 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen does predictive inverse dynamics outperform behavior cloning?
Jan 29, 2026Behavior cloning (BC) is a practical offline imitation learning method, but it often fails when expert demonstrations are limited. Recent works have introduced a class of architectures named predictive inverse dynamics models (PIDM) that combine a future state predictor with an inverse dynamics model (IDM). While PIDM often outperforms BC, the reasons behind its benefits remain unclear. In this paper, we provide a theoretical explanation: PIDM introduces a bias-variance tradeoff. While predicting the future state introduces bias, conditioning the IDM on the prediction can significantly reduce variance. We establish conditions on the state predictor bias for PIDM to achieve lower prediction error and higher sample efficiency than BC, with the gap widening when additional data sources are available. We validate the theoretical insights empirically in 2D navigation tasks, where BC requires up to five times (three times on average) more demonstrations than PIDM to reach comparable performance; and in a complex 3D environment in a modern video game with high-dimensional visual inputs and stochastic transitions, where BC requires over 66\% more samples than PIDM.
Adapting a World Model for Trajectory Following in a 3D Game
Apr 16, 2025



Imitation learning is a powerful tool for training agents by leveraging expert knowledge, and being able to replicate a given trajectory is an integral part of it. In complex environments, like modern 3D video games, distribution shift and stochasticity necessitate robust approaches beyond simple action replay. In this study, we apply Inverse Dynamics Models (IDM) with different encoders and policy heads to trajectory following in a modern 3D video game -- Bleeding Edge. Additionally, we investigate several future alignment strategies that address the distribution shift caused by the aleatoric uncertainty and imperfections of the agent. We measure both the trajectory deviation distance and the first significant deviation point between the reference and the agent's trajectory and show that the optimal configuration depends on the chosen setting. Our results show that in a diverse data setting, a GPT-style policy head with an encoder trained from scratch performs the best, DINOv2 encoder with the GPT-style policy head gives the best results in the low data regime, and both GPT-style and MLP-style policy heads had comparable results when pre-trained on a diverse setting and fine-tuned for a specific behaviour setting.
AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles
Jul 18, 2017

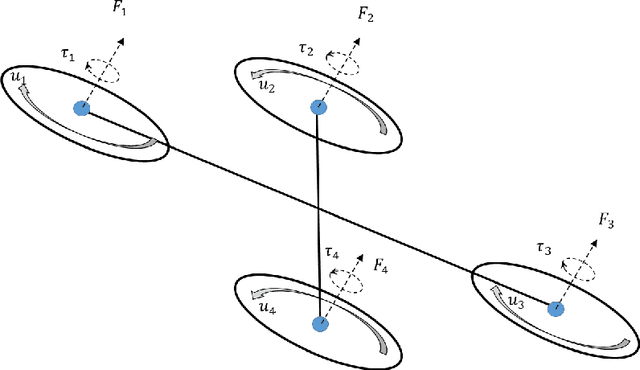

Developing and testing algorithms for autonomous vehicles in real world is an expensive and time consuming process. Also, in order to utilize recent advances in machine intelligence and deep learning we need to collect a large amount of annotated training data in a variety of conditions and environments. We present a new simulator built on Unreal Engine that offers physically and visually realistic simulations for both of these goals. Our simulator includes a physics engine that can operate at a high frequency for real-time hardware-in-the-loop (HITL) simulations with support for popular protocols (e.g. MavLink). The simulator is designed from the ground up to be extensible to accommodate new types of vehicles, hardware platforms and software protocols. In addition, the modular design enables various components to be easily usable independently in other projects. We demonstrate the simulator by first implementing a quadrotor as an autonomous vehicle and then experimentally comparing the software components with real-world flights.