 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMACS: Mass Conditioned 3D Hand and Object Motion Synthesis
Dec 22, 2023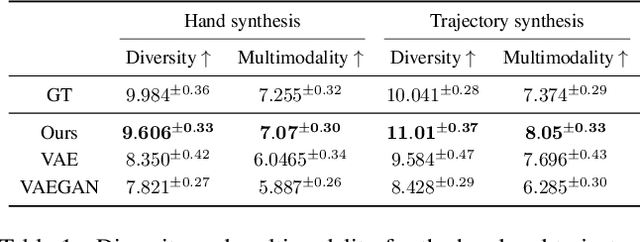
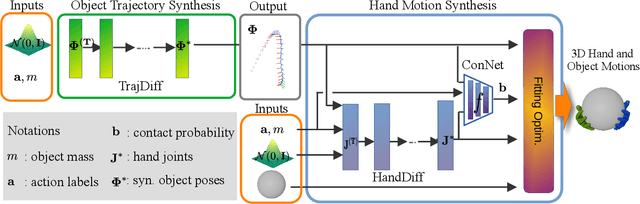
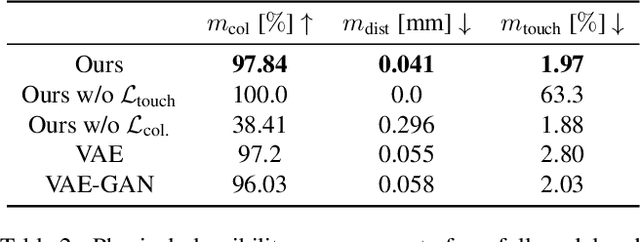
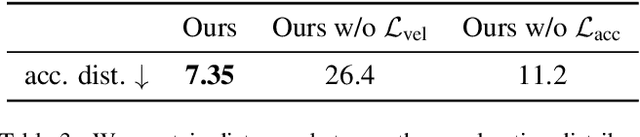
The physical properties of an object, such as mass, significantly affect how we manipulate it with our hands. Surprisingly, this aspect has so far been neglected in prior work on 3D motion synthesis. To improve the naturalness of the synthesized 3D hand object motions, this work proposes MACS the first MAss Conditioned 3D hand and object motion Synthesis approach. Our approach is based on cascaded diffusion models and generates interactions that plausibly adjust based on the object mass and interaction type. MACS also accepts a manually drawn 3D object trajectory as input and synthesizes the natural 3D hand motions conditioned by the object mass. This flexibility enables MACS to be used for various downstream applications, such as generating synthetic training data for ML tasks, fast animation of hands for graphics workflows, and generating character interactions for computer games. We show experimentally that a small-scale dataset is sufficient for MACS to reasonably generalize across interpolated and extrapolated object masses unseen during the training. Furthermore, MACS shows moderate generalization to unseen objects, thanks to the mass-conditioned contact labels generated by our surface contact synthesis model ConNet. Our comprehensive user study confirms that the synthesized 3D hand-object interactions are highly plausible and realistic.
Spectral Graphormer: Spectral Graph-based Transformer for Egocentric Two-Hand Reconstruction using Multi-View Color Images
Aug 21, 2023We propose a novel transformer-based framework that reconstructs two high fidelity hands from multi-view RGB images. Unlike existing hand pose estimation methods, where one typically trains a deep network to regress hand model parameters from single RGB image, we consider a more challenging problem setting where we directly regress the absolute root poses of two-hands with extended forearm at high resolution from egocentric view. As existing datasets are either infeasible for egocentric viewpoints or lack background variations, we create a large-scale synthetic dataset with diverse scenarios and collect a real dataset from multi-calibrated camera setup to verify our proposed multi-view image feature fusion strategy. To make the reconstruction physically plausible, we propose two strategies: (i) a coarse-to-fine spectral graph convolution decoder to smoothen the meshes during upsampling and (ii) an optimisation-based refinement stage at inference to prevent self-penetrations. Through extensive quantitative and qualitative evaluations, we show that our framework is able to produce realistic two-hand reconstructions and demonstrate the generalisation of synthetic-trained models to real data, as well as real-time AR/VR applications.
HandFlow: Quantifying View-Dependent 3D Ambiguity in Two-Hand Reconstruction with Normalizing Flow
Oct 04, 2022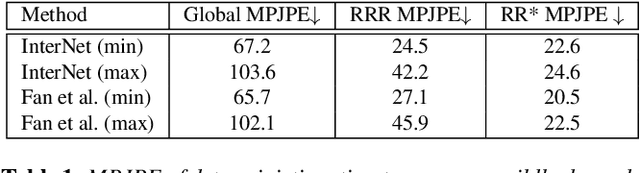
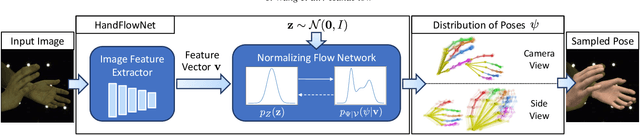
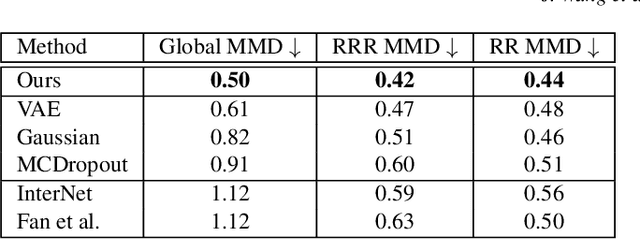
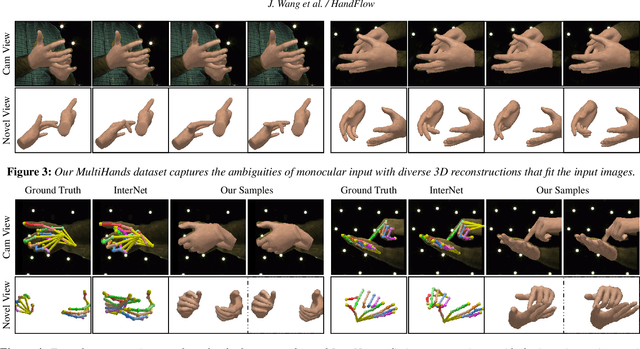
Reconstructing two-hand interactions from a single image is a challenging problem due to ambiguities that stem from projective geometry and heavy occlusions. Existing methods are designed to estimate only a single pose, despite the fact that there exist other valid reconstructions that fit the image evidence equally well. In this paper we propose to address this issue by explicitly modeling the distribution of plausible reconstructions in a conditional normalizing flow framework. This allows us to directly supervise the posterior distribution through a novel determinant magnitude regularization, which is key to varied 3D hand pose samples that project well into the input image. We also demonstrate that metrics commonly used to assess reconstruction quality are insufficient to evaluate pose predictions under such severe ambiguity. To address this, we release the first dataset with multiple plausible annotations per image called MultiHands. The additional annotations enable us to evaluate the estimated distribution using the maximum mean discrepancy metric. Through this, we demonstrate the quality of our probabilistic reconstruction and show that explicit ambiguity modeling is better-suited for this challenging problem.
RGB2Hands: Real-Time Tracking of 3D Hand Interactions from Monocular RGB Video
Jun 22, 2021
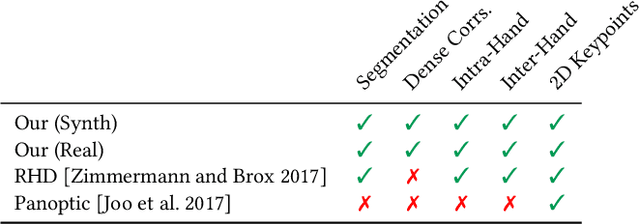
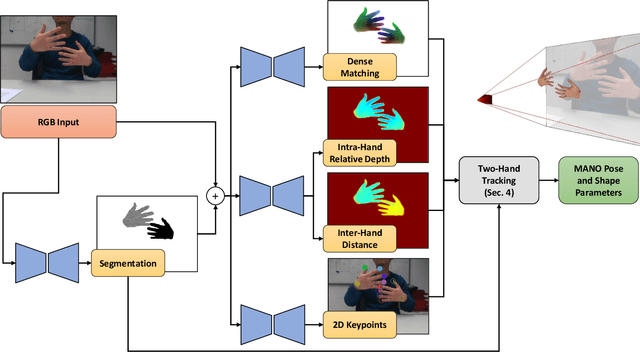
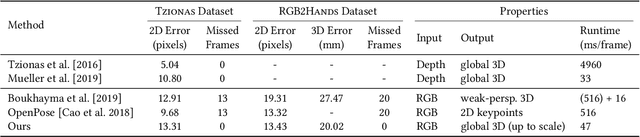
Tracking and reconstructing the 3D pose and geometry of two hands in interaction is a challenging problem that has a high relevance for several human-computer interaction applications, including AR/VR, robotics, or sign language recognition. Existing works are either limited to simpler tracking settings (e.g., considering only a single hand or two spatially separated hands), or rely on less ubiquitous sensors, such as depth cameras. In contrast, in this work we present the first real-time method for motion capture of skeletal pose and 3D surface geometry of hands from a single RGB camera that explicitly considers close interactions. In order to address the inherent depth ambiguities in RGB data, we propose a novel multi-task CNN that regresses multiple complementary pieces of information, including segmentation, dense matchings to a 3D hand model, and 2D keypoint positions, together with newly proposed intra-hand relative depth and inter-hand distance maps. These predictions are subsequently used in a generative model fitting framework in order to estimate pose and shape parameters of a 3D hand model for both hands. We experimentally verify the individual components of our RGB two-hand tracking and 3D reconstruction pipeline through an extensive ablation study. Moreover, we demonstrate that our approach offers previously unseen two-hand tracking performance from RGB, and quantitatively and qualitatively outperforms existing RGB-based methods that were not explicitly designed for two-hand interactions. Moreover, our method even performs on-par with depth-based real-time methods.
* SIGGRAPH Asia 2020
Real-time Pose and Shape Reconstruction of Two Interacting Hands With a Single Depth Camera
Jun 15, 2021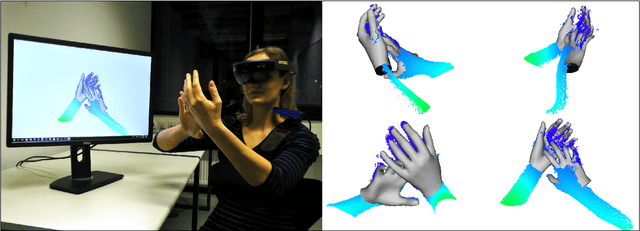
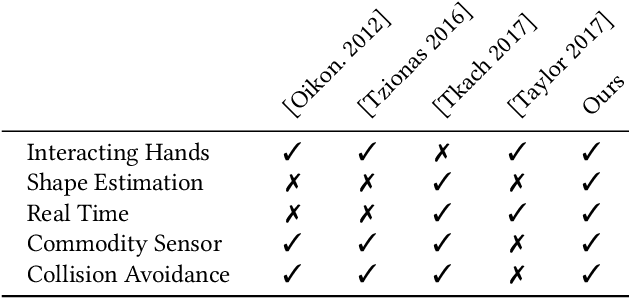
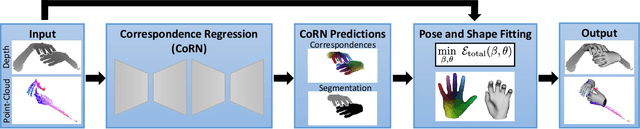

We present a novel method for real-time pose and shape reconstruction of two strongly interacting hands. Our approach is the first two-hand tracking solution that combines an extensive list of favorable properties, namely it is marker-less, uses a single consumer-level depth camera, runs in real time, handles inter- and intra-hand collisions, and automatically adjusts to the user's hand shape. In order to achieve this, we embed a recent parametric hand pose and shape model and a dense correspondence predictor based on a deep neural network into a suitable energy minimization framework. For training the correspondence prediction network, we synthesize a two-hand dataset based on physical simulations that includes both hand pose and shape annotations while at the same time avoiding inter-hand penetrations. To achieve real-time rates, we phrase the model fitting in terms of a nonlinear least-squares problem so that the energy can be optimized based on a highly efficient GPU-based Gauss-Newton optimizer. We show state-of-the-art results in scenes that exceed the complexity level demonstrated by previous work, including tight two-hand grasps, significant inter-hand occlusions, and gesture interaction.
Differentiable Event Stream Simulator for Non-Rigid 3D Tracking
Apr 30, 2021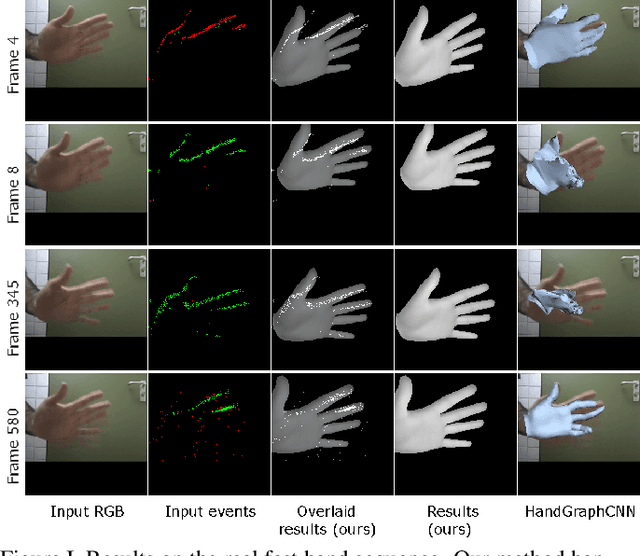
This paper introduces the first differentiable simulator of event streams, i.e., streams of asynchronous brightness change signals recorded by event cameras. Our differentiable simulator enables non-rigid 3D tracking of deformable objects (such as human hands, isometric surfaces and general watertight meshes) from event streams by leveraging an analysis-by-synthesis principle. So far, event-based tracking and reconstruction of non-rigid objects in 3D, like hands and body, has been either tackled using explicit event trajectories or large-scale datasets. In contrast, our method does not require any such processing or data, and can be readily applied to incoming event streams. We show the effectiveness of our approach for various types of non-rigid objects and compare to existing methods for non-rigid 3D tracking. In our experiments, the proposed energy-based formulations outperform competing RGB-based methods in terms of 3D errors. The source code and the new data are publicly available.
EventHands: Real-Time Neural 3D Hand Reconstruction from an Event Stream
Dec 14, 2020
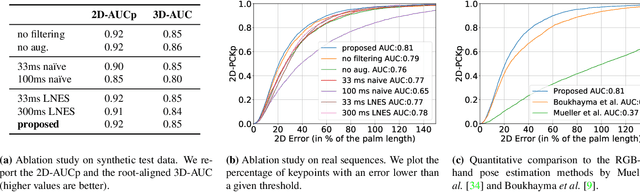


3D hand pose estimation from monocular videos is a long-standing and challenging problem, which is now seeing a strong upturn. In this work, we address it for the first time using a single event camera, i.e., an asynchronous vision sensor reacting on brightness changes. Our EventHands approach has characteristics previously not demonstrated with a single RGB or depth camera such as high temporal resolution at low data throughputs and real-time performance at 1000 Hz. Due to the different data modality of event cameras compared to classical cameras, existing methods cannot be directly applied to and re-trained for event streams. We thus design a new neural approach which accepts a new event stream representation suitable for learning, which is trained on newly-generated synthetic event streams and can generalise to real data. Experiments show that EventHands outperforms recent monocular methods using a colour (or depth) camera in terms of accuracy and its ability to capture hand motions of unprecedented speed. Our method, the event stream simulator and the dataset will be made publicly available.
Generative Model-Based Loss to the Rescue: A Method to Overcome Annotation Errors for Depth-Based Hand Pose Estimation
Jul 06, 2020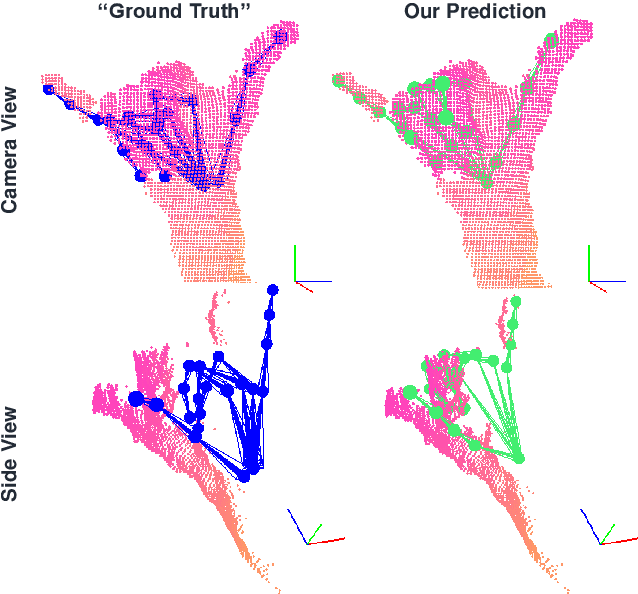
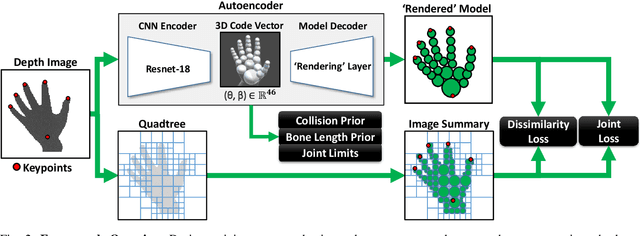
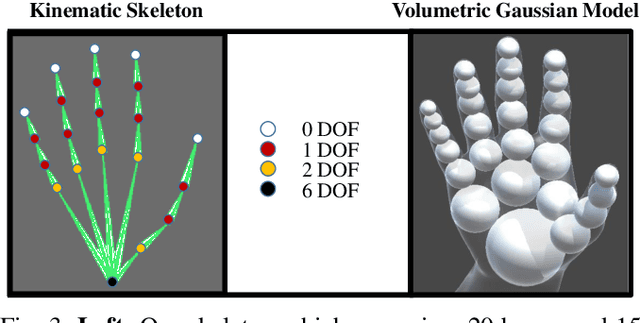

We propose to use a model-based generative loss for training hand pose estimators on depth images based on a volumetric hand model. This additional loss allows training of a hand pose estimator that accurately infers the entire set of 21 hand keypoints while only using supervision for 6 easy-to-annotate keypoints (fingertips and wrist). We show that our partially-supervised method achieves results that are comparable to those of fully-supervised methods which enforce articulation consistency. Moreover, for the first time we demonstrate that such an approach can be used to train on datasets that have erroneous annotations, i.e. "ground truth" with notable measurement errors, while obtaining predictions that explain the depth images better than the given "ground truth".
Convex Optimisation for Inverse Kinematics
Oct 24, 2019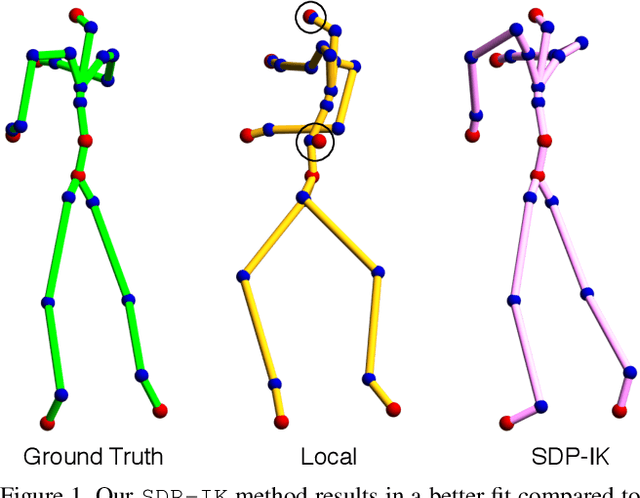
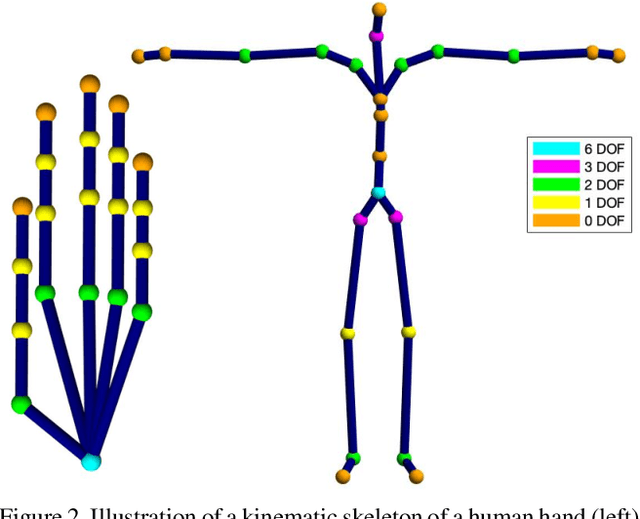
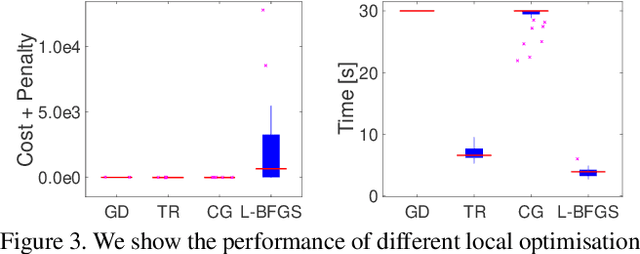
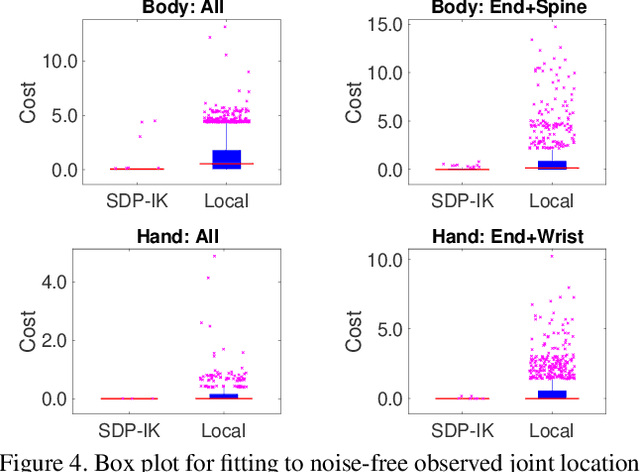
We consider the problem of inverse kinematics (IK), where one wants to find the parameters of a given kinematic skeleton that best explain a set of observed 3D joint locations. The kinematic skeleton has a tree structure, where each node is a joint that has an associated geometric transformation that is propagated to all its child nodes. The IK problem has various applications in vision and graphics, for example for tracking or reconstructing articulated objects, such as human hands or bodies. Most commonly, the IK problem is tackled using local optimisation methods. A major downside of these approaches is that, due to the non-convex nature of the problem, such methods are prone to converge to unwanted local optima and therefore require a good initialisation. In this paper we propose a convex optimisation approach for the IK problem based on semidefinite programming, which admits a polynomial-time algorithm that globally solves (a relaxation of) the IK problem. Experimentally, we demonstrate that the proposed method significantly outperforms local optimisation methods using different real-world skeletons.
XNect: Real-time Multi-person 3D Human Pose Estimation with a Single RGB Camera
Jul 01, 2019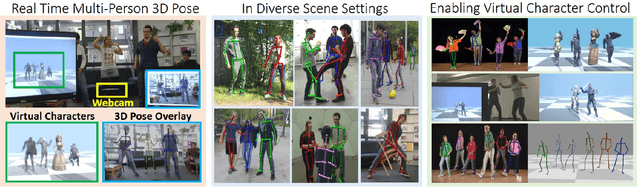
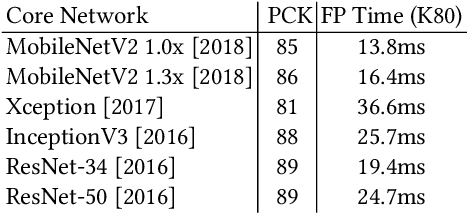
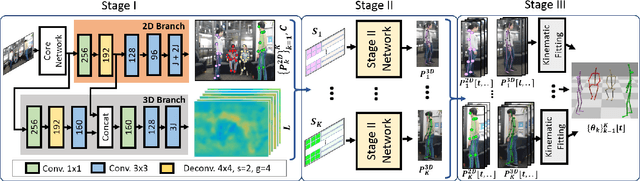
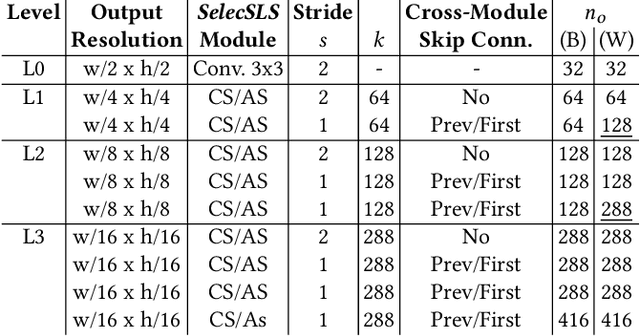
We present a real-time approach for multi-person 3D motion capture at over 30 fps using a single RGB camera. It operates in generic scenes and is robust to difficult occlusions both by other people and objects. Our method operates in subsequent stages. The first stage is a convolutional neural network (CNN) that estimates 2D and 3D pose features along with identity assignments for all visible joints of all individuals. We contribute a new architecture for this CNN, called SelecSLS Net, that uses novel selective long and short range skip connections to improve the information flow allowing for a drastically faster network without compromising accuracy. In the second stage, a fully-connected neural network turns the possibly partial (on account of occlusion) 2D pose and 3D pose features for each subject into a complete 3D pose estimate per individual. The third stage applies space-time skeletal model fitting to the predicted 2D and 3D pose per subject to further reconcile the 2D and 3D pose, and enforce temporal coherence. Our method returns the full skeletal pose in joint angles for each subject. This is a further key distinction from previous work that neither extracted global body positions nor joint angle results of a coherent skeleton in real time for multi-person scenes. The proposed system runs on consumer hardware at a previously unseen speed of more than 30 fps given 512x320 images as input while achieving state-of-the-art accuracy, which we will demonstrate on a range of challenging real-world scenes.