 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLDMapNet-U: An End-to-End System for City-Scale Lane-Level Map Updating
Jan 06, 2025



An up-to-date city-scale lane-level map is an indispensable infrastructure and a key enabling technology for ensuring the safety and user experience of autonomous driving systems. In industrial scenarios, reliance on manual annotation for map updates creates a critical bottleneck. Lane-level updates require precise change information and must ensure consistency with adjacent data while adhering to strict standards. Traditional methods utilize a three-stage approach-construction, change detection, and updating-which often necessitates manual verification due to accuracy limitations. This results in labor-intensive processes and hampers timely updates. To address these challenges, we propose LDMapNet-U, which implements a new end-to-end paradigm for city-scale lane-level map updating. By reconceptualizing the update task as an end-to-end map generation process grounded in historical map data, we introduce a paradigm shift in map updating that simultaneously generates vectorized maps and change information. To achieve this, a Prior-Map Encoding (PME) module is introduced to effectively encode historical maps, serving as a critical reference for detecting changes. Additionally, we incorporate a novel Instance Change Prediction (ICP) module that learns to predict associations with historical maps. Consequently, LDMapNet-U simultaneously achieves vectorized map element generation and change detection. To demonstrate the superiority and effectiveness of LDMapNet-U, extensive experiments are conducted using large-scale real-world datasets. In addition, LDMapNet-U has been successfully deployed in production at Baidu Maps since April 2024, supporting map updating for over 360 cities and significantly shortening the update cycle from quarterly to weekly. The updated maps serve hundreds of millions of users and are integrated into the autonomous driving systems of several leading vehicle companies.
DuMapNet: An End-to-End Vectorization System for City-Scale Lane-Level Map Generation
Jun 20, 2024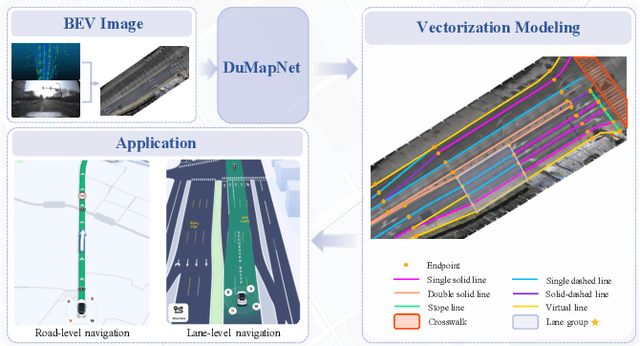
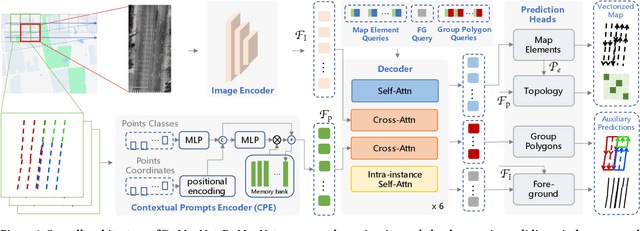
Generating city-scale lane-level maps faces significant challenges due to the intricate urban environments, such as blurred or absent lane markings. Additionally, a standard lane-level map requires a comprehensive organization of lane groupings, encompassing lane direction, style, boundary, and topology, yet has not been thoroughly examined in prior research. These obstacles result in labor-intensive human annotation and high maintenance costs. This paper overcomes these limitations and presents an industrial-grade solution named DuMapNet that outputs standardized, vectorized map elements and their topology in an end-to-end paradigm. To this end, we propose a group-wise lane prediction (GLP) system that outputs vectorized results of lane groups by meticulously tailoring a transformer-based network. Meanwhile, to enhance generalization in challenging scenarios, such as road wear and occlusions, as well as to improve global consistency, a contextual prompts encoder (CPE) module is proposed, which leverages the predicted results of spatial neighborhoods as contextual information. Extensive experiments conducted on large-scale real-world datasets demonstrate the superiority and effectiveness of DuMapNet. Additionally, DuMap-Net has already been deployed in production at Baidu Maps since June 2023, supporting lane-level map generation tasks for over 360 cities while bringing a 95% reduction in costs. This demonstrates that DuMapNet serves as a practical and cost-effective industrial solution for city-scale lane-level map generation.