 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCertificated Actor-Critic: Hierarchical Reinforcement Learning with Control Barrier Functions for Safe Navigation
Jan 29, 2025Control Barrier Functions (CBFs) have emerged as a prominent approach to designing safe navigation systems of robots. Despite their popularity, current CBF-based methods exhibit some limitations: optimization-based safe control techniques tend to be either myopic or computationally intensive, and they rely on simplified system models; conversely, the learning-based methods suffer from the lack of quantitative indication in terms of navigation performance and safety. In this paper, we present a new model-free reinforcement learning algorithm called Certificated Actor-Critic (CAC), which introduces a hierarchical reinforcement learning framework and well-defined reward functions derived from CBFs. We carry out theoretical analysis and proof of our algorithm, and propose several improvements in algorithm implementation. Our analysis is validated by two simulation experiments, showing the effectiveness of our proposed CAC algorithm.
Humanoid Locomotion and Manipulation: Current Progress and Challenges in Control, Planning, and Learning
Jan 03, 2025



Humanoid robots have great potential to perform various human-level skills. These skills involve locomotion, manipulation, and cognitive capabilities. Driven by advances in machine learning and the strength of existing model-based approaches, these capabilities have progressed rapidly, but often separately. Therefore, a timely overview of current progress and future trends in this fast-evolving field is essential. This survey first summarizes the model-based planning and control that have been the backbone of humanoid robotics for the past three decades. We then explore emerging learning-based methods, with a focus on reinforcement learning and imitation learning that enhance the versatility of loco-manipulation skills. We examine the potential of integrating foundation models with humanoid embodiments, assessing the prospects for developing generalist humanoid agents. In addition, this survey covers emerging research for whole-body tactile sensing that unlocks new humanoid skills that involve physical interactions. The survey concludes with a discussion of the challenges and future trends.
AttriReBoost: A Gradient-Free Propagation Optimization Method for Cold Start Mitigation in Attribute Missing Graphs
Jan 01, 2025



Missing attribute issues are prevalent in the graph learning, leading to biased outcomes in Graph Neural Networks (GNNs). Existing methods that rely on feature propagation are prone to cold start problem, particularly when dealing with attribute resetting and low-degree nodes, which hinder effective propagation and convergence. To address these challenges, we propose AttriReBoost (ARB), a novel method that incorporates propagation-based method to mitigate cold start problems in attribute-missing graphs. ARB enhances global feature propagation by redefining initial boundary conditions and strategically integrating virtual edges, thereby improving node connectivity and ensuring more stable and efficient convergence. This method facilitates gradient-free attribute reconstruction with lower computational overhead. The proposed method is theoretically grounded, with its convergence rigorously established. Extensive experiments on several real-world benchmark datasets demonstrate the effectiveness of ARB, achieving an average accuracy improvement of 5.11% over state-of-the-art methods. Additionally, ARB exhibits remarkable computational efficiency, processing a large-scale graph with 2.49 million nodes in just 16 seconds on a single GPU. Our code is available at https://github.com/limengran98/ARB.
Safety-critical Control with Control Barrier Functions: A Hierarchical Optimization Framework
Oct 21, 2024

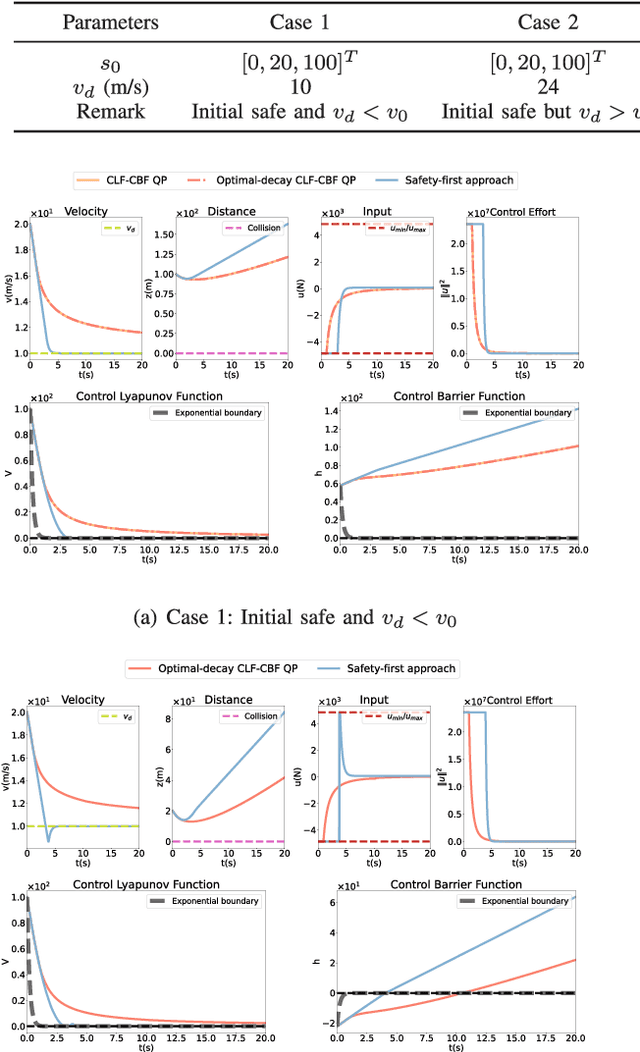
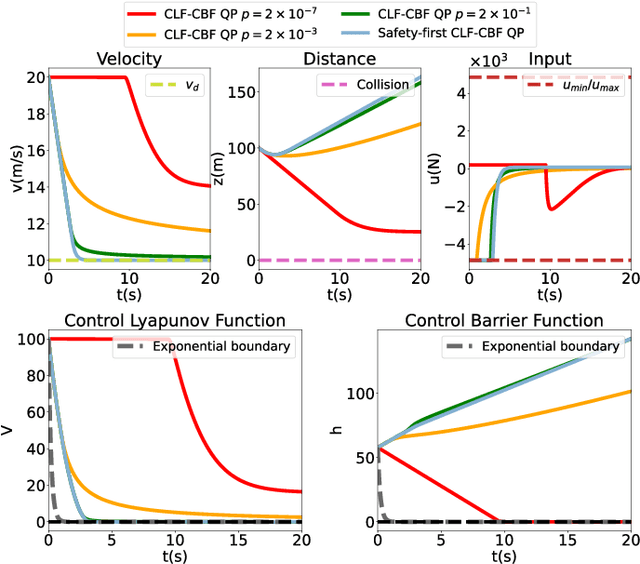
The control barrier function (CBF) has become a fundamental tool in safety-critical systems design since its invention. Typically, the quadratic optimization framework is employed to accommodate CBFs, control Lyapunov functions (CLFs), other constraints and nominal control design. However, the constrained optimization framework involves hyper-parameters to tradeoff different objectives and constraints, which, if not well-tuned beforehand, impact system performance and even lead to infeasibility. In this paper, we propose a hierarchical optimization framework that decomposes the multi-objective optimization problem into nested optimization sub-problems in a safety-first approach. The new framework addresses potential infeasibility on the premise of ensuring safety and performance as much as possible and applies easily in multi-certificate cases. With vivid visualization aids, we systematically analyze the advantages of our proposed method over existing QP-based ones in terms of safety, feasibility and convergence rates. Moreover, two numerical examples are provided that verify our analysis and show the superiority of our proposed method.
Characterising User Transfer Amid Industrial Resource Variation: A Bayesian Nonparametric Approach
Sep 25, 2023In a multitude of industrial fields, a key objective entails optimising resource management whilst satisfying user requirements. Resource management by industrial practitioners can result in a passive transfer of user loads across resource providers, a phenomenon whose accurate characterisation is both challenging and crucial. This research reveals the existence of user clusters, which capture macro-level user transfer patterns amid resource variation. We then propose CLUSTER, an interpretable hierarchical Bayesian nonparametric model capable of automating cluster identification, and thereby predicting user transfer in response to resource variation. Furthermore, CLUSTER facilitates uncertainty quantification for further reliable decision-making. Our method enables privacy protection by functioning independently of personally identifiable information. Experiments with simulated and real-world data from the communications industry reveal a pronounced alignment between prediction results and empirical observations across a spectrum of resource management scenarios. This research establishes a solid groundwork for advancing resource management strategy development.
Representation Separation for Semantic Segmentation with Vision Transformers
Dec 28, 2022Vision transformers (ViTs) encoding an image as a sequence of patches bring new paradigms for semantic segmentation.We present an efficient framework of representation separation in local-patch level and global-region level for semantic segmentation with ViTs. It is targeted for the peculiar over-smoothness of ViTs in semantic segmentation, and therefore differs from current popular paradigms of context modeling and most existing related methods reinforcing the advantage of attention. We first deliver the decoupled two-pathway network in which another pathway enhances and passes down local-patch discrepancy complementary to global representations of transformers. We then propose the spatially adaptive separation module to obtain more separate deep representations and the discriminative cross-attention which yields more discriminative region representations through novel auxiliary supervisions. The proposed methods achieve some impressive results: 1) incorporated with large-scale plain ViTs, our methods achieve new state-of-the-art performances on five widely used benchmarks; 2) using masked pre-trained plain ViTs, we achieve 68.9% mIoU on Pascal Context, setting a new record; 3) pyramid ViTs integrated with the decoupled two-pathway network even surpass the well-designed high-resolution ViTs on Cityscapes; 4) the improved representations by our framework have favorable transferability in images with natural corruptions. The codes will be released publicly.
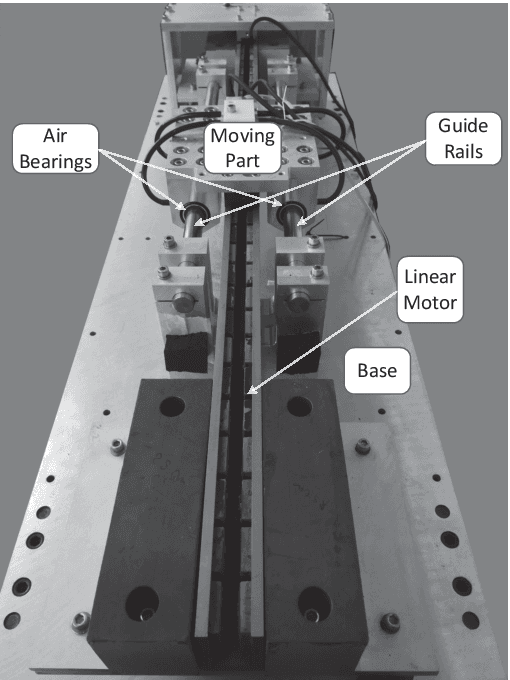
Practical Fractional-Order Variable-Gain Super-Twisting Control with Application to Wafer Stages of Photolithography Systems
Feb 06, 2021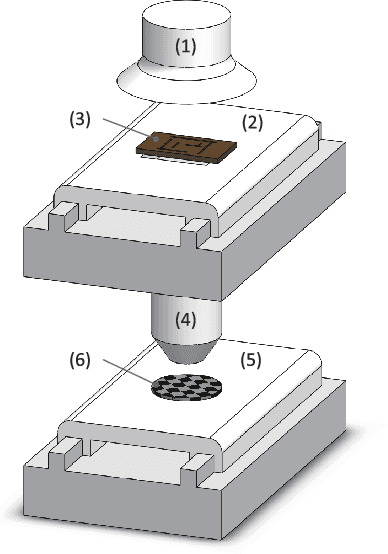
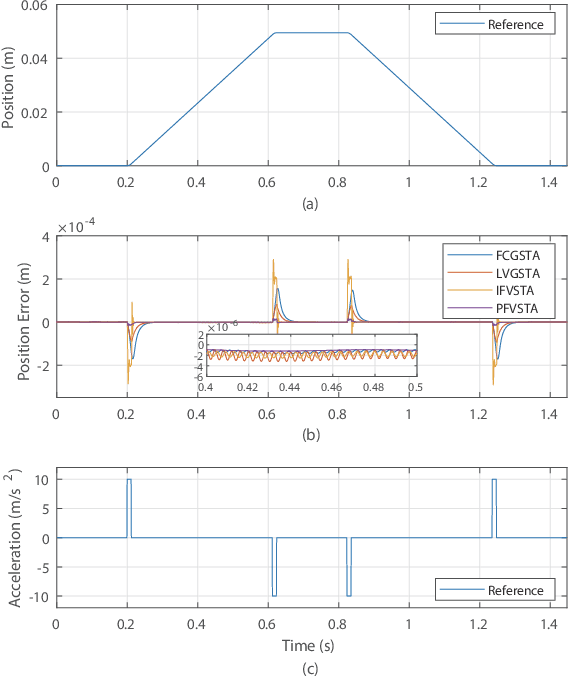
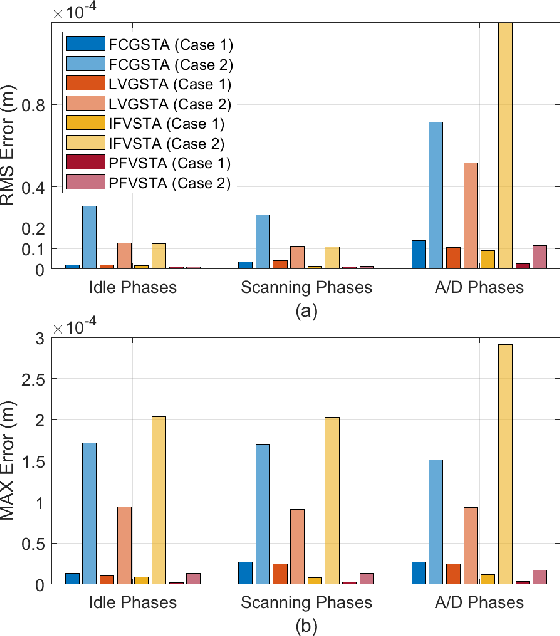
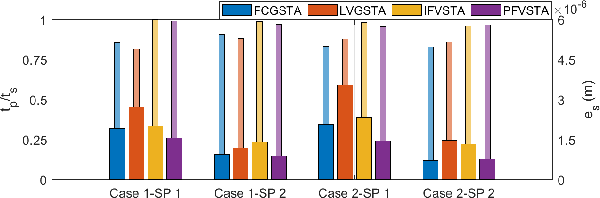
In this paper, a practical fractional-order variable-gain super-twisting algorithm (PFVSTA) is proposed to improve the tracking performance of wafer stages for semiconductor manufacturing. Based on the sliding mode control (SMC), the proposed PFVSTA enhances the tracking performance from three aspects: 1) alleviating the chattering phenomenon via super-twisting algorithm and a novel fractional-order sliding surface~(FSS) design, 2) improving the dynamics of states on the sliding surface with fast response and small overshoots via the designed novel FSS and 3) compensating for disturbances via variable-gain control law. Based on practical conditions, this paper analyzes the stability of the controller and illustrates the theoretical principle to compensate for the uncertainties caused by accelerations. Moreover, numerical simulations prove the effectiveness of the proposed sliding surface and control scheme, and they are in agreement with the theoretical analysis. Finally, practice-based comparative experiments are conducted. The results show that the proposed PFVSTA can achieve much better tracking performance than the conventional methods from various perspectives.
Feedback-based Digital Higher-order Terminal Sliding Mode for 6-DOF Industrial Manipulators
Feb 06, 2021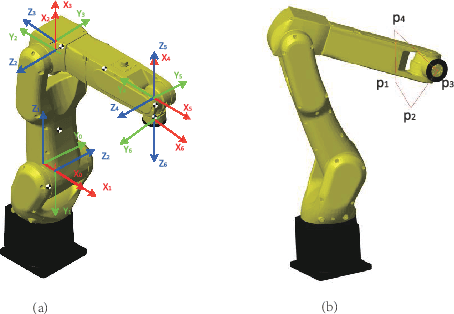
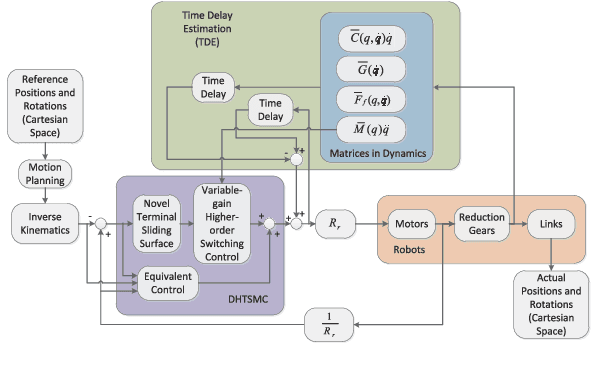
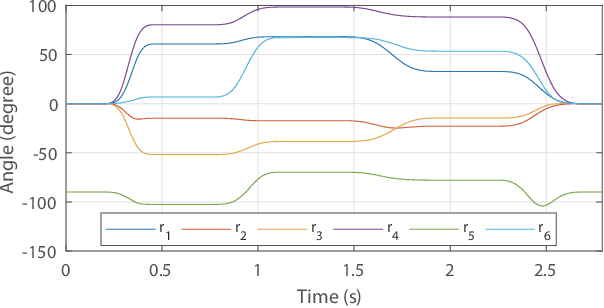
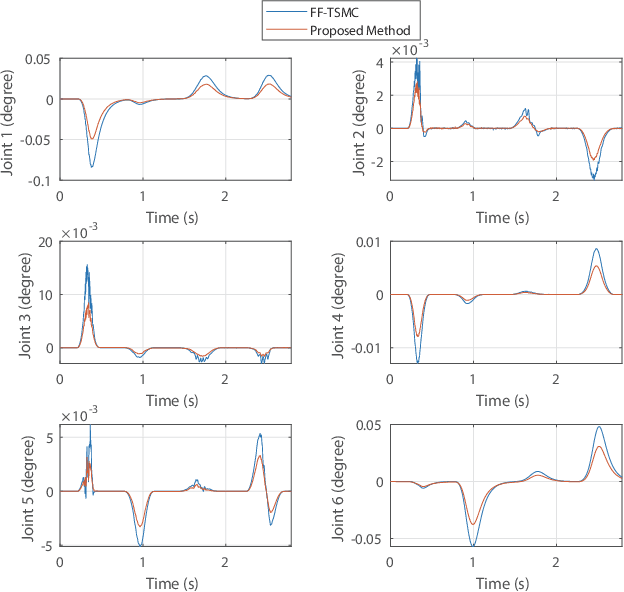
The precise motion control of a multi-degree of freedom~(DOF) robot manipulator is always challenging due to its nonlinear dynamics, disturbances, and uncertainties. Because most manipulators are controlled by digital signals, a novel higher-order sliding mode controller in the discrete-time form with time delay estimation is proposed in this paper. The dynamic model of the manipulator used in the design allows proper handling of nonlinearities, uncertainties and disturbances involved in the problem. Specifically, parametric uncertainties and disturbances are handled by the time delay estimation and the nonlinearity of the manipulator is addressed by the feedback structure of the controller. The combination of terminal sliding mode surface and higher-order control scheme in the controller guarantees a fast response with a small chattering amplitude. Moreover, the controller is designed with a modified sliding mode surface and variable-gain structure, so that the performance of the controller is further enhanced. We also analyze the condition to guarantee the stability of the closed-loop system in this paper. Finally, the simulation and experimental results prove that the proposed control scheme has a precise performance in a robot manipulator system.
Precise Motion Control of Wafer Stages via Adaptive Neural Network and Fractional-Order Super-Twisting Algorithm
Jan 31, 2021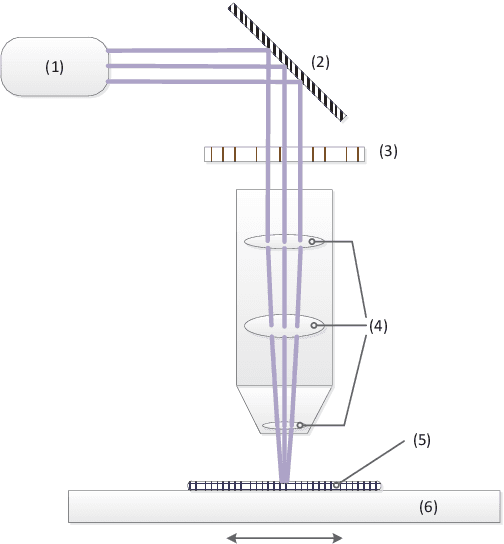
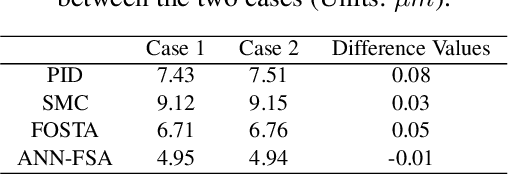
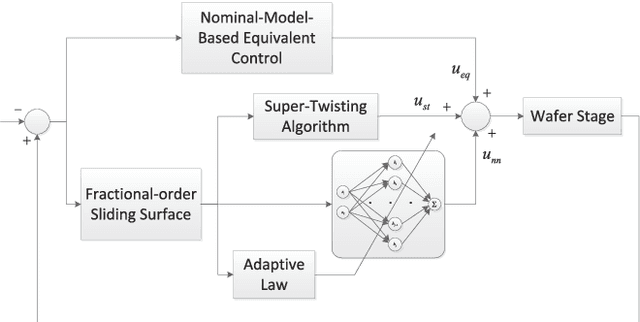
To obtain precise motion control of wafer stages, an adaptive neural network and fractional-order super-twisting control strategy is proposed. Based on sliding mode control (SMC), the proposed controller aims to address two challenges in SMC: 1) reducing the chattering phenomenon, and 2) attenuating the influence of model uncertainties and disturbances. For the first challenge, a fractional-order terminal sliding mode surface and a super-twisting algorithm are integrated into the SMC design. To attenuate uncertainties and disturbances, an add-on control structure based on the radial basis function (RBF) neural network is introduced. Stability analysis of the closed-loop control system is provided. Finally, experiments on a wafer stage testbed system are conducted, which proves that the proposed controller can robustly improve the tracking performance in the presence of uncertainties and disturbances compared to conventional and previous controllers.
Monocular 3D Object Detection with Sequential Feature Association and Depth Hint Augmentation
Dec 02, 2020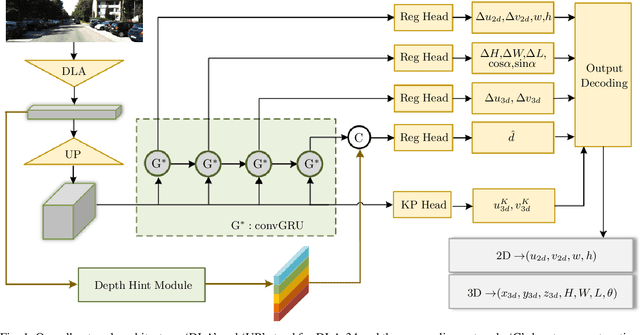

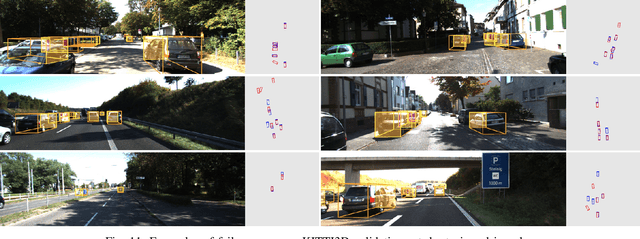
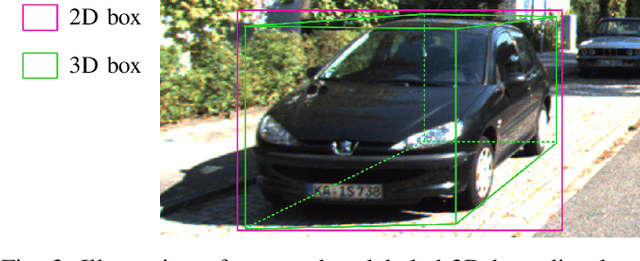
Monocular 3D object detection is a promising research topic for the intelligent perception systems of autonomous driving. In this work, a single-stage keypoint-based network, named as FADNet, is presented to address the task of monocular 3D object detection. In contrast to previous keypoint-based methods which adopt identical layouts for output branches, we propose to divide the output modalities into different groups according to the estimating difficulty, whereby different groups are treated differently by sequential feature association. Another contribution of this work is the strategy of depth hint augmentation. To provide characterized depth patterns as hints for depth estimation, a dedicated depth hint module is designed to generate row-wise features named as depth hints, which are explicitly supervised in a bin-wise manner. In the training stage, the regression outputs are uniformly encoded to enable loss disentanglement. The 2D loss term is further adapted to be depth-aware for improving the detection accuracy of small objects. The contributions of this work are validated by conducting experiments and ablation study on the KITTI benchmark. Without utilizing depth priors, post optimization, or other refinement modules, our network performs competitively against state-of-the-art methods while maintaining a decent running speed.