 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWOD-E2E: Waymo Open Dataset for End-to-End Driving in Challenging Long-tail Scenarios
Oct 30, 2025Vision-based end-to-end (E2E) driving has garnered significant interest in the research community due to its scalability and synergy with multimodal large language models (MLLMs). However, current E2E driving benchmarks primarily feature nominal scenarios, failing to adequately test the true potential of these systems. Furthermore, existing open-loop evaluation metrics often fall short in capturing the multi-modal nature of driving or effectively evaluating performance in long-tail scenarios. To address these gaps, we introduce the Waymo Open Dataset for End-to-End Driving (WOD-E2E). WOD-E2E contains 4,021 driving segments (approximately 12 hours), specifically curated for challenging long-tail scenarios that that are rare in daily life with an occurring frequency of less than 0.03%. Concretely, each segment in WOD-E2E includes the high-level routing information, ego states, and 360-degree camera views from 8 surrounding cameras. To evaluate the E2E driving performance on these long-tail situations, we propose a novel open-loop evaluation metric: Rater Feedback Score (RFS). Unlike conventional metrics that measure the distance between predicted way points and the logs, RFS measures how closely the predicted trajectory matches rater-annotated trajectory preference labels. We have released rater preference labels for all WOD-E2E validation set segments, while the held out test set labels have been used for the 2025 WOD-E2E Challenge. Through our work, we aim to foster state of the art research into generalizable, robust, and safe end-to-end autonomous driving agents capable of handling complex real-world situations.
Outracing Human Racers with Model-based Autonomous Racing
Nov 17, 2022



Autonomous racing has become a popular sub-topic of autonomous driving in recent years. The goal of autonomous racing research is to develop software to control the vehicle at its limit of handling and achieve human-level racing performance. In this work, we investigate how to approach human expert-level racing performance with model-based planning and control methods using the high-fidelity racing simulator Gran Turismo Sport (GTS). GTS enables a unique opportunity for autonomous racing research, as many recordings of racing from highly skilled human players can served as expert emonstrations. By comparing the performance of the autonomous racing software with human experts, we better understand the performance gap of existing software and explore new methodologies in a principled manner. In particular, we focus on the commonly adopted model-based racing framework, consisting of an offline trajectory planner and an online Model Predictive Control-based (MPC) tracking controller. We thoroughly investigate the design challenges from three perspective, namely vehicle model, planning algorithm, and controller design, and propose novel solutions to improve the baseline approach toward human expert-level performance. We showed that the proposed control framework can achieve top 0.95% lap time among human-expert players in GTS. Furthermore, we conducted comprehensive ablation studies to validate the necessity of proposed modules, and pointed out potential future directions to reach human-best performance.
CausalAgents: A Robustness Benchmark for Motion Forecasting using Causal Relationships
Jul 07, 2022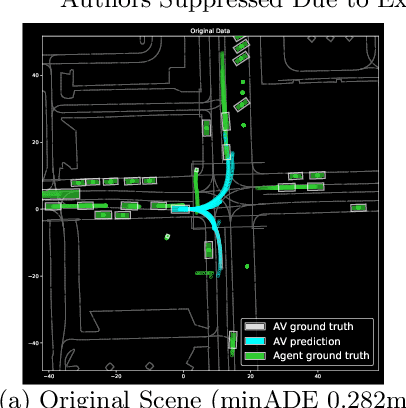

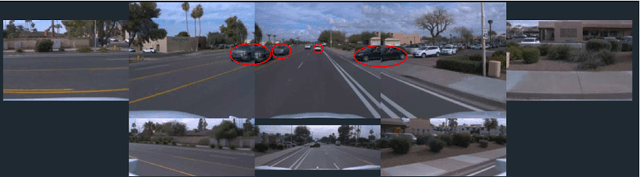
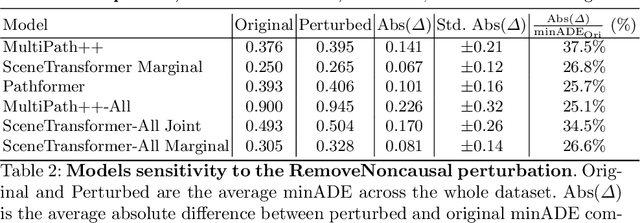
As machine learning models become increasingly prevalent in motion forecasting systems for autonomous vehicles (AVs), it is critical that we ensure that model predictions are safe and reliable. However, exhaustively collecting and labeling the data necessary to fully test the long tail of rare and challenging scenarios is difficult and expensive. In this work, we construct a new benchmark for evaluating and improving model robustness by applying perturbations to existing data. Specifically, we conduct an extensive labeling effort to identify causal agents, or agents whose presence influences human driver behavior in any way, in the Waymo Open Motion Dataset (WOMD), and we use these labels to perturb the data by deleting non-causal agents from the scene. We then evaluate a diverse set of state-of-the-art deep-learning model architectures on our proposed benchmark and find that all models exhibit large shifts under perturbation. Under non-causal perturbations, we observe a $25$-$38\%$ relative change in minADE as compared to the original. We then investigate techniques to improve model robustness, including increasing the training dataset size and using targeted data augmentations that drop agents throughout training. We plan to provide the causal agent labels as an additional attribute to WOMD and release the robustness benchmarks to aid the community in building more reliable and safe deep-learning models for motion forecasting.
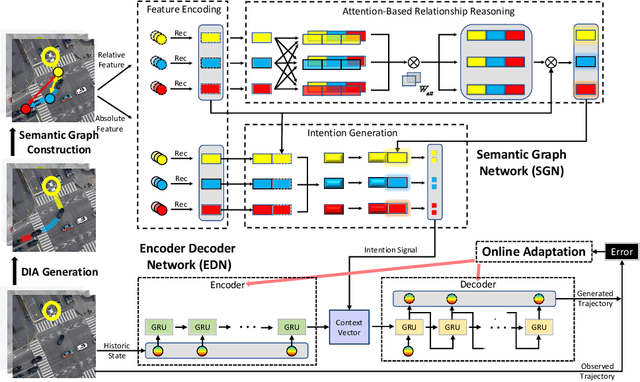
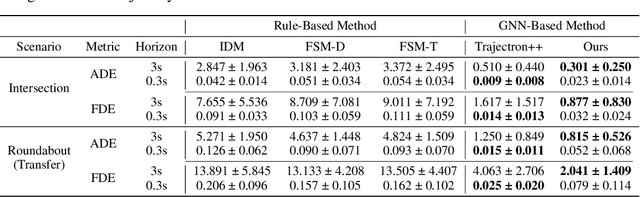
Transferable and Adaptable Driving Behavior Prediction
Feb 13, 2022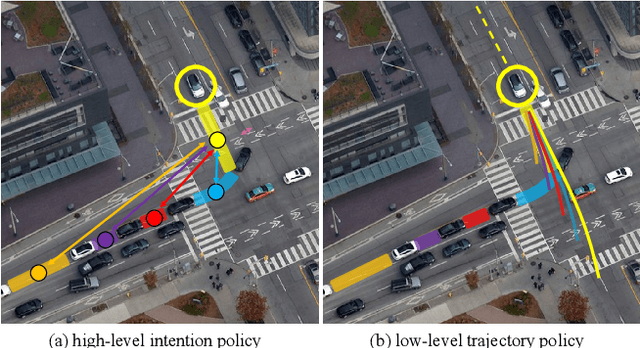
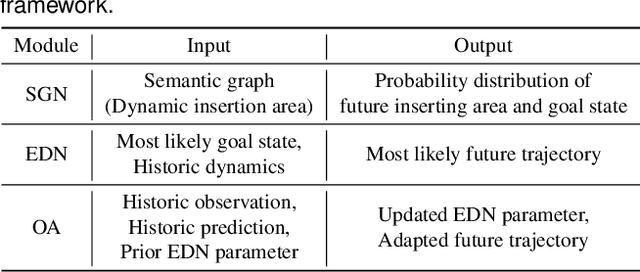
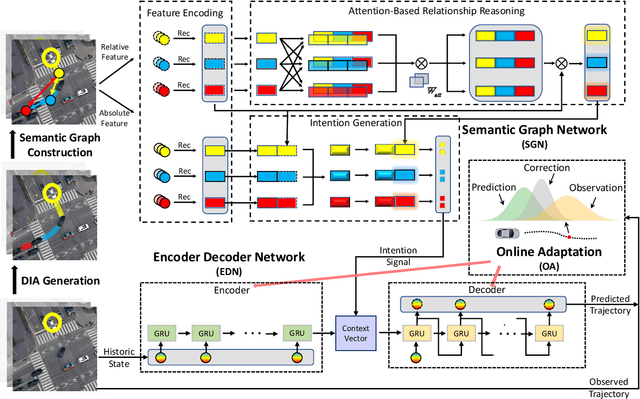

While autonomous vehicles still struggle to solve challenging situations during on-road driving, humans have long mastered the essence of driving with efficient, transferable, and adaptable driving capability. By mimicking humans' cognition model and semantic understanding during driving, we propose HATN, a hierarchical framework to generate high-quality, transferable, and adaptable predictions for driving behaviors in multi-agent dense-traffic environments. Our hierarchical method consists of a high-level intention identification policy and a low-level trajectory generation policy. We introduce a novel semantic sub-task definition and generic state representation for each sub-task. With these techniques, the hierarchical framework is transferable across different driving scenarios. Besides, our model is able to capture variations of driving behaviors among individuals and scenarios by an online adaptation module. We demonstrate our algorithms in the task of trajectory prediction for real traffic data at intersections and roundabouts from the INTERACTION dataset. Through extensive numerical studies, it is evident that our method significantly outperformed other methods in terms of prediction accuracy, transferability, and adaptability. Pushing the state-of-the-art performance by a considerable margin, we also provide a cognitive view of understanding the driving behavior behind such improvement. We highlight that in the future, more research attention and effort are deserved for transferability and adaptability. It is not only due to the promising performance elevation of prediction and planning algorithms, but more fundamentally, they are crucial for the scalable and general deployment of autonomous vehicles.
Hierarchical Adaptable and Transferable Networks (HATN) for Driving Behavior Prediction
Nov 01, 2021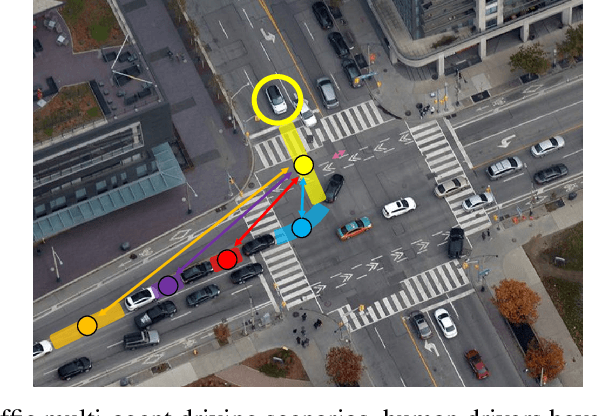
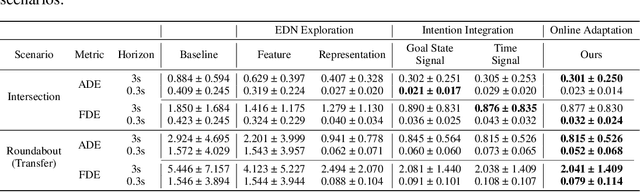
When autonomous vehicles still struggle to solve challenging situations during on-road driving, humans have long mastered the essence of driving with efficient transferable and adaptable driving capability. By mimicking humans' cognition model and semantic understanding during driving, we present HATN, a hierarchical framework to generate high-quality driving behaviors in multi-agent dense-traffic environments. Our method hierarchically consists of a high-level intention identification and low-level action generation policy. With the semantic sub-task definition and generic state representation, the hierarchical framework is transferable across different driving scenarios. Besides, our model is also able to capture variations of driving behaviors among individuals and scenarios by an online adaptation module. We demonstrate our algorithms in the task of trajectory prediction for real traffic data at intersections and roundabouts, where we conducted extensive studies of the proposed method and demonstrated how our method outperformed other methods in terms of prediction accuracy and transferability.
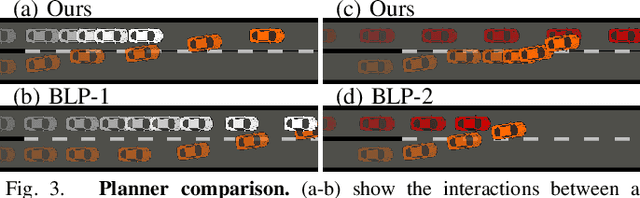
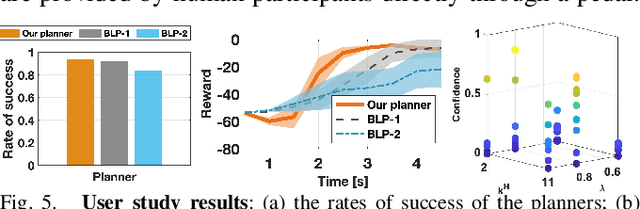
Safety Assurances for Human-Robot Interaction via Confidence-aware Game-theoretic Human Models
Sep 29, 2021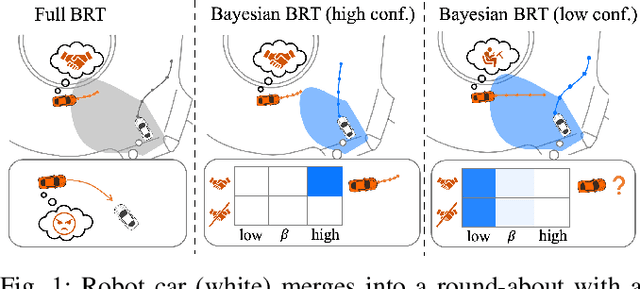

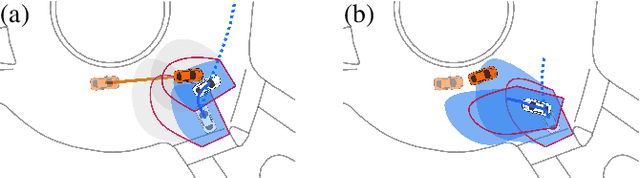

An outstanding challenge with safety methods for human-robot interaction is reducing their conservatism while maintaining robustness to variations in human behavior. In this work, we propose that robots use confidence-aware game-theoretic models of human behavior when assessing the safety of a human-robot interaction. By treating the influence between the human and robot as well as the human's rationality as unobserved latent states, we succinctly infer the degree to which a human is following the game-theoretic interaction model. We leverage this model to restrict the set of feasible human controls during safety verification, enabling the robot to confidently modulate the conservatism of its safety monitor online. Evaluations in simulated human-robot scenarios and ablation studies demonstrate that imbuing safety monitors with confidence-aware game-theoretic models enables both safe and efficient human-robot interaction. Moreover, evaluations with real traffic data show that our safety monitor is less conservative than traditional safety methods in real human driving scenarios.
Anytime Game-Theoretic Planning with Active Reasoning About Humans' Latent States for Human-Centered Robots
Sep 26, 2021

A human-centered robot needs to reason about the cognitive limitation and potential irrationality of its human partner to achieve seamless interactions. This paper proposes an anytime game-theoretic planner that integrates iterative reasoning models, a partially observable Markov decision process, and chance-constrained Monte-Carlo belief tree search for robot behavioral planning. Our planner enables a robot to safely and actively reason about its human partner's latent cognitive states (bounded intelligence and irrationality) in real-time to maximize its utility better. We validate our approach in an autonomous driving domain where our behavioral planner and a low-level motion controller hierarchically control an autonomous car to negotiate traffic merges. Simulations and user studies are conducted to show our planner's effectiveness.
Iterative Imitation Policy Improvement for Interactive Autonomous Driving
Sep 03, 2021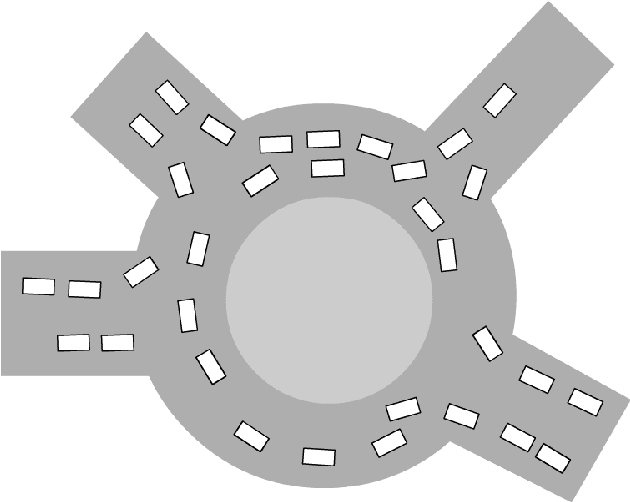
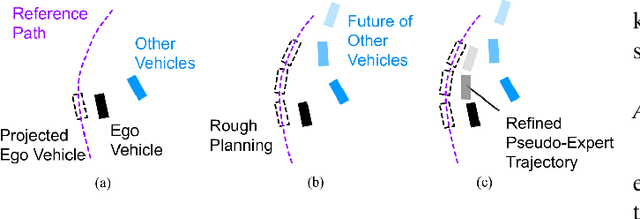

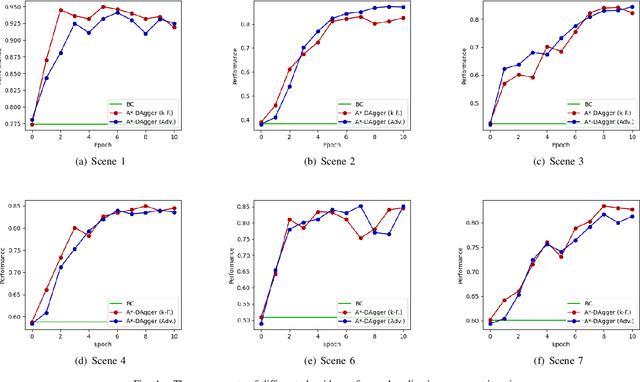
We propose an imitation learning system for autonomous driving in urban traffic with interactions. We train a Behavioral Cloning~(BC) policy to imitate driving behavior collected from the real urban traffic, and apply the data aggregation algorithm to improve its performance iteratively. Applying data aggregation in this setting comes with two challenges. The first challenge is that it is expensive and dangerous to collect online rollout data in the real urban traffic. Creating similar traffic scenarios in simulator like CARLA for online rollout collection can also be difficult. Instead, we propose to create a weak simulator from the training dataset, in which all the surrounding vehicles follow the data trajectory provided by the dataset. We find that the collected online data in such a simulator can still be used to improve BC policy's performance. The second challenge is the tedious and time-consuming process of human labelling process during online rollout. To solve this problem, we use an A$^*$ planner as a pseudo-expert to provide expert-like demonstration. We validate our proposed imitation learning system in the real urban traffic scenarios. The experimental results show that our system can significantly improve the performance of baseline BC policy.
Constrained Iterative LQG for Real-Time Chance-Constrained Gaussian Belief Space Planning
Aug 21, 2021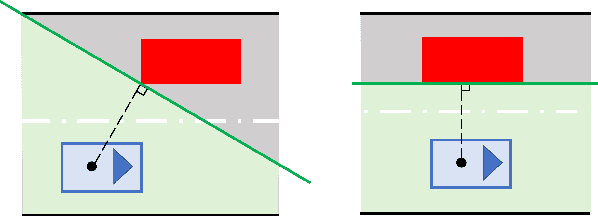

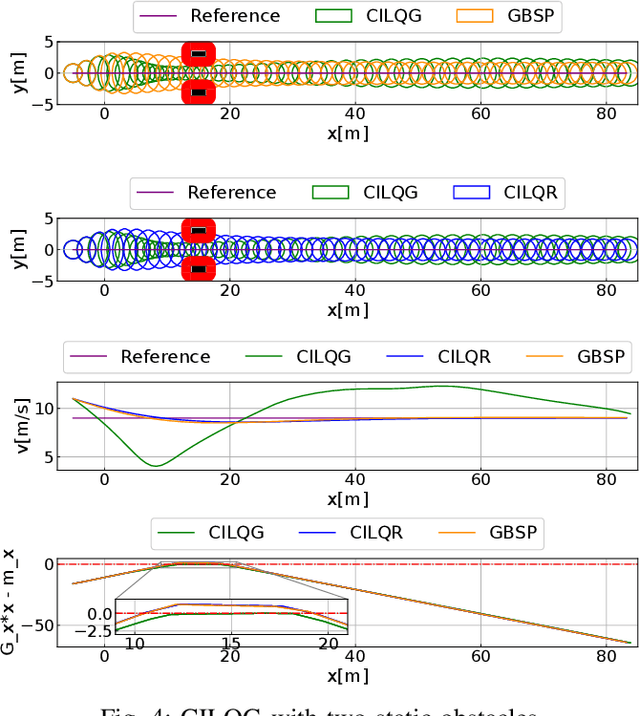
Motion planning under uncertainty is of significant importance for safety-critical systems such as autonomous vehicles. Such systems have to satisfy necessary constraints (e.g., collision avoidance) with potential uncertainties coming from either disturbed system dynamics or noisy sensor measurements. However, existing motion planning methods cannot efficiently find the robust optimal solutions under general nonlinear and non-convex settings. In this paper, we formulate such problem as chance-constrained Gaussian belief space planning and propose the constrained iterative Linear Quadratic Gaussian (CILQG) algorithm as a real-time solution. In this algorithm, we iteratively calculate a Gaussian approximation of the belief and transform the chance-constraints. We evaluate the effectiveness of our method in simulations of autonomous driving planning tasks with static and dynamic obstacles. Results show that CILQG can handle uncertainties more appropriately and has faster computation time than baseline methods.
A Microscopic Pandemic Simulator for Pandemic Prediction Using Scalable Million-Agent Reinforcement Learning
Aug 14, 2021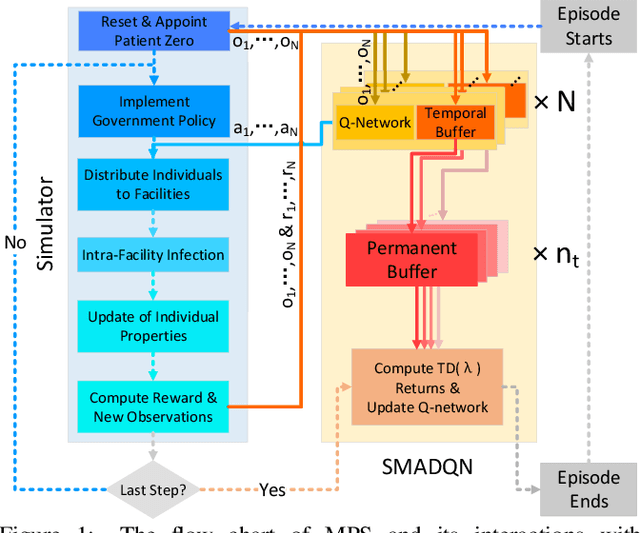

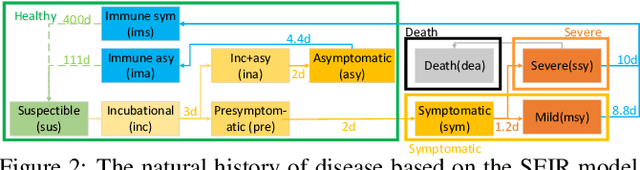
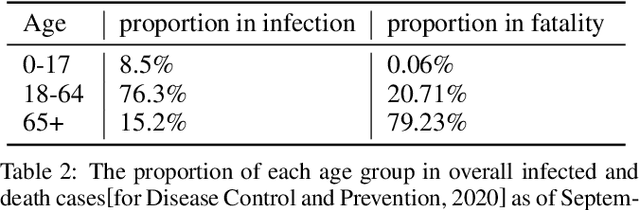
Microscopic epidemic models are powerful tools for government policy makers to predict and simulate epidemic outbreaks, which can capture the impact of individual behaviors on the macroscopic phenomenon. However, existing models only consider simple rule-based individual behaviors, limiting their applicability. This paper proposes a deep-reinforcement-learning-powered microscopic model named Microscopic Pandemic Simulator (MPS). By replacing rule-based agents with rational agents whose behaviors are driven to maximize rewards, the MPS provides a better approximation of real world dynamics. To efficiently simulate with massive amounts of agents in MPS, we propose Scalable Million-Agent DQN (SMADQN). The MPS allows us to efficiently evaluate the impact of different government strategies. This paper first calibrates the MPS against real-world data in Allegheny, US, then demonstratively evaluates two government strategies: information disclosure and quarantine. The results validate the effectiveness of the proposed method. As a broad impact, this paper provides novel insights for the application of DRL in large scale agent-based networks such as economic and social networks.