 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeELSPR: Evaluator LLM Training Data Self-Purification on Non-Transitive Preferences via Tournament Graph Reconstruction
May 23, 2025Large language models (LLMs) are widely used as evaluators for open-ended tasks, while previous research has emphasized biases in LLM evaluations, the issue of non-transitivity in pairwise comparisons remains unresolved: non-transitive preferences for pairwise comparisons, where evaluators prefer A over B, B over C, but C over A. Our results suggest that low-quality training data may reduce the transitivity of preferences generated by the Evaluator LLM. To address this, We propose a graph-theoretic framework to analyze and mitigate this problem by modeling pairwise preferences as tournament graphs. We quantify non-transitivity and introduce directed graph structural entropy to measure the overall clarity of preferences. Our analysis reveals significant non-transitivity in advanced Evaluator LLMs (with Qwen2.5-Max exhibiting 67.96%), as well as high entropy values (0.8095 for Qwen2.5-Max), reflecting low overall clarity of preferences. To address this issue, we designed a filtering strategy, ELSPR, to eliminate preference data that induces non-transitivity, retaining only consistent and transitive preference data for model fine-tuning. Experiments demonstrate that models fine-tuned with filtered data reduce non-transitivity by 13.78% (from 64.28% to 50.50%), decrease structural entropy by 0.0879 (from 0.8113 to 0.7234), and align more closely with human evaluators (human agreement rate improves by 0.6% and Spearman correlation increases by 0.01).
TAS-TsC: A Data-Driven Framework for Estimating Time of Arrival Using Temporal-Attribute-Spatial Tri-space Coordination of Truck Trajectories
Dec 02, 2024



Accurately estimating time of arrival (ETA) for trucks is crucial for optimizing transportation efficiency in logistics. GPS trajectory data offers valuable information for ETA, but challenges arise due to temporal sparsity, variable sequence lengths, and the interdependencies among multiple trucks. To address these issues, we propose the Temporal-Attribute-Spatial Tri-space Coordination (TAS-TsC) framework, which leverages three feature spaces-temporal, attribute, and spatial-to enhance ETA. Our framework consists of a Temporal Learning Module (TLM) using state space models to capture temporal dependencies, an Attribute Extraction Module (AEM) that transforms sequential features into structured attribute embeddings, and a Spatial Fusion Module (SFM) that models the interactions among multiple trajectories using graph representation learning.These modules collaboratively learn trajectory embeddings, which are then used by a Downstream Prediction Module (DPM) to estimate arrival times. We validate TAS-TsC on real truck trajectory datasets collected from Shenzhen, China, demonstrating its superior performance compared to existing methods.
Minder: Faulty Machine Detection for Large-scale Distributed Model Training
Nov 04, 2024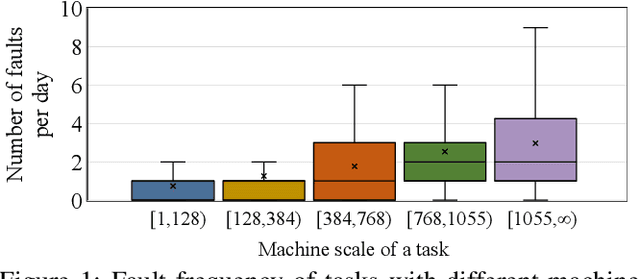
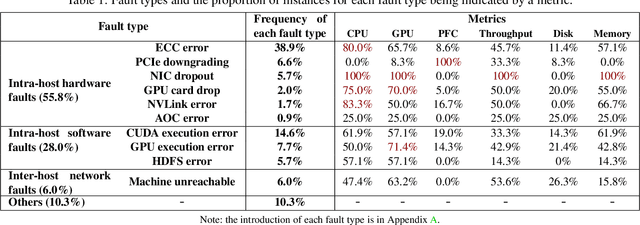
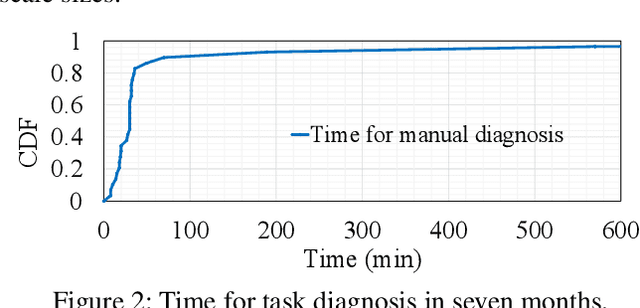
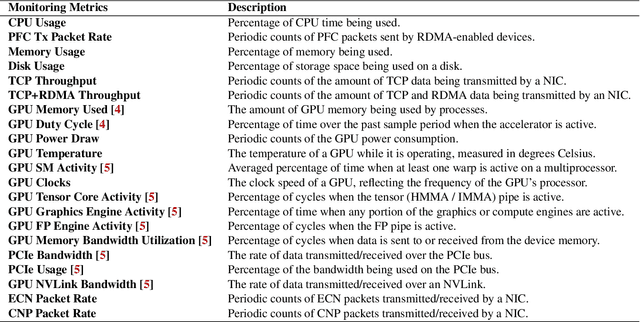
Large-scale distributed model training requires simultaneous training on up to thousands of machines. Faulty machine detection is critical when an unexpected fault occurs in a machine. From our experience, a training task can encounter two faults per day on average, possibly leading to a halt for hours. To address the drawbacks of the time-consuming and labor-intensive manual scrutiny, we propose Minder, an automatic faulty machine detector for distributed training tasks. The key idea of Minder is to automatically and efficiently detect faulty distinctive monitoring metric patterns, which could last for a period before the entire training task comes to a halt. Minder has been deployed in our production environment for over one year, monitoring daily distributed training tasks where each involves up to thousands of machines. In our real-world fault detection scenarios, Minder can accurately and efficiently react to faults within 3.6 seconds on average, with a precision of 0.904 and F1-score of 0.893.
Cora: Accelerating Stateful Network Applications with SmartNICs
Oct 29, 2024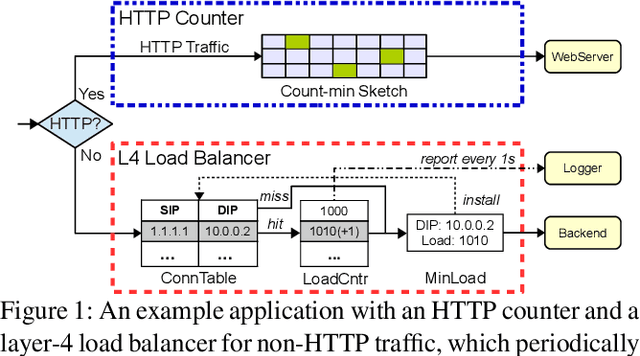
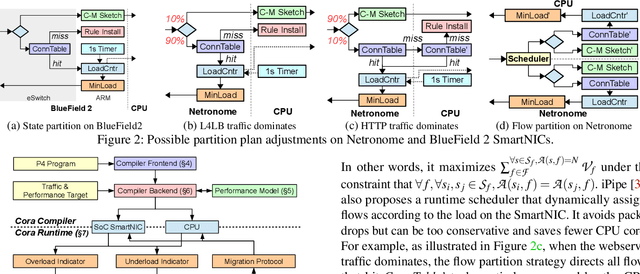
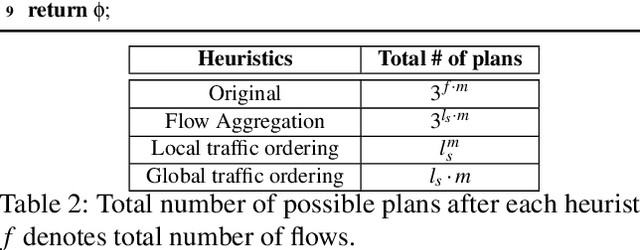
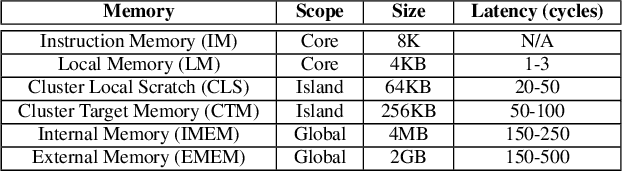
With the growing performance requirements on networked applications, there is a new trend of offloading stateful network applications to SmartNICs to improve performance and reduce the total cost of ownership. However, offloading stateful network applications is non-trivial due to state operation complexity, state resource consumption, and the complicated relationship between traffic and state. Naively partitioning the program by state or traffic can result in a suboptimal partition plan with higher CPU usage or even packet drops. In this paper, we propose Cora, a compiler and runtime that offloads stateful network applications to SmartNIC-accelerated hosts. Cora compiler introduces an accurate performance model for each SmartNIC and employs an efficient compiling algorithm to search the offloading plan. Cora runtime can monitor traffic dynamics and adapt to minimize CPU usage. Cora is built atop Netronome Agilio and BlueField 2 SmartNICs. Our evaluation shows that for the same throughput target, Cora can propose partition plans saving up to 94.0% CPU cores, 1.9 times more than baseline solutions. Under the same resource constraint, Cora can accelerate network functions by 44.9%-82.3%. Cora runtime can adapt to traffic changes and keep CPU usage low.
CBLab: Scalable Traffic Simulation with Enriched Data Supporting
Oct 03, 2022
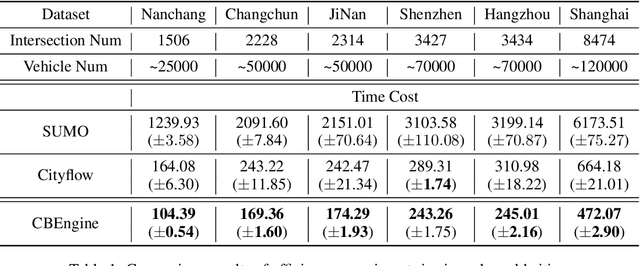
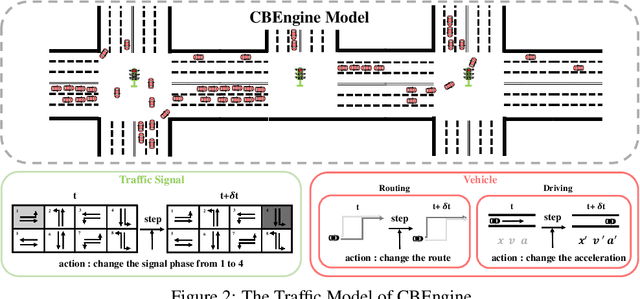
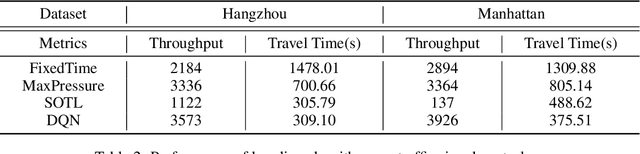
Traffic simulation provides interactive data for the optimization of traffic policies. However, existing traffic simulators are limited by their lack of scalability and shortage in input data, which prevents them from generating interactive data from traffic simulation in the scenarios of real large-scale city road networks. In this paper, we present City Brain Lab, a toolkit for scalable traffic simulation. CBLab is consist of three components: CBEngine, CBData, and CBScenario. CBEngine is a highly efficient simulators supporting large scale traffic simulation. CBData includes a traffic dataset with road network data of 100 cities all around the world. We also develop a pipeline to conduct one-click transformation from raw road networks to input data of our traffic simulation. Combining CBEngine and CBData allows researchers to run scalable traffic simulation in the road network of real large-scale cities. Based on that, CBScenario implements an interactive environment and several baseline methods for two scenarios of traffic policies respectively, with which traffic policies adaptable for large-scale urban traffic can be trained and tuned. To the best of our knowledge, CBLab is the first infrastructure supporting traffic policy optimization on large-scale urban scenarios. The code is available on Github: https://github.com/CityBrainLab/CityBrainLab.git.