 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapAgent: An Industrial-Grade Agentic Framework for City-scale Lane-level Map Generation
Jun 03, 2026Lane-level maps are critical infrastructure for autonomous driving and lane-level navigation, yet constructing and maintaining standardized lane networks for hundreds of cities remains highly labor-intensive. Recent end-to-end vectorized mapping methods can predict lane geometry and topology directly from sensor data, but they typically treat mapping specifications and traffic regulations as implicit, dataset-dependent supervision. Moreover, in complex scenes (e.g., worn or missing markings and occlusions), correct lane configurations are often under-determined by visual evidence alone, making specification violations a major source of human post-editing. We propose MapAgent, an industrial-grade agentic architecture that augments a vectorization backbone for specification-compliant lane-map production. Rather than merely adding an agent loop to map prediction, MapAgent couples backbone perception with explicit specification verification, constraint-aware reasoning, and deterministic map editing under a bounded, verification-driven Judge-Planner-Worker loop. A vision-language Judge diagnoses errors by jointly inspecting visual evidence and draft vectors, while a tool-calling Planner generates minimal corrective edits with post-edit re-validation. To remain scalable for city-scale production, MapAgent is selectively triggered only on tiles with low backbone confidence, adding modest overhead while preserving throughput. Experiments on real-world datasets show consistent gains over strong production baselines, especially in complex and long-tail scenarios. Additionally, MapAgent has been integrated into Baidu Maps, supporting lane-level map generation for over 360 cities nationwide and elevating the overall production automation to over 95%, demonstrating MapAgent's practicality and effectiveness for large-scale lane-level map generation.
LDMapNet-U: An End-to-End System for City-Scale Lane-Level Map Updating
Jan 06, 2025



An up-to-date city-scale lane-level map is an indispensable infrastructure and a key enabling technology for ensuring the safety and user experience of autonomous driving systems. In industrial scenarios, reliance on manual annotation for map updates creates a critical bottleneck. Lane-level updates require precise change information and must ensure consistency with adjacent data while adhering to strict standards. Traditional methods utilize a three-stage approach-construction, change detection, and updating-which often necessitates manual verification due to accuracy limitations. This results in labor-intensive processes and hampers timely updates. To address these challenges, we propose LDMapNet-U, which implements a new end-to-end paradigm for city-scale lane-level map updating. By reconceptualizing the update task as an end-to-end map generation process grounded in historical map data, we introduce a paradigm shift in map updating that simultaneously generates vectorized maps and change information. To achieve this, a Prior-Map Encoding (PME) module is introduced to effectively encode historical maps, serving as a critical reference for detecting changes. Additionally, we incorporate a novel Instance Change Prediction (ICP) module that learns to predict associations with historical maps. Consequently, LDMapNet-U simultaneously achieves vectorized map element generation and change detection. To demonstrate the superiority and effectiveness of LDMapNet-U, extensive experiments are conducted using large-scale real-world datasets. In addition, LDMapNet-U has been successfully deployed in production at Baidu Maps since April 2024, supporting map updating for over 360 cities and significantly shortening the update cycle from quarterly to weekly. The updated maps serve hundreds of millions of users and are integrated into the autonomous driving systems of several leading vehicle companies.
DuMapNet: An End-to-End Vectorization System for City-Scale Lane-Level Map Generation
Jun 20, 2024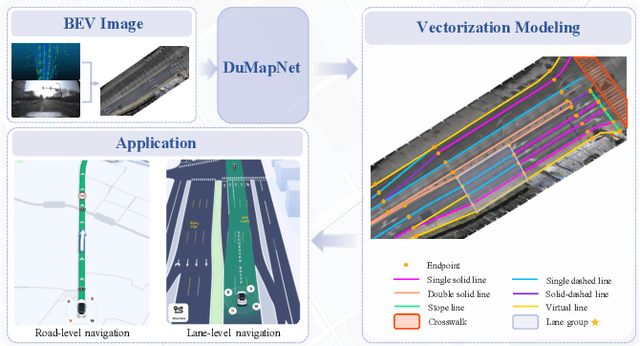
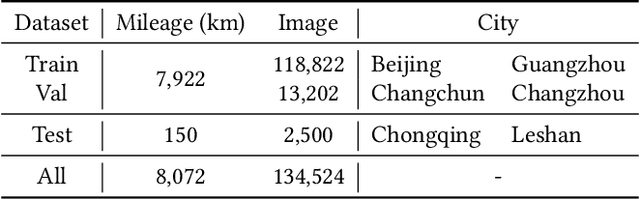
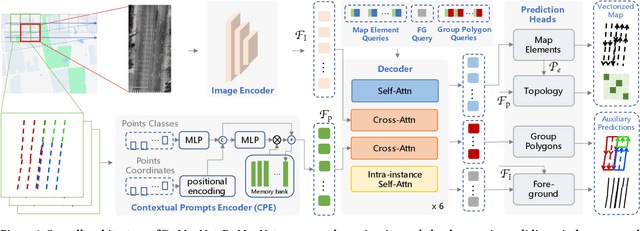
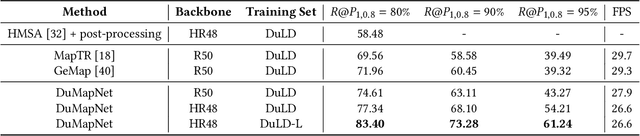
Generating city-scale lane-level maps faces significant challenges due to the intricate urban environments, such as blurred or absent lane markings. Additionally, a standard lane-level map requires a comprehensive organization of lane groupings, encompassing lane direction, style, boundary, and topology, yet has not been thoroughly examined in prior research. These obstacles result in labor-intensive human annotation and high maintenance costs. This paper overcomes these limitations and presents an industrial-grade solution named DuMapNet that outputs standardized, vectorized map elements and their topology in an end-to-end paradigm. To this end, we propose a group-wise lane prediction (GLP) system that outputs vectorized results of lane groups by meticulously tailoring a transformer-based network. Meanwhile, to enhance generalization in challenging scenarios, such as road wear and occlusions, as well as to improve global consistency, a contextual prompts encoder (CPE) module is proposed, which leverages the predicted results of spatial neighborhoods as contextual information. Extensive experiments conducted on large-scale real-world datasets demonstrate the superiority and effectiveness of DuMapNet. Additionally, DuMap-Net has already been deployed in production at Baidu Maps since June 2023, supporting lane-level map generation tasks for over 360 cities while bringing a 95% reduction in costs. This demonstrates that DuMapNet serves as a practical and cost-effective industrial solution for city-scale lane-level map generation.
An eight-neuron network for quadruped locomotion with hip-knee joint control
Jun 19, 2024The gait generator, which is capable of producing rhythmic signals for coordinating multiple joints, is an essential component in the quadruped robot locomotion control framework. The biological counterpart of the gait generator is the Central Pattern Generator (abbreviated as CPG), a small neural network consisting of interacting neurons. Inspired by this architecture, researchers have designed artificial neural networks composed of simulated neurons or oscillator equations. Despite the widespread application of these designed CPGs in various robot locomotion controls, some issues remain unaddressed, including: (1) Simplistic network designs often overlook the symmetry between signal and network structure, resulting in fewer gait patterns than those found in nature. (2) Due to minimal architectural consideration, quadruped control CPGs typically consist of only four neurons, which restricts the network's direct control to leg phases rather than joint coordination. (3) Gait changes are achieved by varying the neuron couplings or the assignment between neurons and legs, rather than through external stimulation. We apply symmetry theory to design an eight-neuron network, composed of Stein neuronal models, capable of achieving five gaits and coordinated control of the hip-knee joints. We validate the signal stability of this network as a gait generator through numerical simulations, which reveal various results and patterns encountered during gait transitions using neuronal stimulation. Based on these findings, we have developed several successful gait transition strategies through neuronal stimulations. Using a commercial quadruped robot model, we demonstrate the usability and feasibility of this network by implementing motion control and gait transitions.
FontGAN: A Unified Generative Framework for Chinese Character Stylization and De-stylization
Oct 28, 2019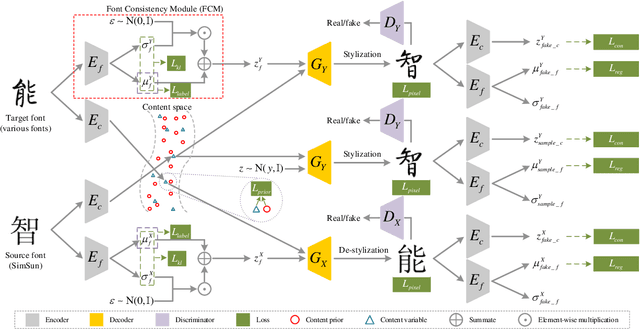

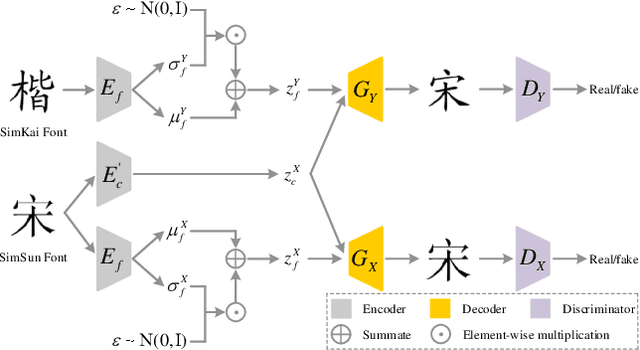
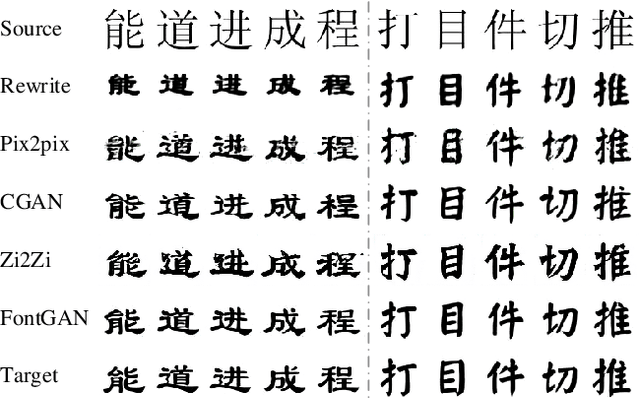
Chinese character synthesis involves two related aspects, i.e., style maintenance and content consistency. Although some methods have achieved remarkable success in synthesizing a character with specified style from standard font, how to map characters to a specified style domain without losing their identifiability remains very challenging. In this paper, we propose a novel model named FontGAN, which integrates the character stylization and de-stylization into a unified framework. In our model, we decouple character images into style representation and content representation, which facilitates more precise control of these two types of variables, thereby improving the quality of the generated results. We also introduce two modules, namely, font consistency module (FCM) and content prior module (CPM). FCM exploits a category guided Kullback-Leibler loss to embedding the style representation into different Gaussian distributions. It constrains the characters of the same font in the training set globally. On the other hand, it enables our model to obtain style variables through sampling in testing phase. CPM provides content prior for the model to guide the content encoding process and alleviates the problem of stroke deficiency during de-stylization. Extensive experimental results on character stylization and de-stylization have demonstrated the effectiveness of our method.