 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVideo-MSR: Benchmarking Multi-hop Spatial Reasoning Capabilities of MLLMs
Jan 14, 2026Spatial reasoning has emerged as a critical capability for Multimodal Large Language Models (MLLMs), drawing increasing attention and rapid advancement. However, existing benchmarks primarily focus on single-step perception-to-judgment tasks, leaving scenarios requiring complex visual-spatial logical chains significantly underexplored. To bridge this gap, we introduce Video-MSR, the first benchmark specifically designed to evaluate Multi-hop Spatial Reasoning (MSR) in dynamic video scenarios. Video-MSR systematically probes MSR capabilities through four distinct tasks: Constrained Localization, Chain-based Reference Retrieval, Route Planning, and Counterfactual Physical Deduction. Our benchmark comprises 3,052 high-quality video instances with 4,993 question-answer pairs, constructed via a scalable, visually-grounded pipeline combining advanced model generation with rigorous human verification. Through a comprehensive evaluation of 20 state-of-the-art MLLMs, we uncover significant limitations, revealing that while models demonstrate proficiency in surface-level perception, they exhibit distinct performance drops in MSR tasks, frequently suffering from spatial disorientation and hallucination during multi-step deductions. To mitigate these shortcomings and empower models with stronger MSR capabilities, we further curate MSR-9K, a specialized instruction-tuning dataset, and fine-tune Qwen-VL, achieving a +7.82% absolute improvement on Video-MSR. Our results underscore the efficacy of multi-hop spatial instruction data and establish Video-MSR as a vital foundation for future research. The code and data will be available at https://github.com/ruiz-nju/Video-MSR.
Adversarial Yet Cooperative: Multi-Perspective Reasoning in Retrieved-Augmented Language Models
Jan 08, 2026Recent advances in synergizing large reasoning models (LRMs) with retrieval-augmented generation (RAG) have shown promising results, yet two critical challenges remain: (1) reasoning models typically operate from a single, unchallenged perspective, limiting their ability to conduct deep, self-correcting reasoning over external documents, and (2) existing training paradigms rely excessively on outcome-oriented rewards, which provide insufficient signal for shaping the complex, multi-step reasoning process. To address these issues, we propose an Reasoner-Verifier framework named Adversarial Reasoning RAG (ARR). The Reasoner and Verifier engage in reasoning on retrieved evidence and critiquing each other's logic while being guided by process-aware advantage that requires no external scoring model. This reward combines explicit observational signals with internal model uncertainty to jointly optimize reasoning fidelity and verification rigor. Experiments on multiple benchmarks demonstrate the effectiveness of our method.
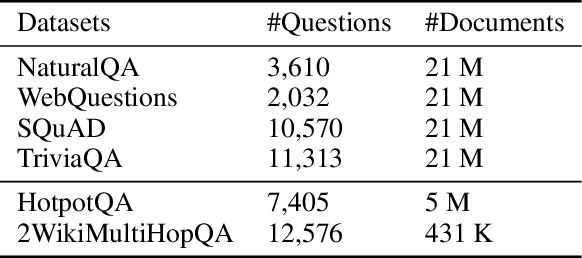
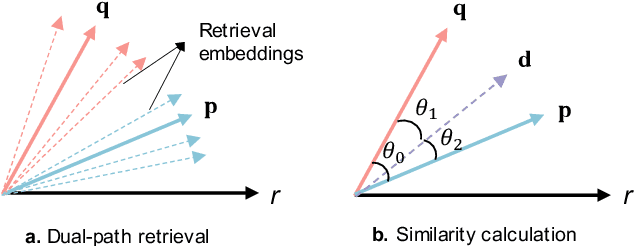
Decide Then Retrieve: A Training-Free Framework with Uncertainty-Guided Triggering and Dual-Path Retrieval
Jan 07, 2026Retrieval-augmented generation (RAG) enhances large language models (LLMs) by incorporating external knowledge, but existing approaches indiscriminately trigger retrieval and rely on single-path evidence construction, often introducing noise and limiting performance gains. In this work, we propose Decide Then Retrieve (DTR), a training-free framework that adaptively determines when retrieval is necessary and how external information should be selected. DTR leverages generation uncertainty to guide retrieval triggering and introduces a dual-path retrieval mechanism with adaptive information selection to better handle sparse and ambiguous queries. Extensive experiments across five open-domain QA benchmarks, multiple model scales, and different retrievers demonstrate that DTR consistently improves EM and F1 over standard RAG and strong retrieval-enhanced baselines, while reducing unnecessary retrievals. The code and data used in this paper are available at https://github.com/ChenWangHKU/DTR.
BBox DocVQA: A Large Scale Bounding Box Grounded Dataset for Enhancing Reasoning in Document Visual Question Answer
Nov 19, 2025Document Visual Question Answering (DocVQA) is a fundamental task for multimodal document understanding and a key testbed for vision language reasoning. However, most existing DocVQA datasets are limited to the page level and lack fine grained spatial grounding, constraining the interpretability and reasoning capability of Vision Language Models (VLMs). To address this gap, we introduce BBox DocVQA a large scale, bounding box grounded dataset designed to enhance spatial reasoning and evidence localization in visual documents. We further present an automated construction pipeline, Segment Judge and Generate, which integrates a segment model for region segmentation, a VLM for semantic judgment, and another advanced VLM for question answer generation, followed by human verification for quality assurance. The resulting dataset contains 3.6 K diverse documents and 32 K QA pairs, encompassing single and multi region as well as single and multi page scenarios. Each QA instance is grounded on explicit bounding boxes, enabling fine grained evaluation of spatial semantic alignment. Benchmarking multiple state of the art VLMs (e.g., GPT 5, Qwen2.5 VL, and InternVL) on BBox DocVQA reveals persistent challenges in spatial grounding and reasoning accuracy. Furthermore, fine tuning on BBox DocVQA substantially improves both bounding box localization and answer generation, validating its effectiveness for enhancing the reasoning ability of VLMs. Our dataset and code will be publicly released to advance research on interpretable and spatially grounded vision language reasoning.
Facial-R1: Aligning Reasoning and Recognition for Facial Emotion Analysis
Nov 13, 2025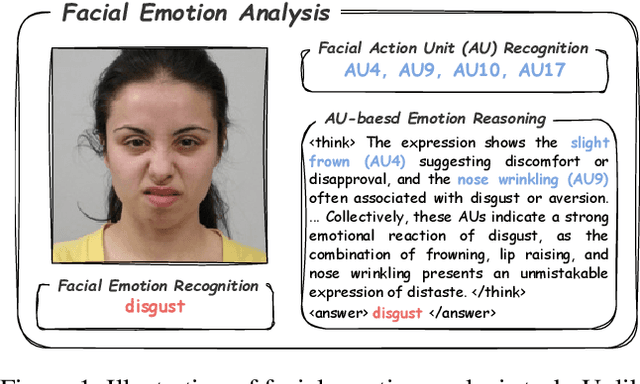
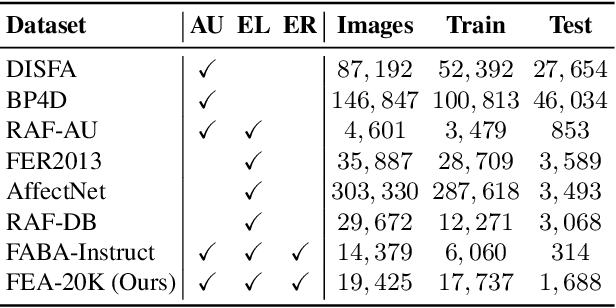
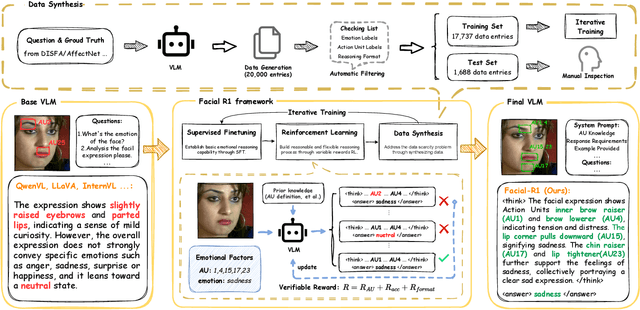
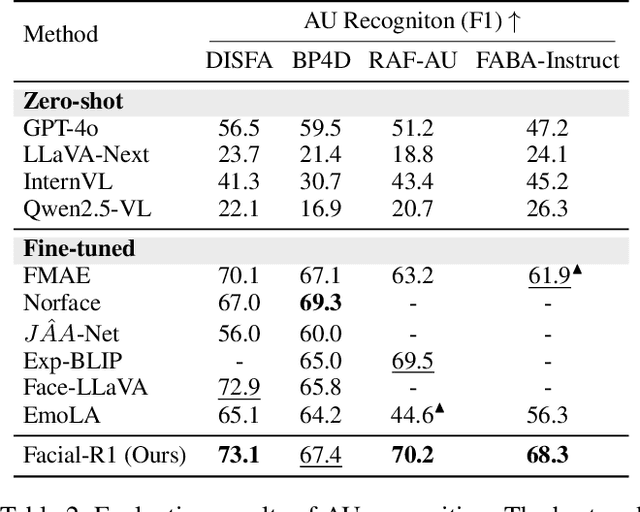
Facial Emotion Analysis (FEA) extends traditional facial emotion recognition by incorporating explainable, fine-grained reasoning. The task integrates three subtasks: emotion recognition, facial Action Unit (AU) recognition, and AU-based emotion reasoning to model affective states jointly. While recent approaches leverage Vision-Language Models (VLMs) and achieve promising results, they face two critical limitations: (1) hallucinated reasoning, where VLMs generate plausible but inaccurate explanations due to insufficient emotion-specific knowledge; and (2) misalignment between emotion reasoning and recognition, caused by fragmented connections between observed facial features and final labels. We propose Facial-R1, a three-stage alignment framework that effectively addresses both challenges with minimal supervision. First, we employ instruction fine-tuning to establish basic emotional reasoning capability. Second, we introduce reinforcement training guided by emotion and AU labels as reward signals, which explicitly aligns the generated reasoning process with the predicted emotion. Third, we design a data synthesis pipeline that iteratively leverages the prior stages to expand the training dataset, enabling scalable self-improvement of the model. Built upon this framework, we introduce FEA-20K, a benchmark dataset comprising 17,737 training and 1,688 test samples with fine-grained emotion analysis annotations. Extensive experiments across eight standard benchmarks demonstrate that Facial-R1 achieves state-of-the-art performance in FEA, with strong generalization and robust interpretability.
Personalized Prediction By Learning Halfspace Reference Classes Under Well-Behaved Distribution
Sep 19, 2025

In machine learning applications, predictive models are trained to serve future queries across the entire data distribution. Real-world data often demands excessively complex models to achieve competitive performance, however, sacrificing interpretability. Hence, the growing deployment of machine learning models in high-stakes applications, such as healthcare, motivates the search for methods for accurate and explainable predictions. This work proposes a Personalized Prediction scheme, where an easy-to-interpret predictor is learned per query. In particular, we wish to produce a "sparse linear" classifier with competitive performance specifically on some sub-population that includes the query point. The goal of this work is to study the PAC-learnability of this prediction model for sub-populations represented by "halfspaces" in a label-agnostic setting. We first give a distribution-specific PAC-learning algorithm for learning reference classes for personalized prediction. By leveraging both the reference-class learning algorithm and a list learner of sparse linear representations, we prove the first upper bound, $O(\mathrm{opt}^{1/4} )$, for personalized prediction with sparse linear classifiers and homogeneous halfspace subsets. We also evaluate our algorithms on a variety of standard benchmark data sets.
Cross-LoRA: A Data-Free LoRA Transfer Framework across Heterogeneous LLMs
Aug 07, 2025Traditional parameter-efficient fine-tuning (PEFT) methods such as LoRA are tightly coupled with the base model architecture, which constrains their applicability across heterogeneous pretrained large language models (LLMs). To address this limitation, we introduce Cross-LoRA, a data-free framework for transferring LoRA modules between diverse base models without requiring additional training data. Cross-LoRA consists of two key components: (a) LoRA-Align, which performs subspace alignment between source and target base models through rank-truncated singular value decomposition (SVD) and Frobenius-optimal linear transformation, ensuring compatibility under dimension mismatch; and (b) LoRA-Shift, which applies the aligned subspaces to project source LoRA weight updates into the target model parameter space. Both components are data-free, training-free, and enable lightweight adaptation on a commodity GPU in 20 minutes. Experiments on ARCs, OBOA and HellaSwag show that Cross-LoRA achieves relative gains of up to 5.26% over base models. Across other commonsense reasoning benchmarks, Cross-LoRA maintains performance comparable to that of directly trained LoRA adapters.
PAIRS: Parametric-Verified Adaptive Information Retrieval and Selection for Efficient RAG
Aug 06, 2025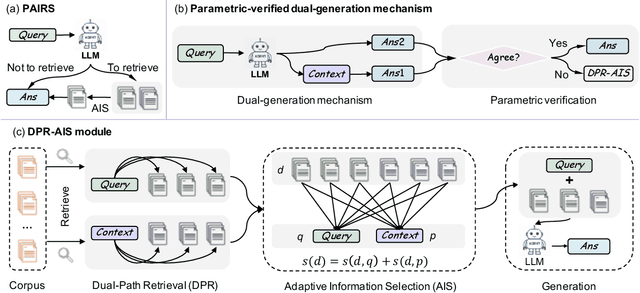
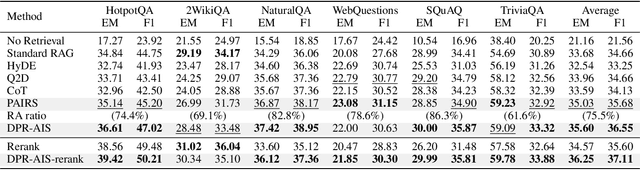
Retrieval-Augmented Generation (RAG) has become a cornerstone technique for enhancing large language models (LLMs) with external knowledge. However, current RAG systems face two critical limitations: (1) they inefficiently retrieve information for every query, including simple questions that could be resolved using the LLM's parametric knowledge alone, and (2) they risk retrieving irrelevant documents when queries contain sparse information signals. To address these gaps, we introduce Parametric-verified Adaptive Information Retrieval and Selection (PAIRS), a training-free framework that integrates parametric and retrieved knowledge to adaptively determine whether to retrieve and how to select external information. Specifically, PAIRS employs a dual-path generation mechanism: First, the LLM produces both a direct answer and a context-augmented answer using self-generated pseudo-context. When these outputs converge, PAIRS bypasses external retrieval entirely, dramatically improving the RAG system's efficiency. For divergent cases, PAIRS activates a dual-path retrieval (DPR) process guided by both the original query and self-generated contextual signals, followed by an Adaptive Information Selection (AIS) module that filters documents through weighted similarity to both sources. This simple yet effective approach can not only enhance efficiency by eliminating unnecessary retrievals but also improve accuracy through contextually guided retrieval and adaptive information selection. Experimental results on six question-answering (QA) benchmarks show that PAIRS reduces retrieval costs by around 25% (triggering for only 75% of queries) while still improving accuracy-achieving +1.1% EM and +1.0% F1 over prior baselines on average.
LDMapNet-U: An End-to-End System for City-Scale Lane-Level Map Updating
Jan 06, 2025



An up-to-date city-scale lane-level map is an indispensable infrastructure and a key enabling technology for ensuring the safety and user experience of autonomous driving systems. In industrial scenarios, reliance on manual annotation for map updates creates a critical bottleneck. Lane-level updates require precise change information and must ensure consistency with adjacent data while adhering to strict standards. Traditional methods utilize a three-stage approach-construction, change detection, and updating-which often necessitates manual verification due to accuracy limitations. This results in labor-intensive processes and hampers timely updates. To address these challenges, we propose LDMapNet-U, which implements a new end-to-end paradigm for city-scale lane-level map updating. By reconceptualizing the update task as an end-to-end map generation process grounded in historical map data, we introduce a paradigm shift in map updating that simultaneously generates vectorized maps and change information. To achieve this, a Prior-Map Encoding (PME) module is introduced to effectively encode historical maps, serving as a critical reference for detecting changes. Additionally, we incorporate a novel Instance Change Prediction (ICP) module that learns to predict associations with historical maps. Consequently, LDMapNet-U simultaneously achieves vectorized map element generation and change detection. To demonstrate the superiority and effectiveness of LDMapNet-U, extensive experiments are conducted using large-scale real-world datasets. In addition, LDMapNet-U has been successfully deployed in production at Baidu Maps since April 2024, supporting map updating for over 360 cities and significantly shortening the update cycle from quarterly to weekly. The updated maps serve hundreds of millions of users and are integrated into the autonomous driving systems of several leading vehicle companies.
DuMapper: Towards Automatic Verification of Large-Scale POIs with Street Views at Baidu Maps
Nov 27, 2024
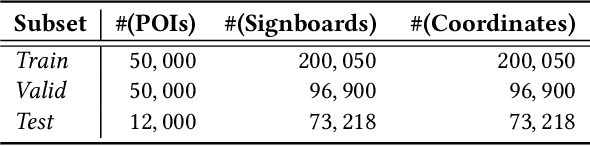
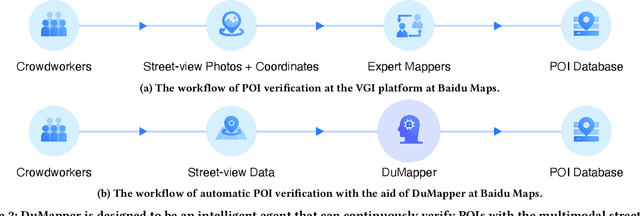

With the increased popularity of mobile devices, Web mapping services have become an indispensable tool in our daily lives. To provide user-satisfied services, such as location searches, the point of interest (POI) database is the fundamental infrastructure, as it archives multimodal information on billions of geographic locations closely related to people's lives, such as a shop or a bank. Therefore, verifying the correctness of a large-scale POI database is vital. To achieve this goal, many industrial companies adopt volunteered geographic information (VGI) platforms that enable thousands of crowdworkers and expert mappers to verify POIs seamlessly; but to do so, they have to spend millions of dollars every year. To save the tremendous labor costs, we devised DuMapper, an automatic system for large-scale POI verification with the multimodal street-view data at Baidu Maps. DuMapper takes the signboard image and the coordinates of a real-world place as input to generate a low-dimensional vector, which can be leveraged by ANN algorithms to conduct a more accurate search through billions of archived POIs in the database for verification within milliseconds. It can significantly increase the throughput of POI verification by $50$ times. DuMapper has already been deployed in production since \DuMPOnline, which dramatically improves the productivity and efficiency of POI verification at Baidu Maps. As of December 31, 2021, it has enacted over $405$ million iterations of POI verification within a 3.5-year period, representing an approximate workload of $800$ high-performance expert mappers.