 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Error Adjustment: Theory and Practice of Balancing Individual Performance and Diversity in Ensemble Learning
Aug 07, 2025Ensemble learning boosts performance by aggregating predictions from multiple base learners. A core challenge is balancing individual learner accuracy with diversity. Traditional methods like Bagging and Boosting promote diversity through randomness but lack precise control over the accuracy-diversity trade-off. Negative Correlation Learning (NCL) introduces a penalty to manage this trade-off but suffers from loose theoretical bounds and limited adjustment range. To overcome these limitations, we propose a novel framework called Self-Error Adjustment (SEA), which decomposes ensemble errors into two distinct components: individual performance terms, representing the self-error of each base learner, and diversity terms, reflecting interactions among learners. This decomposition allows us to introduce an adjustable parameter into the loss function, offering precise control over the contribution of each component, thus enabling finer regulation of ensemble performance. Compared to NCL and its variants, SEA provides a broader range of effective adjustments and more consistent changes in diversity. Furthermore, we establish tighter theoretical bounds for adjustable ensemble methods and validate them through empirical experiments. Experimental results on several public regression and classification datasets demonstrate that SEA consistently outperforms baseline methods across all tasks. Ablation studies confirm that SEA offers more flexible adjustment capabilities and superior performance in fine-tuning strategies.
Gradual Vigilance and Interval Communication: Enhancing Value Alignment in Multi-Agent Debates
Dec 18, 2024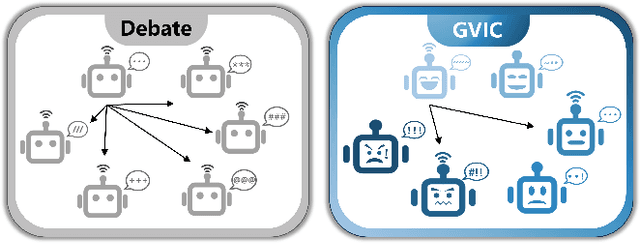
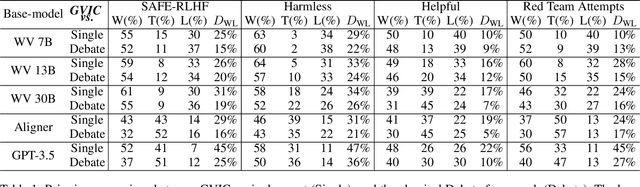
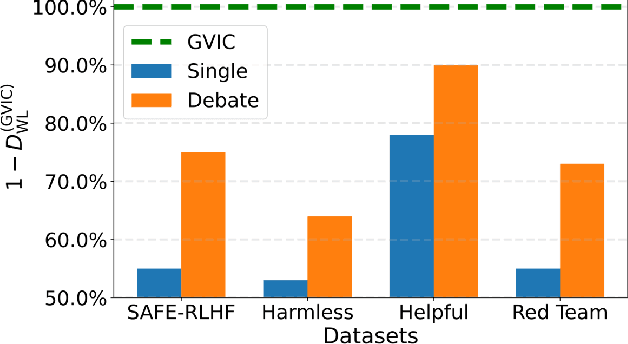
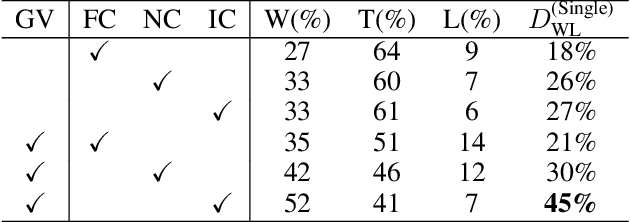
In recent years, large language models have shown exceptional performance in fulfilling diverse human needs. However, their training data can introduce harmful content, underscoring the necessity for robust value alignment. Mainstream methods, which depend on feedback learning and supervised training, are resource-intensive and may constrain the full potential of the models. Multi-Agent Debate (MAD) offers a more efficient and innovative solution by enabling the generation of reliable answers through agent interactions. To apply MAD to value alignment, we examine the relationship between the helpfulness and harmlessness of debate outcomes and individual responses, and propose a MAD based framework Gradual Vigilance and Interval Communication (GVIC). GVIC allows agents to assess risks with varying levels of vigilance and to exchange diverse information through interval communication. We theoretically prove that GVIC optimizes debate efficiency while reducing communication overhead. Experimental results demonstrate that GVIC consistently outperforms baseline methods across various tasks and datasets, particularly excelling in harmfulness mitigation and fraud prevention. Additionally, GVIC exhibits strong adaptability across different base model sizes, including both unaligned and aligned models, and across various task types.
YAYI 2: Multilingual Open-Source Large Language Models
Dec 22, 2023As the latest advancements in natural language processing, large language models (LLMs) have achieved human-level language understanding and generation abilities in many real-world tasks, and even have been regarded as a potential path to the artificial general intelligence. To better facilitate research on LLMs, many open-source LLMs, such as Llama 2 and Falcon, have recently been proposed and gained comparable performances to proprietary models. However, these models are primarily designed for English scenarios and exhibit poor performances in Chinese contexts. In this technical report, we propose YAYI 2, including both base and chat models, with 30 billion parameters. YAYI 2 is pre-trained from scratch on a multilingual corpus which contains 2.65 trillion tokens filtered by our pre-training data processing pipeline. The base model is aligned with human values through supervised fine-tuning with millions of instructions and reinforcement learning from human feedback. Extensive experiments on multiple benchmarks, such as MMLU and CMMLU, consistently demonstrate that the proposed YAYI 2 outperforms other similar sized open-source models.
Multiplayer Homicidal Chauffeur Reach-Avoid Games: A Pursuit Enclosure Function Approach
Nov 04, 2023This paper presents a multiplayer Homicidal Chauffeur reach-avoid differential game, which involves Dubins-car pursuers and simple-motion evaders. The goal of the pursuers is to cooperatively protect a planar convex region from the evaders, who strive to reach the region. We propose a cooperative strategy for the pursuers based on subgames for multiple pursuers against one evader and optimal task allocation. We introduce pursuit enclosure functions (PEFs) and propose a new enclosure region pursuit (ERP) winning approach that supports forward analysis for the strategy synthesis in the subgames. We show that if a pursuit coalition is able to defend the region against an evader under the ERP winning, then no more than two pursuers in the coalition are necessarily needed. We also propose a steer-to-ERP approach to certify the ERP winning and synthesize the ERP winning strategy. To implement the strategy, we introduce a positional PEF and provide the necessary parameters, states, and strategies that ensure the ERP winning for both one pursuer and two pursuers against one evader. Additionally, we formulate a binary integer program using the subgame outcomes to maximize the captured evaders in the ERP winning for the pursuit task allocation. Finally, we propose a multiplayer receding-horizon strategy where the ERP winnings are checked in each horizon, the task is allocated, and the strategies of the pursuers are determined. Numerical examples are provided to illustrate the results.
Towards a Framework for Tracking Multiple Targets: Hybrid Systems meets Computational Geometry
Nov 15, 2016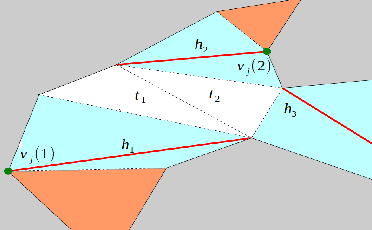


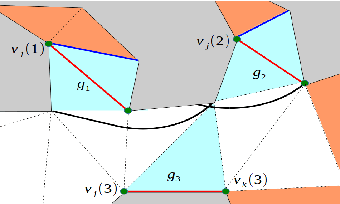
We investigate a variation of the art gallery problem in which a team of mobile guards tries to track an unpredictable intruder in a simply-connected polygonal environment. In this work, we use the deployment strategy for diagonal guards originally proposed in [1]. The guards are confined to move along the diagonals of a polygon and the intruder can move freely within the environment. We define critical regions to generate event-triggered strategies for the guards. We design a hybrid automaton based on the critical regions to model the tracking problem. Based on reachability analysis, we provide necessary and sufficient conditions for tracking in terms of the maximal controlled invariant set of the hybrid system. We express these conditions in terms of the critical curves to find sufficient conditions for n/4 guards to track the mobile intruder using the reachability analysis.