 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProgD: Progressive Multi-scale Decoding with Dynamic Graphs for Joint Multi-agent Motion Forecasting
Sep 11, 2025Accurate motion prediction of surrounding agents is crucial for the safe planning of autonomous vehicles. Recent advancements have extended prediction techniques from individual agents to joint predictions of multiple interacting agents, with various strategies to address complex interactions within future motions of agents. However, these methods overlook the evolving nature of these interactions. To address this limitation, we propose a novel progressive multi-scale decoding strategy, termed ProgD, with the help of dynamic heterogeneous graph-based scenario modeling. In particular, to explicitly and comprehensively capture the evolving social interactions in future scenarios, given their inherent uncertainty, we design a progressive modeling of scenarios with dynamic heterogeneous graphs. With the unfolding of such dynamic heterogeneous graphs, a factorized architecture is designed to process the spatio-temporal dependencies within future scenarios and progressively eliminate uncertainty in future motions of multiple agents. Furthermore, a multi-scale decoding procedure is incorporated to improve on the future scenario modeling and consistent prediction of agents' future motion. The proposed ProgD achieves state-of-the-art performance on the INTERACTION multi-agent prediction benchmark, ranking $1^{st}$, and the Argoverse 2 multi-world forecasting benchmark.
Safety-Critical Traffic Simulation with Adversarial Transfer of Driving Intentions
Mar 07, 2025Traffic simulation, complementing real-world data with a long-tail distribution, allows for effective evaluation and enhancement of the ability of autonomous vehicles to handle accident-prone scenarios. Simulating such safety-critical scenarios is nontrivial, however, from log data that are typically regular scenarios, especially in consideration of dynamic adversarial interactions between the future motions of autonomous vehicles and surrounding traffic participants. To address it, this paper proposes an innovative and efficient strategy, termed IntSim, that explicitly decouples the driving intentions of surrounding actors from their motion planning for realistic and efficient safety-critical simulation. We formulate the adversarial transfer of driving intention as an optimization problem, facilitating extensive exploration of diverse attack behaviors and efficient solution convergence. Simultaneously, intention-conditioned motion planning benefits from powerful deep models and large-scale real-world data, permitting the simulation of realistic motion behaviors for actors. Specially, through adapting driving intentions based on environments, IntSim facilitates the flexible realization of dynamic adversarial interactions with autonomous vehicles. Finally, extensive open-loop and closed-loop experiments on real-world datasets, including nuScenes and Waymo, demonstrate that the proposed IntSim achieves state-of-the-art performance in simulating realistic safety-critical scenarios and further improves planners in handling such scenarios.
AMM: Adaptive Modularized Reinforcement Model for Multi-city Traffic Signal Control
Jan 05, 2025



Traffic signal control (TSC) is an important and widely studied direction. Recently, reinforcement learning (RL) methods have been used to solve TSC problems and achieve superior performance over conventional TSC methods. However, applying RL methods to the real world is challenging due to the huge cost of experiments in real-world traffic environments. One possible solution is TSC domain adaptation, which adapts trained models to target environments and reduces the number of interactions and the training cost. However, existing TSC domain adaptation methods still face two major issues: the lack of consideration for differences across cities and the low utilization of multi-city data. To solve aforementioned issues, we propose an approach named Adaptive Modularized Model (AMM). By modularizing TSC problems and network models, we overcome the challenge of possible changes in environmental observations. We also aggregate multi-city experience through meta-learning. We conduct extensive experiments on different cities and show that AMM can achieve excellent performance with limited interactions in target environments and outperform existing methods. We also demonstrate the feasibility and generalizability of our method.
CBLab: Scalable Traffic Simulation with Enriched Data Supporting
Oct 03, 2022
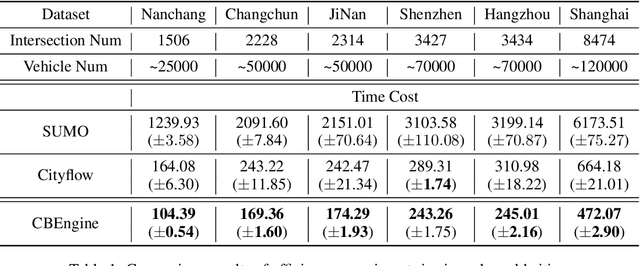
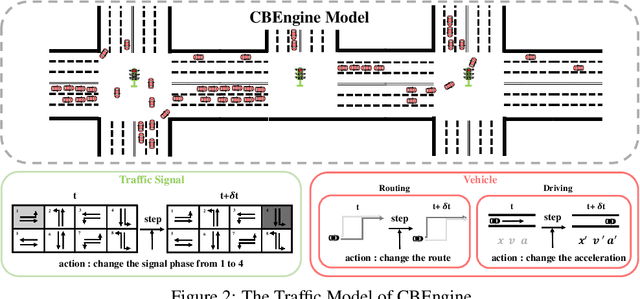
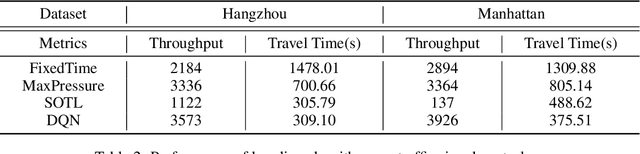
Traffic simulation provides interactive data for the optimization of traffic policies. However, existing traffic simulators are limited by their lack of scalability and shortage in input data, which prevents them from generating interactive data from traffic simulation in the scenarios of real large-scale city road networks. In this paper, we present City Brain Lab, a toolkit for scalable traffic simulation. CBLab is consist of three components: CBEngine, CBData, and CBScenario. CBEngine is a highly efficient simulators supporting large scale traffic simulation. CBData includes a traffic dataset with road network data of 100 cities all around the world. We also develop a pipeline to conduct one-click transformation from raw road networks to input data of our traffic simulation. Combining CBEngine and CBData allows researchers to run scalable traffic simulation in the road network of real large-scale cities. Based on that, CBScenario implements an interactive environment and several baseline methods for two scenarios of traffic policies respectively, with which traffic policies adaptable for large-scale urban traffic can be trained and tuned. To the best of our knowledge, CBLab is the first infrastructure supporting traffic policy optimization on large-scale urban scenarios. The code is available on Github: https://github.com/CityBrainLab/CityBrainLab.git.