 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeACAVCaps: Enabling large-scale training for fine-grained and diverse audio understanding
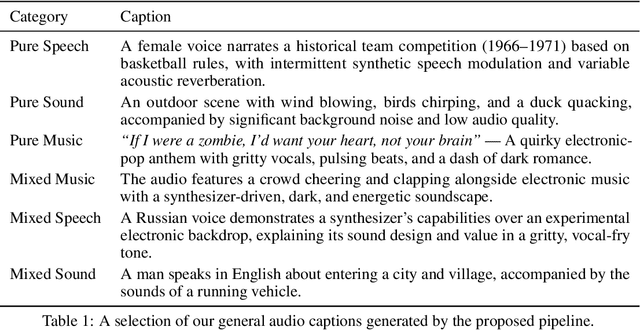
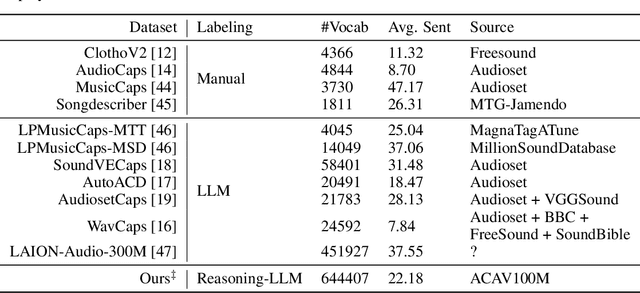
Mar 25, 2026General audio understanding is a fundamental goal for large audio-language models, with audio captioning serving as a cornerstone task for their development. However, progress in this domain is hindered by existing datasets, which lack the scale and descriptive granularity required to train truly versatile models. To address this gap, we introduce ACAVCaps, a new large-scale, fine-grained, and multi-faceted audio captioning dataset. Derived from the ACAV100M collection, ACAVCaps is constructed using a multi-expert pipeline that analyzes audio from diverse perspectives-including speech, music, and acoustic properties-which are then synthesized into rich, detailed descriptions by a large language model. Experimental results demonstrate that models pre-trained on ACAVCaps exhibit substantially stronger generalization capabilities on various downstream tasks compared to those trained on other leading captioning datasets. The dataset is available at https://github.com/xiaomi-research/acavcaps.
The Interspeech 2026 Audio Encoder Capability Challenge for Large Audio Language Models
Mar 24, 2026This paper presents the Interspeech 2026 Audio Encoder Capability Challenge, a benchmark specifically designed to evaluate and advance the performance of pre-trained audio encoders as front-end modules for Large Audio Language Models (LALMs). While LALMs have shown remarkable understanding of complex acoustic scenes, their performance depends on the semantic richness of the underlying audio encoder representations. This challenge addresses the integration gap by providing a unified generative evaluation framework, XARES-LLM, which assesses submitted encoders across a diverse suite of downstream classification and generation tasks. By decoupling encoder development from LLM fine-tuning, the challenge establishes a standardized protocol for general-purpose audio representations that can effectively be used for the next generation of multimodal language models.
DashengTokenizer: One layer is enough for unified audio understanding and generation
Feb 27, 2026This paper introduces DashengTokenizer, a continuous audio tokenizer engineered for joint use in both understanding and generation tasks. Unlike conventional approaches, which train acoustic tokenizers and subsequently integrate frozen semantic knowledge, our method inverts this paradigm: we leverage frozen semantic features and inject acoustic information. In linear evaluation across 22 diverse tasks, our method outperforms previous audio codec and audio encoder baselines by a significant margin while maintaining competitive audio reconstruction quality. Notably, we demonstrate that this acoustic injection improves performance for tasks such as speech emotion recognition, music understanding, and acoustic scene classification. We further evaluate the tokenizer's generative performance on text-to-audio (TTA), text-to-music (TTM), and speech enhancement (SE). Our approach surpasses standard variational autoencoder (VAE)-based methods on TTA and TTM tasks, while its effectiveness on SE underscores its capabilities as a general-purpose audio encoder. Finally, our results challenge the prevailing assumption that VAE-based architectures are a prerequisite for audio synthesis. Checkpoints are available at https://huggingface.co/mispeech/dashengtokenizer.
Scaling World Model for Hierarchical Manipulation Policies
Feb 12, 2026Vision-Language-Action (VLA) models are promising for generalist robot manipulation but remain brittle in out-of-distribution (OOD) settings, especially with limited real-robot data. To resolve the generalization bottleneck, we introduce a hierarchical Vision-Language-Action framework \our{} that leverages the generalization of large-scale pre-trained world model for robust and generalizable VIsual Subgoal TAsk decomposition VISTA. Our hierarchical framework \our{} consists of a world model as the high-level planner and a VLA as the low-level executor. The high-level world model first divides manipulation tasks into subtask sequences with goal images, and the low-level policy follows the textual and visual guidance to generate action sequences. Compared to raw textual goal specification, these synthesized goal images provide visually and physically grounded details for low-level policies, making it feasible to generalize across unseen objects and novel scenarios. We validate both visual goal synthesis and our hierarchical VLA policies in massive out-of-distribution scenarios, and the performance of the same-structured VLA in novel scenarios could boost from 14% to 69% with the guidance generated by the world model. Results demonstrate that our method outperforms previous baselines with a clear margin, particularly in out-of-distribution scenarios. Project page: \href{https://vista-wm.github.io/}{https://vista-wm.github.io}
Let It Flow: Agentic Crafting on Rock and Roll, Building the ROME Model within an Open Agentic Learning Ecosystem
Dec 31, 2025Agentic crafting requires LLMs to operate in real-world environments over multiple turns by taking actions, observing outcomes, and iteratively refining artifacts. Despite its importance, the open-source community lacks a principled, end-to-end ecosystem to streamline agent development. We introduce the Agentic Learning Ecosystem (ALE), a foundational infrastructure that optimizes the production pipeline for agent LLMs. ALE consists of three components: ROLL, a post-training framework for weight optimization; ROCK, a sandbox environment manager for trajectory generation; and iFlow CLI, an agent framework for efficient context engineering. We release ROME (ROME is Obviously an Agentic Model), an open-source agent grounded by ALE and trained on over one million trajectories. Our approach includes data composition protocols for synthesizing complex behaviors and a novel policy optimization algorithm, Interaction-based Policy Alignment (IPA), which assigns credit over semantic interaction chunks rather than individual tokens to improve long-horizon training stability. Empirically, we evaluate ROME within a structured setting and introduce Terminal Bench Pro, a benchmark with improved scale and contamination control. ROME demonstrates strong performance across benchmarks like SWE-bench Verified and Terminal Bench, proving the effectiveness of the ALE infrastructure.
JoyAgent-JDGenie: Technical Report on the GAIA
Oct 01, 2025Large Language Models are increasingly deployed as autonomous agents for complex real-world tasks, yet existing systems often focus on isolated improvements without a unifying design for robustness and adaptability. We propose a generalist agent architecture that integrates three core components: a collective multi-agent framework combining planning and execution agents with critic model voting, a hierarchical memory system spanning working, semantic, and procedural layers, and a refined tool suite for search, code execution, and multimodal parsing. Evaluated on a comprehensive benchmark, our framework consistently outperforms open-source baselines and approaches the performance of proprietary systems. These results demonstrate the importance of system-level integration and highlight a path toward scalable, resilient, and adaptive AI assistants capable of operating across diverse domains and tasks.
MiDashengLM: Efficient Audio Understanding with General Audio Captions
Aug 06, 2025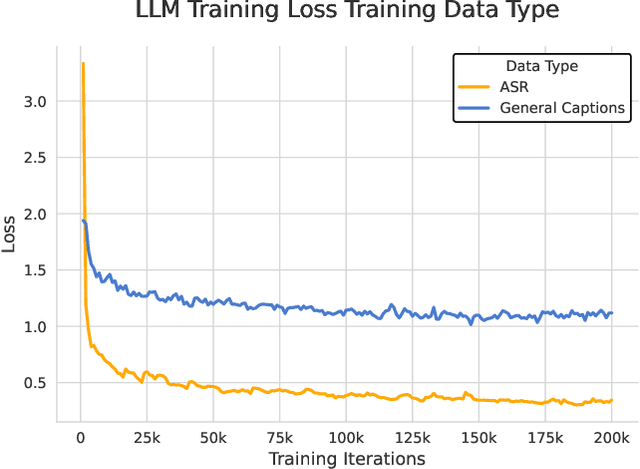
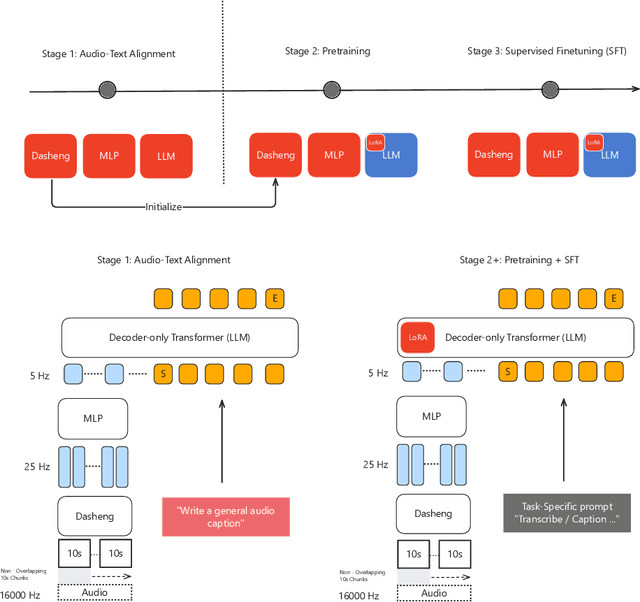
Current approaches for large audio language models (LALMs) often rely on closed data sources or proprietary models, limiting their generalization and accessibility. This paper introduces MiDashengLM, a novel open audio-language model designed for efficient and comprehensive audio understanding through the use of general audio captions using our novel ACAVCaps training dataset. MiDashengLM exclusively relies on publicly available pretraining and supervised fine-tuning (SFT) datasets, ensuring full transparency and reproducibility. At its core, MiDashengLM integrates Dasheng, an open-source audio encoder, specifically engineered to process diverse auditory information effectively. Unlike previous works primarily focused on Automatic Speech Recognition (ASR) based audio-text alignment, our strategy centers on general audio captions, fusing speech, sound and music information into one textual representation, enabling a holistic textual representation of complex audio scenes. Lastly, MiDashengLM provides an up to 4x speedup in terms of time-to-first-token (TTFT) and up to 20x higher throughput than comparable models. Checkpoints are available online at https://huggingface.co/mispeech/midashenglm-7b and https://github.com/xiaomi-research/dasheng-lm.
Unified Vision-Language-Action Model
Jun 24, 2025



Vision-language-action models (VLAs) have garnered significant attention for their potential in advancing robotic manipulation. However, previous approaches predominantly rely on the general comprehension capabilities of vision-language models (VLMs) to generate action signals, often overlooking the rich temporal and causal structure embedded in visual observations. In this paper, we present UniVLA, a unified and native multimodal VLA model that autoregressively models vision, language, and action signals as discrete token sequences. This formulation enables flexible multimodal tasks learning, particularly from large-scale video data. By incorporating world modeling during post-training, UniVLA captures causal dynamics from videos, facilitating effective transfer to downstream policy learning--especially for long-horizon tasks. Our approach sets new state-of-the-art results across several widely used simulation benchmarks, including CALVIN, LIBERO, and Simplenv-Bridge, significantly surpassing previous methods. For example, UniVLA achieves 95.5% average success rate on LIBERO benchmark, surpassing pi0-FAST's 85.5%. We further demonstrate its broad applicability on real-world ALOHA manipulation and autonomous driving.
Efficient Speech Enhancement via Embeddings from Pre-trained Generative Audioencoders
Jun 13, 2025Recent research has delved into speech enhancement (SE) approaches that leverage audio embeddings from pre-trained models, diverging from time-frequency masking or signal prediction techniques. This paper introduces an efficient and extensible SE method. Our approach involves initially extracting audio embeddings from noisy speech using a pre-trained audioencoder, which are then denoised by a compact encoder network. Subsequently, a vocoder synthesizes the clean speech from denoised embeddings. An ablation study substantiates the parameter efficiency of the denoise encoder with a pre-trained audioencoder and vocoder. Experimental results on both speech enhancement and speaker fidelity demonstrate that our generative audioencoder-based SE system outperforms models utilizing discriminative audioencoders. Furthermore, subjective listening tests validate that our proposed system surpasses an existing state-of-the-art SE model in terms of perceptual quality.
GLAP: General contrastive audio-text pretraining across domains and languages
Jun 12, 2025



Contrastive Language Audio Pretraining (CLAP) is a widely-used method to bridge the gap between audio and text domains. Current CLAP methods enable sound and music retrieval in English, ignoring multilingual spoken content. To address this, we introduce general language audio pretraining (GLAP), which expands CLAP with multilingual and multi-domain abilities. GLAP demonstrates its versatility by achieving competitive performance on standard audio-text retrieval benchmarks like Clotho and AudioCaps, while significantly surpassing existing methods in speech retrieval and classification tasks. Additionally, GLAP achieves strong results on widely used sound-event zero-shot benchmarks, while simultaneously outperforming previous methods on speech content benchmarks. Further keyword spotting evaluations across 50 languages emphasize GLAP's advanced multilingual capabilities. Finally, multilingual sound and music understanding is evaluated across four languages. Checkpoints and Source: https://github.com/xiaomi-research/dasheng-glap.