 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Individual Intelligence: Surveying Collaboration, Failure Attribution, and Self-Evolution in LLM-based Multi-Agent Systems
May 14, 2026LLM-based autonomous agents have demonstrated strong capabilities in reasoning, planning, and tool use, yet remain limited when tasks require sustained coordination across roles, tools, and environments. Multi-agent systems address this through structured collaboration among specialized agents, but tighter coordination also amplifies a less explored risk: errors can propagate across agents and interaction rounds, producing failures that are difficult to diagnose and rarely translate into structural self-improvement. Existing surveys cover individual agent capabilities, multi-agent collaboration, or agent self-evolution separately, leaving the causal dependencies among them unexamined. This survey provides a unified review organized around four causally linked stages, which we term the LIFE progression: Lay the capability foundation, Integrate agents through collaboration, Find faults through attribution, and Evolve through autonomous self-improvement. For each stage, we provide systematic taxonomies and formally characterize the dependencies between adjacent stages, revealing how each stage both depends on and constrains the next. Beyond synthesizing existing work, we identify open challenges at stage boundaries and propose a cross-stage research agenda for closed-loop multi-agent systems capable of continuously diagnosing failures, reorganizing structures, and refining agent behaviors, extending current coordination frameworks toward more self-organizing forms of collective intelligence. By bridging these previously fragmented research threads, this survey aims to offer both a systematic reference and a conceptual roadmap toward autonomous, self-improving multi-agent intelligence.
Beyond Error-Based Optimization: Experience-Driven Symbolic Regression with Goal-Conditioned Reinforcement Learning
Jan 21, 2026Symbolic Regression aims to automatically identify compact and interpretable mathematical expressions that model the functional relationship between input and output variables. Most existing search-based symbolic regression methods typically rely on the fitting error to inform the search process. However, in the vast expression space, numerous candidate expressions may exhibit similar error values while differing substantially in structure, leading to ambiguous search directions and hindering convergence to the underlying true function. To address this challenge, we propose a novel framework named EGRL-SR (Experience-driven Goal-conditioned Reinforcement Learning for Symbolic Regression). In contrast to traditional error-driven approaches, EGRL-SR introduces a new perspective: leveraging precise historical trajectories and optimizing the action-value network to proactively guide the search process, thereby achieving a more robust expression search. Specifically, we formulate symbolic regression as a goal-conditioned reinforcement learning problem and incorporate hindsight experience replay, allowing the action-value network to generalize common mapping patterns from diverse input-output pairs. Moreover, we design an all-point satisfaction binary reward function that encourages the action-value network to focus on structural patterns rather than low-error expressions, and concurrently propose a structure-guided heuristic exploration strategy to enhance search diversity and space coverage. Experiments on public benchmarks show that EGRL-SR consistently outperforms state-of-the-art methods in recovery rate and robustness, and can recover more complex expressions under the same search budget. Ablation results validate that the action-value network effectively guides the search, with both the reward function and the exploration strategy playing critical roles.
ProSoftArena: Benchmarking Hierarchical Capabilities of Multimodal Agents in Professional Software Environments
Dec 30, 2025Multimodal agents are making rapid progress on general computer-use tasks, yet existing benchmarks remain largely confined to browsers and basic desktop applications, falling short in professional software workflows that dominate real-world scientific and industrial practice. To close this gap, we introduce ProSoftArena, a benchmark and platform specifically for evaluating multimodal agents in professional software environments. We establish the first capability hierarchy tailored to agent use of professional software and construct a benchmark of 436 realistic work and research tasks spanning 6 disciplines and 13 core professional applications. To ensure reliable and reproducible assessment, we build an executable real-computer environment with an execution-based evaluation framework and uniquely incorporate a human-in-the-loop evaluation paradigm. Extensive experiments show that even the best-performing agent attains only a 24.4\% success rate on L2 tasks and completely fails on L3 multi-software workflow. In-depth analysis further provides valuable insights for addressing current agent limitations and more effective design principles, paving the way to build more capable agents in professional software settings. This project is available at: https://prosoftarena.github.io.
Code-in-the-Loop Forensics: Agentic Tool Use for Image Forgery Detection
Dec 18, 2025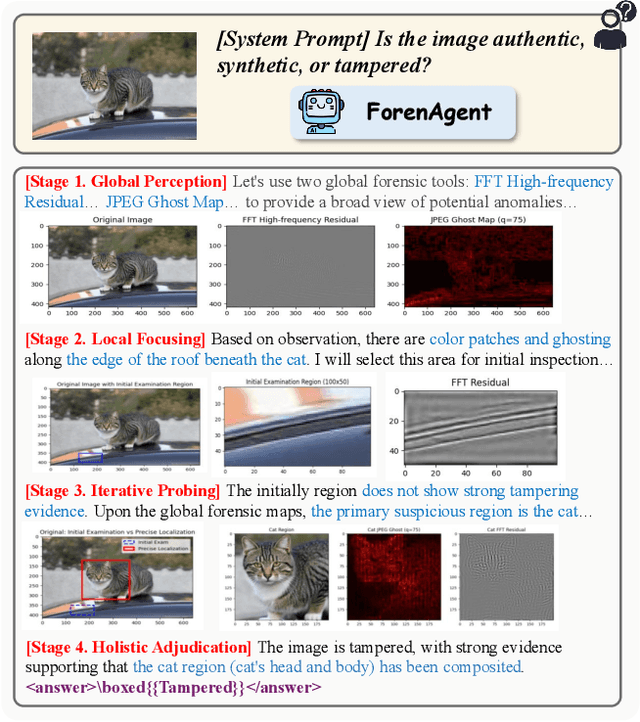
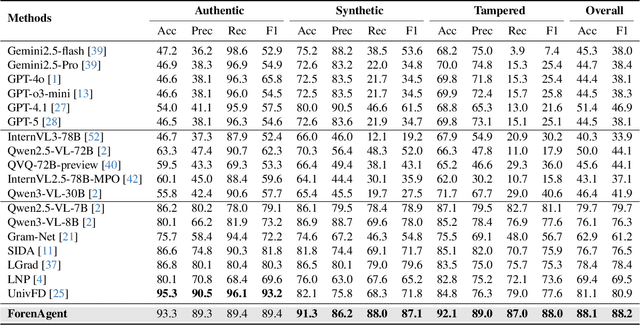
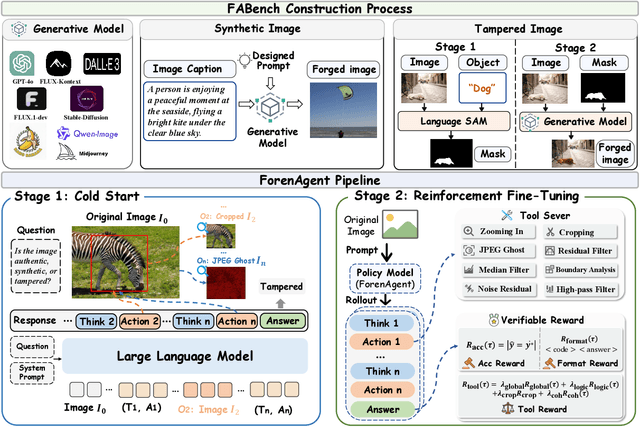
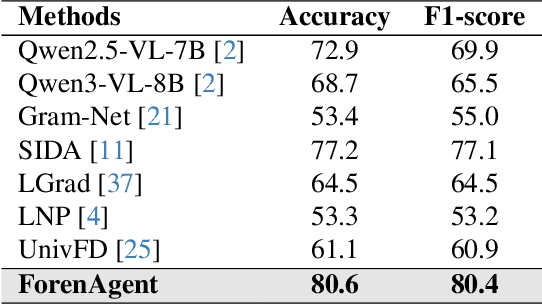
Existing image forgery detection (IFD) methods either exploit low-level, semantics-agnostic artifacts or rely on multimodal large language models (MLLMs) with high-level semantic knowledge. Although naturally complementary, these two information streams are highly heterogeneous in both paradigm and reasoning, making it difficult for existing methods to unify them or effectively model their cross-level interactions. To address this gap, we propose ForenAgent, a multi-round interactive IFD framework that enables MLLMs to autonomously generate, execute, and iteratively refine Python-based low-level tools around the detection objective, thereby achieving more flexible and interpretable forgery analysis. ForenAgent follows a two-stage training pipeline combining Cold Start and Reinforcement Fine-Tuning to enhance its tool interaction capability and reasoning adaptability progressively. Inspired by human reasoning, we design a dynamic reasoning loop comprising global perception, local focusing, iterative probing, and holistic adjudication, and instantiate it as both a data-sampling strategy and a task-aligned process reward. For systematic training and evaluation, we construct FABench, a heterogeneous, high-quality agent-forensics dataset comprising 100k images and approximately 200k agent-interaction question-answer pairs. Experiments show that ForenAgent exhibits emergent tool-use competence and reflective reasoning on challenging IFD tasks when assisted by low-level tools, charting a promising route toward general-purpose IFD. The code will be released after the review process is completed.
Dialogue as Discovery: Navigating Human Intent Through Principled Inquiry
Oct 31, 2025A fundamental bottleneck in human-AI collaboration is the "intention expression gap," the difficulty for humans to effectively convey complex, high-dimensional thoughts to AI. This challenge often traps users in inefficient trial-and-error loops and is exacerbated by the diverse expertise levels of users. We reframe this problem from passive instruction following to a Socratic collaboration paradigm, proposing an agent that actively probes for information to resolve its uncertainty about user intent. we name the proposed agent Nous, trained to acquire proficiency in this inquiry policy. The core mechanism of Nous is a training framework grounded in the first principles of information theory. Within this framework, we define the information gain from dialogue as an intrinsic reward signal, which is fundamentally equivalent to the reduction of Shannon entropy over a structured task space. This reward design enables us to avoid reliance on costly human preference annotations or external reward models. To validate our framework, we develop an automated simulation pipeline to generate a large-scale, preference-based dataset for the challenging task of scientific diagram generation. Comprehensive experiments, including ablations, subjective and objective evaluations, and tests across user expertise levels, demonstrate the effectiveness of our proposed framework. Nous achieves leading efficiency and output quality, while remaining robust to varying user expertise. Moreover, its design is domain-agnostic, and we show evidence of generalization beyond diagram generation. Experimental results prove that our work offers a principled, scalable, and adaptive paradigm for resolving uncertainty about user intent in complex human-AI collaboration.
From Pixels to Paths: A Multi-Agent Framework for Editable Scientific Illustration
Oct 31, 2025Scientific illustrations demand both high information density and post-editability. However, current generative models have two major limitations: Frist, image generation models output rasterized images lacking semantic structure, making it impossible to access, edit, or rearrange independent visual components in the images. Second, code-based generation methods (TikZ or SVG), although providing element-level control, force users into the cumbersome cycle of "writing-compiling-reviewing" and lack the intuitiveness of manipulation. Neither of these two approaches can well meet the needs for efficiency, intuitiveness, and iterative modification in scientific creation. To bridge this gap, we introduce VisPainter, a multi-agent framework for scientific illustration built upon the model context protocol. VisPainter orchestrates three specialized modules-a Manager, a Designer, and a Toolbox-to collaboratively produce diagrams compatible with standard vector graphics software. This modular, role-based design allows each element to be explicitly represented and manipulated, enabling true element-level control and any element can be added and modified later. To systematically evaluate the quality of scientific illustrations, we introduce VisBench, a benchmark with seven-dimensional evaluation metrics. It assesses high-information-density scientific illustrations from four aspects: content, layout, visual perception, and interaction cost. To this end, we conducted extensive ablation experiments to verify the rationality of our architecture and the reliability of our evaluation methods. Finally, we evaluated various vision-language models, presenting fair and credible model rankings along with detailed comparisons of their respective capabilities. Additionally, we isolated and quantified the impacts of role division, step control,and description on the quality of illustrations.
MDK12-Bench: A Comprehensive Evaluation of Multimodal Large Language Models on Multidisciplinary Exams
Aug 09, 2025Multimodal large language models (MLLMs), which integrate language and visual cues for problem-solving, are crucial for advancing artificial general intelligence (AGI). However, current benchmarks for measuring the intelligence of MLLMs suffer from limited scale, narrow coverage, and unstructured knowledge, offering only static and undifferentiated evaluations. To bridge this gap, we introduce MDK12-Bench, a large-scale multidisciplinary benchmark built from real-world K-12 exams spanning six disciplines with 141K instances and 6,225 knowledge points organized in a six-layer taxonomy. Covering five question formats with difficulty and year annotations, it enables comprehensive evaluation to capture the extent to which MLLMs perform over four dimensions: 1) difficulty levels, 2) temporal (cross-year) shifts, 3) contextual shifts, and 4) knowledge-driven reasoning. We propose a novel dynamic evaluation framework that introduces unfamiliar visual, textual, and question form shifts to challenge model generalization while improving benchmark objectivity and longevity by mitigating data contamination. We further evaluate knowledge-point reference-augmented generation (KP-RAG) to examine the role of knowledge in problem-solving. Key findings reveal limitations in current MLLMs in multiple aspects and provide guidance for enhancing model robustness, interpretability, and AI-assisted education.
Sekai: A Video Dataset towards World Exploration
Jun 18, 2025Video generation techniques have made remarkable progress, promising to be the foundation of interactive world exploration. However, existing video generation datasets are not well-suited for world exploration training as they suffer from some limitations: limited locations, short duration, static scenes, and a lack of annotations about exploration and the world. In this paper, we introduce Sekai (meaning ``world'' in Japanese), a high-quality first-person view worldwide video dataset with rich annotations for world exploration. It consists of over 5,000 hours of walking or drone view (FPV and UVA) videos from over 100 countries and regions across 750 cities. We develop an efficient and effective toolbox to collect, pre-process and annotate videos with location, scene, weather, crowd density, captions, and camera trajectories. Experiments demonstrate the quality of the dataset. And, we use a subset to train an interactive video world exploration model, named YUME (meaning ``dream'' in Japanese). We believe Sekai will benefit the area of video generation and world exploration, and motivate valuable applications.
A High-Quality Dataset and Reliable Evaluation for Interleaved Image-Text Generation
Jun 11, 2025Recent advancements in Large Multimodal Models (LMMs) have significantly improved multimodal understanding and generation. However, these models still struggle to generate tightly interleaved image-text outputs, primarily due to the limited scale, quality and instructional richness of current training datasets. To address this, we introduce InterSyn, a large-scale multimodal dataset constructed using our Self-Evaluation with Iterative Refinement (SEIR) method. InterSyn features multi-turn, instruction-driven dialogues with tightly interleaved imagetext responses, providing rich object diversity and rigorous automated quality refinement, making it well-suited for training next-generation instruction-following LMMs. Furthermore, to address the lack of reliable evaluation tools capable of assessing interleaved multimodal outputs, we introduce SynJudge, an automatic evaluation model designed to quantitatively assess multimodal outputs along four dimensions: text content, image content, image quality, and image-text synergy. Experimental studies show that the SEIR method leads to substantially higher dataset quality compared to an otherwise identical process without refinement. Moreover, LMMs trained on InterSyn achieve uniform performance gains across all evaluation metrics, confirming InterSyn's utility for advancing multimodal systems.
SridBench: Benchmark of Scientific Research Illustration Drawing of Image Generation Model
May 28, 2025Recent years have seen rapid advances in AI-driven image generation. Early diffusion models emphasized perceptual quality, while newer multimodal models like GPT-4o-image integrate high-level reasoning, improving semantic understanding and structural composition. Scientific illustration generation exemplifies this evolution: unlike general image synthesis, it demands accurate interpretation of technical content and transformation of abstract ideas into clear, standardized visuals. This task is significantly more knowledge-intensive and laborious, often requiring hours of manual work and specialized tools. Automating it in a controllable, intelligent manner would provide substantial practical value. Yet, no benchmark currently exists to evaluate AI on this front. To fill this gap, we introduce SridBench, the first benchmark for scientific figure generation. It comprises 1,120 instances curated from leading scientific papers across 13 natural and computer science disciplines, collected via human experts and MLLMs. Each sample is evaluated along six dimensions, including semantic fidelity and structural accuracy. Experimental results reveal that even top-tier models like GPT-4o-image lag behind human performance, with common issues in text/visual clarity and scientific correctness. These findings highlight the need for more advanced reasoning-driven visual generation capabilities.