 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePushing the Frontier of Audiovisual Perception with Large-Scale Multimodal Correspondence Learning
Dec 22, 2025We introduce Perception Encoder Audiovisual, PE-AV, a new family of encoders for audio and video understanding trained with scaled contrastive learning. Built on PE, PE-AV makes several key contributions to extend representations to audio, and natively support joint embeddings across audio-video, audio-text, and video-text modalities. PE-AV's unified cross-modal embeddings enable novel tasks such as speech retrieval, and set a new state of the art across standard audio and video benchmarks. We unlock this by building a strong audiovisual data engine that synthesizes high-quality captions for O(100M) audio-video pairs, enabling large-scale supervision consistent across modalities. Our audio data includes speech, music, and general sound effects-avoiding single-domain limitations common in prior work. We exploit ten pairwise contrastive objectives, showing that scaling cross-modality and caption-type pairs strengthens alignment and improves zero-shot performance. We further develop PE-A-Frame by fine-tuning PE-AV with frame-level contrastive objectives, enabling fine-grained audio-frame-to-text alignment for tasks such as sound event detection.
SAM Audio: Segment Anything in Audio
Dec 19, 2025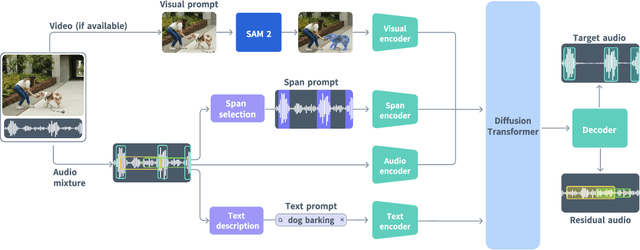

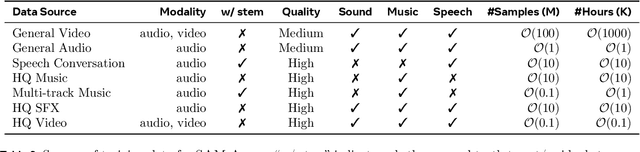
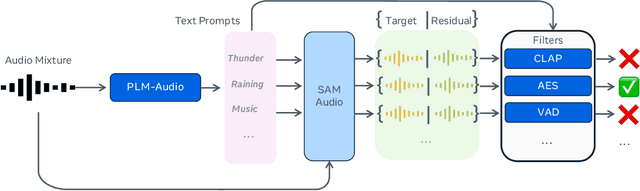
General audio source separation is a key capability for multimodal AI systems that can perceive and reason about sound. Despite substantial progress in recent years, existing separation models are either domain-specific, designed for fixed categories such as speech or music, or limited in controllability, supporting only a single prompting modality such as text. In this work, we present SAM Audio, a foundation model for general audio separation that unifies text, visual, and temporal span prompting within a single framework. Built on a diffusion transformer architecture, SAM Audio is trained with flow matching on large-scale audio data spanning speech, music, and general sounds, and can flexibly separate target sources described by language, visual masks, or temporal spans. The model achieves state-of-the-art performance across a diverse suite of benchmarks, including general sound, speech, music, and musical instrument separation in both in-the-wild and professionally produced audios, substantially outperforming prior general-purpose and specialized systems. Furthermore, we introduce a new real-world separation benchmark with human-labeled multimodal prompts and a reference-free evaluation model that correlates strongly with human judgment.
Perception Encoder: The best visual embeddings are not at the output of the network
Apr 17, 2025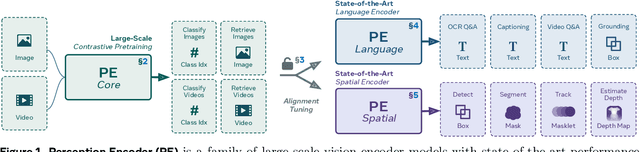

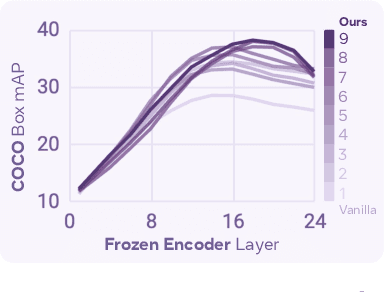
We introduce Perception Encoder (PE), a state-of-the-art encoder for image and video understanding trained via simple vision-language learning. Traditionally, vision encoders have relied on a variety of pretraining objectives, each tailored to specific downstream tasks such as classification, captioning, or localization. Surprisingly, after scaling our carefully tuned image pretraining recipe and refining with our robust video data engine, we find that contrastive vision-language training alone can produce strong, general embeddings for all of these downstream tasks. There is only one caveat: these embeddings are hidden within the intermediate layers of the network. To draw them out, we introduce two alignment methods, language alignment for multimodal language modeling, and spatial alignment for dense prediction. Together with the core contrastive checkpoint, our PE family of models achieves state-of-the-art performance on a wide variety of tasks, including zero-shot image and video classification and retrieval; document, image, and video Q&A; and spatial tasks such as detection, depth estimation, and tracking. To foster further research, we are releasing our models, code, and a novel dataset of synthetically and human-annotated videos.
PerceptionLM: Open-Access Data and Models for Detailed Visual Understanding
Apr 17, 2025



Vision-language models are integral to computer vision research, yet many high-performing models remain closed-source, obscuring their data, design and training recipe. The research community has responded by using distillation from black-box models to label training data, achieving strong benchmark results, at the cost of measurable scientific progress. However, without knowing the details of the teacher model and its data sources, scientific progress remains difficult to measure. In this paper, we study building a Perception Language Model (PLM) in a fully open and reproducible framework for transparent research in image and video understanding. We analyze standard training pipelines without distillation from proprietary models and explore large-scale synthetic data to identify critical data gaps, particularly in detailed video understanding. To bridge these gaps, we release 2.8M human-labeled instances of fine-grained video question-answer pairs and spatio-temporally grounded video captions. Additionally, we introduce PLM-VideoBench, a suite for evaluating challenging video understanding tasks focusing on the ability to reason about "what", "where", "when", and "how" of a video. We make our work fully reproducible by providing data, training recipes, code & models.
SAM 2: Segment Anything in Images and Videos
Aug 01, 2024



We present Segment Anything Model 2 (SAM 2), a foundation model towards solving promptable visual segmentation in images and videos. We build a data engine, which improves model and data via user interaction, to collect the largest video segmentation dataset to date. Our model is a simple transformer architecture with streaming memory for real-time video processing. SAM 2 trained on our data provides strong performance across a wide range of tasks. In video segmentation, we observe better accuracy, using 3x fewer interactions than prior approaches. In image segmentation, our model is more accurate and 6x faster than the Segment Anything Model (SAM). We believe that our data, model, and insights will serve as a significant milestone for video segmentation and related perception tasks. We are releasing a version of our model, the dataset and an interactive demo.
Segment Anything
Apr 05, 2023


We introduce the Segment Anything (SA) project: a new task, model, and dataset for image segmentation. Using our efficient model in a data collection loop, we built the largest segmentation dataset to date (by far), with over 1 billion masks on 11M licensed and privacy respecting images. The model is designed and trained to be promptable, so it can transfer zero-shot to new image distributions and tasks. We evaluate its capabilities on numerous tasks and find that its zero-shot performance is impressive -- often competitive with or even superior to prior fully supervised results. We are releasing the Segment Anything Model (SAM) and corresponding dataset (SA-1B) of 1B masks and 11M images at https://segment-anything.com to foster research into foundation models for computer vision.
The effectiveness of MAE pre-pretraining for billion-scale pretraining
Mar 23, 2023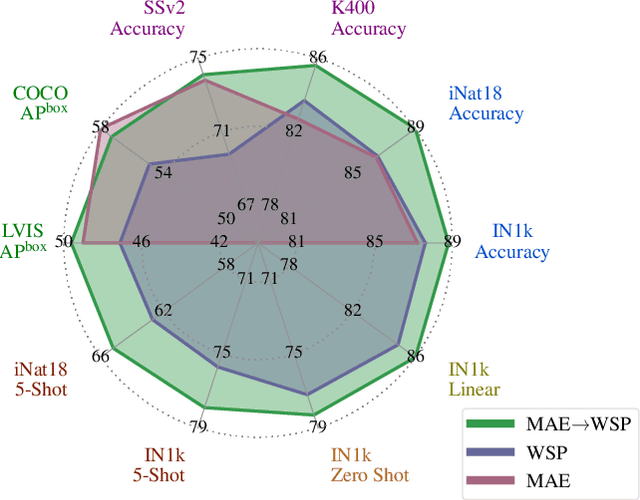

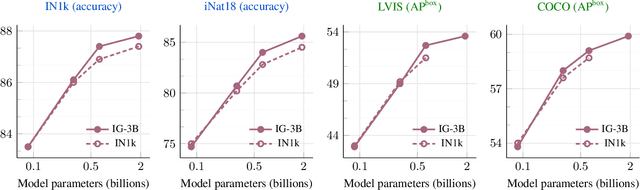
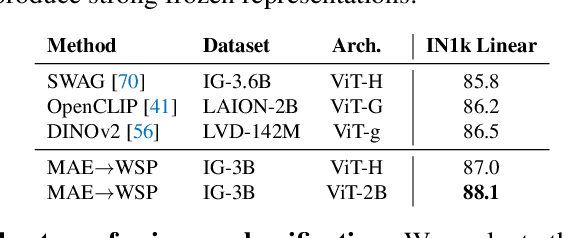
This paper revisits the standard pretrain-then-finetune paradigm used in computer vision for visual recognition tasks. Typically, state-of-the-art foundation models are pretrained using large scale (weakly) supervised datasets with billions of images. We introduce an additional pre-pretraining stage that is simple and uses the self-supervised MAE technique to initialize the model. While MAE has only been shown to scale with the size of models, we find that it scales with the size of the training dataset as well. Thus, our MAE-based pre-pretraining scales with both model and data size making it applicable for training foundation models. Pre-pretraining consistently improves both the model convergence and the downstream transfer performance across a range of model scales (millions to billions of parameters), and dataset sizes (millions to billions of images). We measure the effectiveness of pre-pretraining on 10 different visual recognition tasks spanning image classification, video recognition, object detection, low-shot classification and zero-shot recognition. Our largest model achieves new state-of-the-art results on iNaturalist-18 (91.3%), 1-shot ImageNet-1k (62.1%), and zero-shot transfer on Food-101 (96.0%). Our study reveals that model initialization plays a significant role, even for web-scale pretraining with billions of images.
Revisiting Weakly Supervised Pre-Training of Visual Perception Models
Jan 20, 2022



Model pre-training is a cornerstone of modern visual recognition systems. Although fully supervised pre-training on datasets like ImageNet is still the de-facto standard, recent studies suggest that large-scale weakly supervised pre-training can outperform fully supervised approaches. This paper revisits weakly-supervised pre-training of models using hashtag supervision with modern versions of residual networks and the largest-ever dataset of images and corresponding hashtags. We study the performance of the resulting models in various transfer-learning settings including zero-shot transfer. We also compare our models with those obtained via large-scale self-supervised learning. We find our weakly-supervised models to be very competitive across all settings, and find they substantially outperform their self-supervised counterparts. We also include an investigation into whether our models learned potentially troubling associations or stereotypes. Overall, our results provide a compelling argument for the use of weakly supervised learning in the development of visual recognition systems. Our models, Supervised Weakly through hashtAGs (SWAG), are available publicly.
Masked Autoencoders Are Scalable Vision Learners
Dec 02, 2021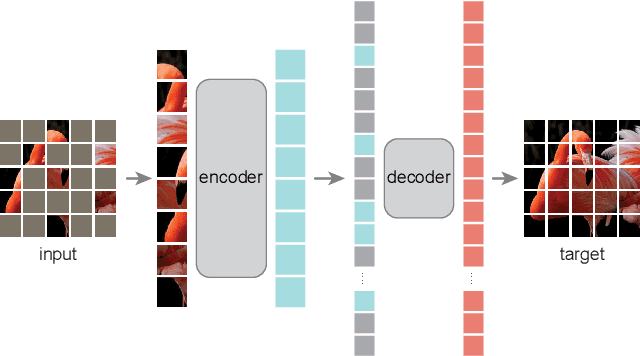


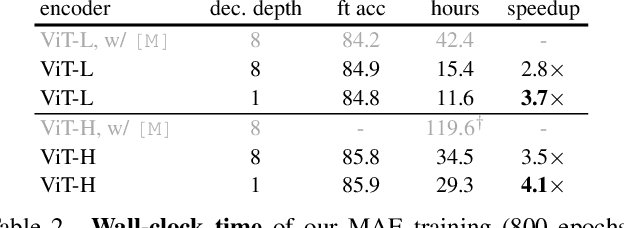
This paper shows that masked autoencoders (MAE) are scalable self-supervised learners for computer vision. Our MAE approach is simple: we mask random patches of the input image and reconstruct the missing pixels. It is based on two core designs. First, we develop an asymmetric encoder-decoder architecture, with an encoder that operates only on the visible subset of patches (without mask tokens), along with a lightweight decoder that reconstructs the original image from the latent representation and mask tokens. Second, we find that masking a high proportion of the input image, e.g., 75%, yields a nontrivial and meaningful self-supervisory task. Coupling these two designs enables us to train large models efficiently and effectively: we accelerate training (by 3x or more) and improve accuracy. Our scalable approach allows for learning high-capacity models that generalize well: e.g., a vanilla ViT-Huge model achieves the best accuracy (87.8%) among methods that use only ImageNet-1K data. Transfer performance in downstream tasks outperforms supervised pre-training and shows promising scaling behavior.
Early Convolutions Help Transformers See Better
Jul 12, 2021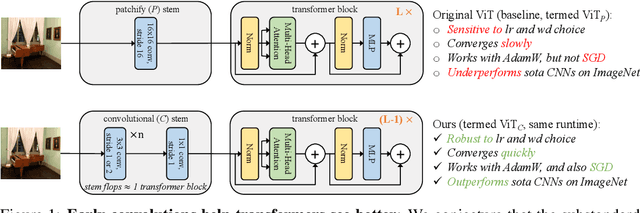

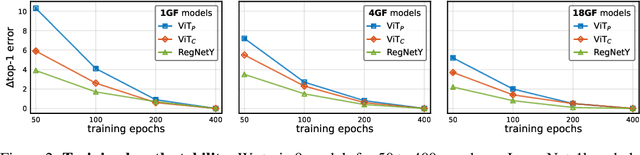
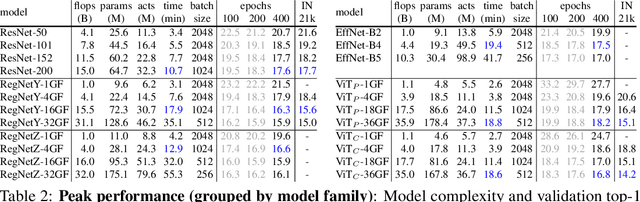
Vision transformer (ViT) models exhibit substandard optimizability. In particular, they are sensitive to the choice of optimizer (AdamW vs. SGD), optimizer hyperparameters, and training schedule length. In comparison, modern convolutional neural networks are far easier to optimize. Why is this the case? In this work, we conjecture that the issue lies with the patchify stem of ViT models, which is implemented by a stride-p pxp convolution (p=16 by default) applied to the input image. This large-kernel plus large-stride convolution runs counter to typical design choices of convolutional layers in neural networks. To test whether this atypical design choice causes an issue, we analyze the optimization behavior of ViT models with their original patchify stem versus a simple counterpart where we replace the ViT stem by a small number of stacked stride-two 3x3 convolutions. While the vast majority of computation in the two ViT designs is identical, we find that this small change in early visual processing results in markedly different training behavior in terms of the sensitivity to optimization settings as well as the final model accuracy. Using a convolutional stem in ViT dramatically increases optimization stability and also improves peak performance (by ~1-2% top-1 accuracy on ImageNet-1k), while maintaining flops and runtime. The improvement can be observed across the wide spectrum of model complexities (from 1G to 36G flops) and dataset scales (from ImageNet-1k to ImageNet-21k). These findings lead us to recommend using a standard, lightweight convolutional stem for ViT models as a more robust architectural choice compared to the original ViT model design.