertainty. Our approach, Partial Observation Experts Modelling (POEM), then enables us to meta-learn consistent representations from partial observations. We evaluate our approach on an adaptation of a comprehensive few-shot learning benchmark, Meta-Dataset, and demonstrate the benefits of POEM over other meta-learning methods at representation learning from partial observations. We further demonstrate the utility of POEM by meta-learning to represent an environment from partial views observed by an agent exploring the environment.