 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBi-directional Momentum-based Haptic Feedback and Control System for Dexterous Telemanipulation
Paper and Code
Sep 30, 2024
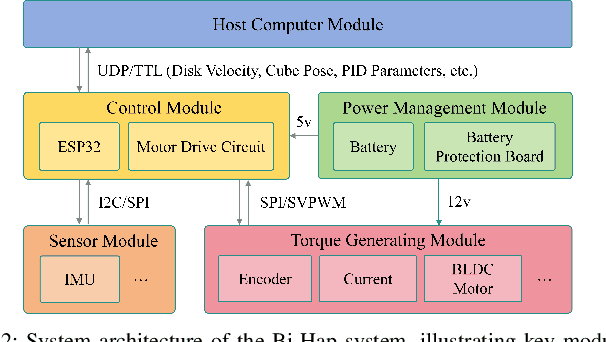


Haptic feedback is essential for dexterous telemanipulation that enables operators to control robotic hands remotely with high skill and precision, mimicking a human hand's natural movement and sensation. However, current haptic methods for dexterous telemanipulation cannot support torque feedback, resulting in object rotation and rolling mismatches. The operator must make tedious adjustments in these tasks, leading to delays, reduced situational awareness, and suboptimal task performance. This work presents a Bi-directional Momentum-based Haptic Feedback and Control (Bi-Hap) system for real-time dexterous telemanipulation. Bi-Hap integrates multi-modal sensors to extract human interactive information with the object and share it with the robot's learning-based controller. A Field-Oriented Control (FOC) algorithm is developed to enable the integrated brushless active momentum wheel to generate precise torque and vibrative feedback, bridging the gap between human intent and robotic actions. Different feedback strategies are designed for varying error states to align with the operator's intuition. Extensive experiments with human subjects using a virtual Shadow Dexterous Hand demonstrate the effectiveness of Bi-Hap in enhancing task performance and user confidence. Bi-Hap achieved real-time feedback capability with low command following latency (delay<0.025s) and highly accurate torque feedback (RMSE<0.010 Nm).