 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonocular 3D Object Detection with Sequential Feature Association and Depth Hint Augmentation
Dec 02, 2020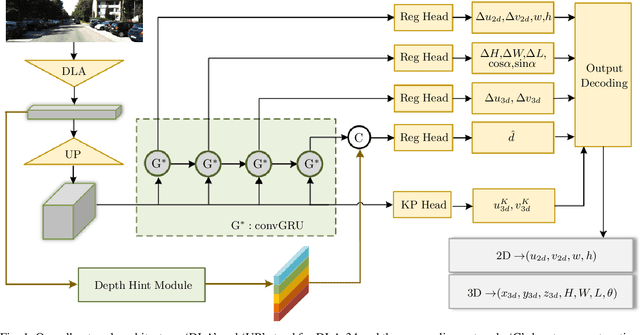

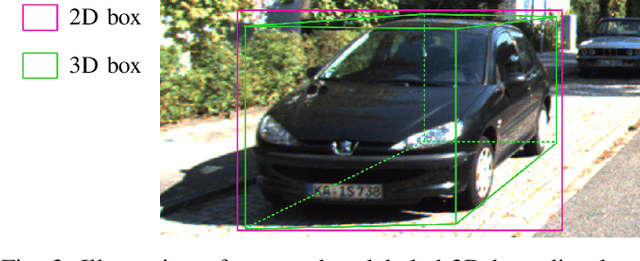
Monocular 3D object detection is a promising research topic for the intelligent perception systems of autonomous driving. In this work, a single-stage keypoint-based network, named as FADNet, is presented to address the task of monocular 3D object detection. In contrast to previous keypoint-based methods which adopt identical layouts for output branches, we propose to divide the output modalities into different groups according to the estimating difficulty, whereby different groups are treated differently by sequential feature association. Another contribution of this work is the strategy of depth hint augmentation. To provide characterized depth patterns as hints for depth estimation, a dedicated depth hint module is designed to generate row-wise features named as depth hints, which are explicitly supervised in a bin-wise manner. In the training stage, the regression outputs are uniformly encoded to enable loss disentanglement. The 2D loss term is further adapted to be depth-aware for improving the detection accuracy of small objects. The contributions of this work are validated by conducting experiments and ablation study on the KITTI benchmark. Without utilizing depth priors, post optimization, or other refinement modules, our network performs competitively against state-of-the-art methods while maintaining a decent running speed.
A CRF-based Framework for Tracklet Inactivation in Online Multi-Object Tracking
Nov 30, 2020


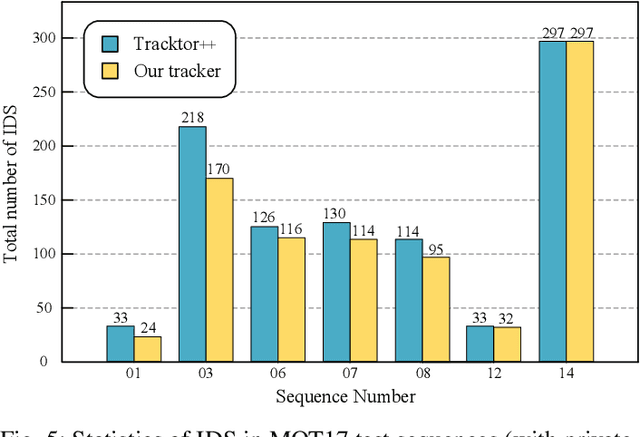
Online multi-object tracking (MOT) is an active research topic in the domain of computer vision. In this paper, a CRF-based framework is put forward to tackle the tracklet inactivation issues in online MOT problems. We apply the proposed framework to one of the state-of-the-art online MOT trackers, Tracktor++. The baseline algorithm for online MOT has the drawback of simple strategy on tracklet inactivation, which relies merely on tracking hypotheses' classification scores partitioned by using a fixed threshold. To overcome such a drawback, a discrete conditional random field (CRF) is developed to exploit the intra-frame relationship between tracking hypotheses. Separate sets of feature functions are designed for the unary and binary terms in the CRF so as to cope with various challenges in practical situations. The hypothesis filtering and dummy nodes techniques are employed to handle the problem of varying CRF nodes in the MOT context. In this paper, the inference of CRF is achieved by using the loopy belief propagation algorithm, and the parameters of the CRF are determined by utilizing the maximum likelihood estimation method. Experimental results demonstrate that the developed tracker with our CRF-based framework outperforms the baseline on the MOT16 and MOT17 datasets. The extensibility of the proposed method is further validated by an extensive experiment.