 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCRCC: Contrast-Based Robust Cross-Subject and Cross-Site Representation Learning for EEG
Feb 22, 2026EEG-based neural decoding models often fail to generalize across acquisition sites due to structured, site-dependent biases implicitly exploited during training. We reformulate cross-site clinical EEG learning as a bias-factorized generalization problem, in which domain shifts arise from multiple interacting sources. We identify three fundamental bias factors and propose a general training framework that mitigates their influence through data standardization and representation-level constraints. We construct a standardized multi-site EEG benchmark for Major Depressive Disorder and introduce CRCC, a two-stage training paradigm combining encoder-decoder pretraining with joint fine-tuning via cross-subject/site contrastive learning and site-adversarial optimization. CRCC consistently outperforms state-of-the-art baselines and achieves a 10.7 percentage-point improvement in balanced accuracy under strict zero-shot site transfer, demonstrating robust generalization to unseen environments.
AgentGroupChat-V2: Divide-and-Conquer Is What LLM-Based Multi-Agent System Need
Jun 18, 2025Large language model based multi-agent systems have demonstrated significant potential in social simulation and complex task resolution domains. However, current frameworks face critical challenges in system architecture design, cross-domain generalizability, and performance guarantees, particularly as task complexity and number of agents increases. We introduces AgentGroupChat-V2, a novel framework addressing these challenges through three core innovations: (1) a divide-and-conquer fully parallel architecture that decomposes user queries into hierarchical task forest structures enabling dependency management and distributed concurrent processing. (2) an adaptive collaboration engine that dynamically selects heterogeneous LLM combinations and interaction modes based on task characteristics. (3) agent organization optimization strategies combining divide-and-conquer approaches for efficient problem decomposition. Extensive experiments demonstrate AgentGroupChat-V2's superior performance across diverse domains, achieving 91.50% accuracy on GSM8K (exceeding the best baseline by 5.6 percentage points), 30.4% accuracy on competition-level AIME (nearly doubling other methods), and 79.20% pass@1 on HumanEval. Performance advantages become increasingly pronounced with higher task difficulty, particularly on Level 5 MATH problems where improvements exceed 11 percentage points compared to state-of-the-art baselines. These results confirm that AgentGroupChat-V2 provides a comprehensive solution for building efficient, general-purpose LLM multi-agent systems with significant advantages in complex reasoning scenarios. Code is available at https://github.com/MikeGu721/AgentGroupChat-V2.
Adaptive Anomaly Recovery for Telemanipulation: A Diffusion Model Approach to Vision-Based Tracking
Mar 11, 2025



Dexterous telemanipulation critically relies on the continuous and stable tracking of the human operator's commands to ensure robust operation. Vison-based tracking methods are widely used but have low stability due to anomalies such as occlusions, inadequate lighting, and loss of sight. Traditional filtering, regression, and interpolation methods are commonly used to compensate for explicit information such as angles and positions. These approaches are restricted to low-dimensional data and often result in information loss compared to the original high-dimensional image and video data. Recent advances in diffusion-based approaches, which can operate on high-dimensional data, have achieved remarkable success in video reconstruction and generation. However, these methods have not been fully explored in continuous control tasks in robotics. This work introduces the Diffusion-Enhanced Telemanipulation (DET) framework, which incorporates the Frame-Difference Detection (FDD) technique to identify and segment anomalies in video streams. These anomalous clips are replaced after reconstruction using diffusion models, ensuring robust telemanipulation performance under challenging visual conditions. We validated this approach in various anomaly scenarios and compared it with the baseline methods. Experiments show that DET achieves an average RMSE reduction of 17.2% compared to the cubic spline and 51.1% compared to FFT-based interpolation for different occlusion durations.
Bio-Skin: A Cost-Effective Thermostatic Tactile Sensor with Multi-Modal Force and Temperature Detection
Mar 11, 2025
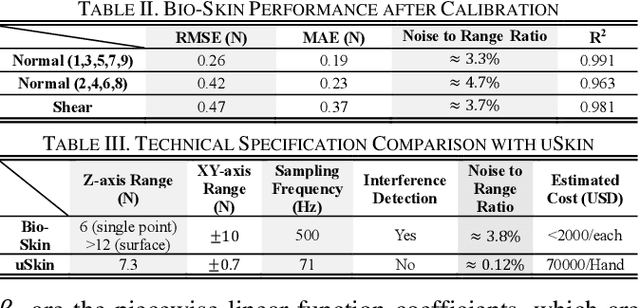

Tactile sensors can significantly enhance the perception of humanoid robotics systems by providing contact information that facilitates human-like interactions. However, existing commercial tactile sensors focus on improving the resolution and sensitivity of single-modal detection with high-cost components and densely integrated design, incurring complex manufacturing processes and unaffordable prices. In this work, we present Bio-Skin, a cost-effective multi-modal tactile sensor that utilizes single-axis Hall-effect sensors for planar normal force measurement and bar-shape piezo resistors for 2D shear force measurement. A thermistor coupling with a heating wire is integrated into a silicone body to achieve temperature sensation and thermostatic function analogous to human skin. We also present a cross-reference framework to validate the two modalities of the force sensing signal, improving the sensing fidelity in a complex electromagnetic environment. Bio-Skin has a multi-layer design, and each layer is manufactured sequentially and subsequently integrated, thereby offering a fast production pathway. After calibration, Bio-Skin demonstrates performance metrics-including signal-to-range ratio, sampling rate, and measurement range-comparable to current commercial products, with one-tenth of the cost. The sensor's real-world performance is evaluated using an Allegro hand in object grasping tasks, while its temperature regulation functionality was assessed in a material detection task.
CoSER: Coordinating LLM-Based Persona Simulation of Established Roles
Feb 13, 2025Role-playing language agents (RPLAs) have emerged as promising applications of large language models (LLMs). However, simulating established characters presents a challenging task for RPLAs, due to the lack of authentic character datasets and nuanced evaluation methods using such data. In this paper, we present CoSER, a collection of a high-quality dataset, open models, and an evaluation protocol towards effective RPLAs of established characters. The CoSER dataset covers 17,966 characters from 771 renowned books. It provides authentic dialogues with real-world intricacies, as well as diverse data types such as conversation setups, character experiences and internal thoughts. Drawing from acting methodology, we introduce given-circumstance acting for training and evaluating role-playing LLMs, where LLMs sequentially portray multiple characters in book scenes. Using our dataset, we develop CoSER 8B and CoSER 70B, i.e., advanced open role-playing LLMs built on LLaMA-3.1 models. Extensive experiments demonstrate the value of the CoSER dataset for RPLA training, evaluation and retrieval. Moreover, CoSER 70B exhibits state-of-the-art performance surpassing or matching GPT-4o on our evaluation and three existing benchmarks, i.e., achieving 75.80% and 93.47% accuracy on the InCharacter and LifeChoice benchmarks respectively.
Think Thrice Before You Act: Progressive Thought Refinement in Large Language Models
Oct 17, 2024



Recent advancements in large language models (LLMs) have demonstrated that progressive refinement, rather than providing a single answer, results in more accurate and thoughtful outputs. However, existing methods often rely heavily on supervision signals to evaluate previous responses, making it difficult to assess output quality in more open-ended scenarios effectively. Additionally, these methods are typically designed for specific tasks, which limits their generalization to new domains. To address these limitations, we propose Progressive Thought Refinement (PTR), a framework that enables LLMs to refine their responses progressively. PTR operates in two phases: (1) Thought data construction stage: We propose a weak and strong model collaborative selection strategy to build a high-quality progressive refinement dataset to ensure logical consistency from thought to answers, and the answers are gradually refined in each round. (2) Thought-Mask Fine-Tuning Phase: We design a training structure to mask the "thought" and adjust loss weights to encourage LLMs to refine prior thought, teaching them to implicitly understand "how to improve" rather than "what is correct." Experimental results show that PTR significantly enhances LLM performance across ten diverse tasks (avg. from 49.6% to 53.5%) without task-specific fine-tuning. Notably, in more open-ended tasks, LLMs also demonstrate substantial improvements in the quality of responses beyond mere accuracy, suggesting that PTR truly teaches LLMs to self-improve over time.
Impact of Tactile Sensor Quantities and Placements on Learning-based Dexterous Manipulation
Sep 30, 2024



Tactile information effectively enables faster training and better task performance for learning-based in-hand manipulation. Existing approaches are validated in simulated environments with a large number of tactile sensors. However, attaching such sensors to a real robot hand is not applicable due to high cost and physical limitations. To enable real-world adoption of tactile sensors, this study investigates the impact of tactile sensors, including their varying quantities and placements on robot hands, on the dexterous manipulation task performance and analyzes the importance of each. Through empirically decreasing the sensor quantities, we successfully find an optimized set of tactile sensors (21 sensors) configuration, which keeps over 93% task performance with only 20% sensor quantities compared to the original set (92 sensors) for the block manipulation task, leading to a potential reduction of over 80% in sensor manufacturing and design costs. To transform the empirical results into a generalizable understanding, we build a task performance prediction model with a weighted linear regression algorithm and use it to forecast the task performance with different sensor configurations. To show its generalizability, we verified this model in egg and pen manipulation tasks and achieved an average prediction error of 3.12%.
Bi-directional Momentum-based Haptic Feedback and Control System for Dexterous Telemanipulation
Sep 30, 2024
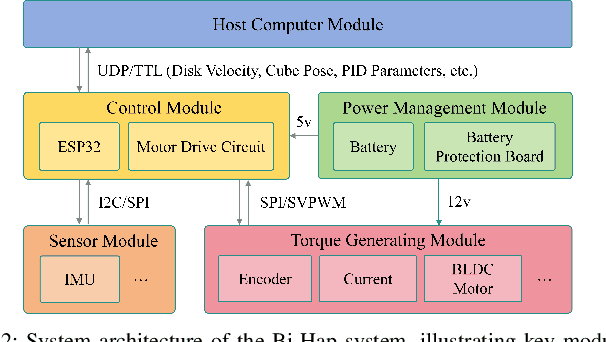


Haptic feedback is essential for dexterous telemanipulation that enables operators to control robotic hands remotely with high skill and precision, mimicking a human hand's natural movement and sensation. However, current haptic methods for dexterous telemanipulation cannot support torque feedback, resulting in object rotation and rolling mismatches. The operator must make tedious adjustments in these tasks, leading to delays, reduced situational awareness, and suboptimal task performance. This work presents a Bi-directional Momentum-based Haptic Feedback and Control (Bi-Hap) system for real-time dexterous telemanipulation. Bi-Hap integrates multi-modal sensors to extract human interactive information with the object and share it with the robot's learning-based controller. A Field-Oriented Control (FOC) algorithm is developed to enable the integrated brushless active momentum wheel to generate precise torque and vibrative feedback, bridging the gap between human intent and robotic actions. Different feedback strategies are designed for varying error states to align with the operator's intuition. Extensive experiments with human subjects using a virtual Shadow Dexterous Hand demonstrate the effectiveness of Bi-Hap in enhancing task performance and user confidence. Bi-Hap achieved real-time feedback capability with low command following latency (delay<0.025s) and highly accurate torque feedback (RMSE<0.010 Nm).
Agent Group Chat: An Interactive Group Chat Simulacra For Better Eliciting Collective Emergent Behavior
Mar 20, 2024To investigate the role of language in human collective behaviors, we developed the Agent Group Chat simulation to simulate linguistic interactions among multi-agent in different settings. Agents are asked to free chat in this simulation for their own purposes based on their character setting, aiming to see agents exhibit emergent behaviours that are both unforeseen and significant. Four narrative scenarios, Inheritance Disputes, Law Court Debates, Philosophical Discourses, Movie Casting Contention, are integrated into Agent Group Chat to evaluate its support for diverse storylines. By configuring specific environmental settings within Agent Group Chat, we are able to assess whether agents exhibit behaviors that align with human expectations. We evaluate the disorder within the environment by computing the n-gram Shannon entropy of all the content speak by characters. Our findings reveal that under the premise of agents possessing substantial alignment with human expectations, facilitating more extensive information exchange within the simulation ensures greater orderliness amidst diversity, which leads to the emergence of more unexpected and meaningful emergent behaviors. The code is open source in https://github.com/MikeGu721/AgentGroup, and online platform will be open soon.
CO-SNE: Dimensionality Reduction and Visualization for Hyperbolic Data
Nov 30, 2021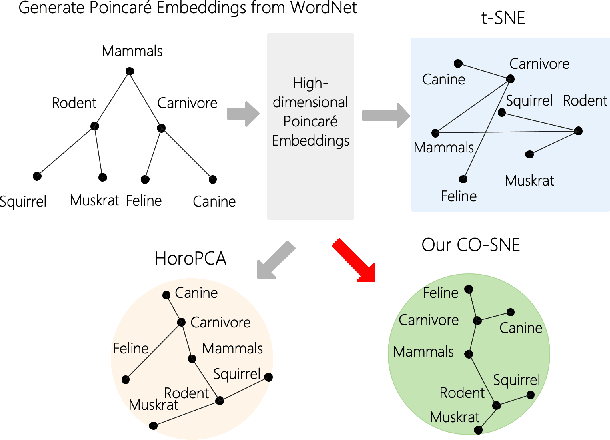

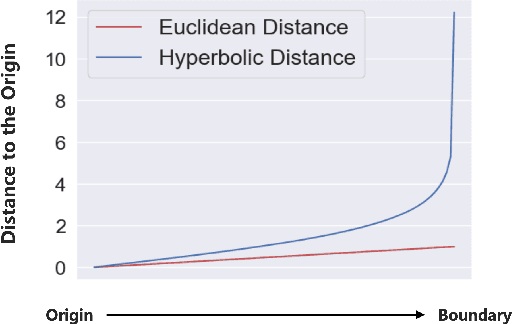
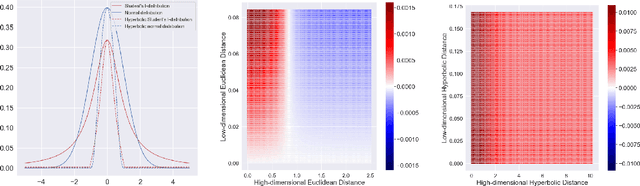
Hyperbolic space can embed tree metric with little distortion, a desirable property for modeling hierarchical structures of real-world data and semantics. While high-dimensional embeddings often lead to better representations, most hyperbolic models utilize low-dimensional embeddings, due to non-trivial optimization as well as the lack of a visualization for high-dimensional hyperbolic data. We propose CO-SNE, extending the Euclidean space visualization tool, t-SNE, to hyperbolic space. Like t-SNE, it converts distances between data points to joint probabilities and tries to minimize the Kullback-Leibler divergence between the joint probabilities of high-dimensional data $X$ and low-dimensional embeddings $Y$. However, unlike Euclidean space, hyperbolic space is inhomogeneous: a volume could contain a lot more points at a location far from the origin. CO-SNE thus uses hyperbolic normal distributions for $X$ and hyberbolic \underline{C}auchy instead of t-SNE's Student's t-distribution for $Y$, and it additionally attempts to preserve $X$'s individual distances to the \underline{O}rigin in $Y$. We apply CO-SNE to high-dimensional hyperbolic biological data as well as unsupervisedly learned hyperbolic representations. Our results demonstrate that CO-SNE deflates high-dimensional hyperbolic data into a low-dimensional space without losing their hyperbolic characteristics, significantly outperforming popular visualization tools such as PCA, t-SNE, UMAP, and HoroPCA, the last of which is specifically designed for hyperbolic data.