 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteraction-Centric Knowledge Infusion and Transfer for Open-Vocabulary Scene Graph Generation
Nov 08, 2025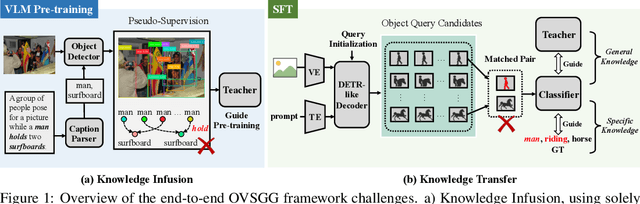
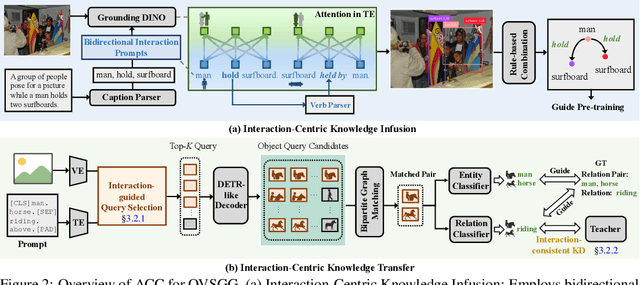
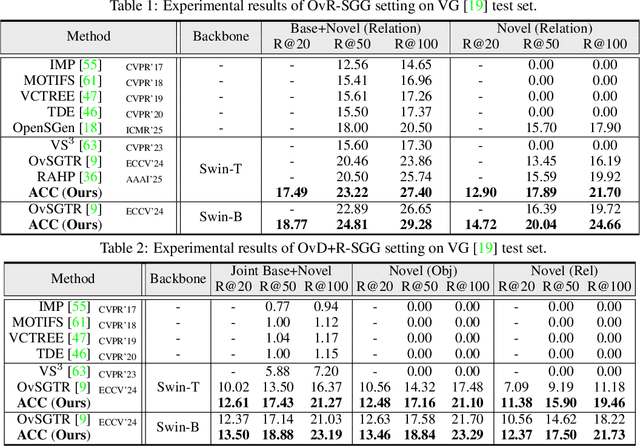
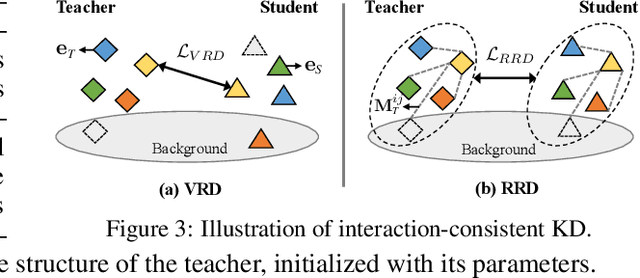
Open-vocabulary scene graph generation (OVSGG) extends traditional SGG by recognizing novel objects and relationships beyond predefined categories, leveraging the knowledge from pre-trained large-scale models. Existing OVSGG methods always adopt a two-stage pipeline: 1) \textit{Infusing knowledge} into large-scale models via pre-training on large datasets; 2) \textit{Transferring knowledge} from pre-trained models with fully annotated scene graphs during supervised fine-tuning. However, due to a lack of explicit interaction modeling, these methods struggle to distinguish between interacting and non-interacting instances of the same object category. This limitation induces critical issues in both stages of OVSGG: it generates noisy pseudo-supervision from mismatched objects during knowledge infusion, and causes ambiguous query matching during knowledge transfer. To this end, in this paper, we propose an inter\textbf{AC}tion-\textbf{C}entric end-to-end OVSGG framework (\textbf{ACC}) in an interaction-driven paradigm to minimize these mismatches. For \textit{interaction-centric knowledge infusion}, ACC employs a bidirectional interaction prompt for robust pseudo-supervision generation to enhance the model's interaction knowledge. For \textit{interaction-centric knowledge transfer}, ACC first adopts interaction-guided query selection that prioritizes pairing interacting objects to reduce interference from non-interacting ones. Then, it integrates interaction-consistent knowledge distillation to bolster robustness by pushing relational foreground away from the background while retaining general knowledge. Extensive experimental results on three benchmarks show that ACC achieves state-of-the-art performance, demonstrating the potential of interaction-centric paradigms for real-world applications.
V-Thinker: Interactive Thinking with Images
Nov 06, 2025Empowering Large Multimodal Models (LMMs) to deeply integrate image interaction with long-horizon reasoning capabilities remains a long-standing challenge in this field. Recent advances in vision-centric reasoning explore a promising "Thinking with Images" paradigm for LMMs, marking a shift from image-assisted reasoning to image-interactive thinking. While this milestone enables models to focus on fine-grained image regions, progress remains constrained by limited visual tool spaces and task-specific workflow designs. To bridge this gap, we present V-Thinker, a general-purpose multimodal reasoning assistant that enables interactive, vision-centric thinking through end-to-end reinforcement learning. V-Thinker comprises two key components: (1) a Data Evolution Flywheel that automatically synthesizes, evolves, and verifies interactive reasoning datasets across three dimensions-diversity, quality, and difficulty; and (2) a Visual Progressive Training Curriculum that first aligns perception via point-level supervision, then integrates interactive reasoning through a two-stage reinforcement learning framework. Furthermore, we introduce VTBench, an expert-verified benchmark targeting vision-centric interactive reasoning tasks. Extensive experiments demonstrate that V-Thinker consistently outperforms strong LMM-based baselines in both general and interactive reasoning scenarios, providing valuable insights for advancing image-interactive reasoning applications.
Patch-as-Decodable-Token: Towards Unified Multi-Modal Vision Tasks in MLLMs
Oct 02, 2025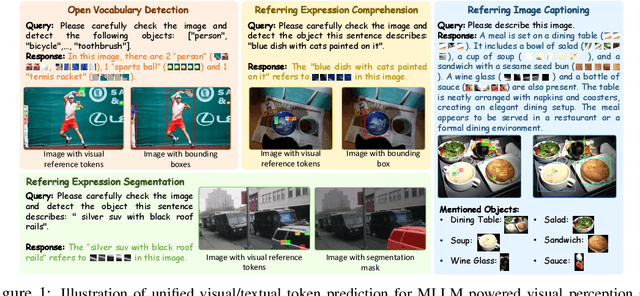
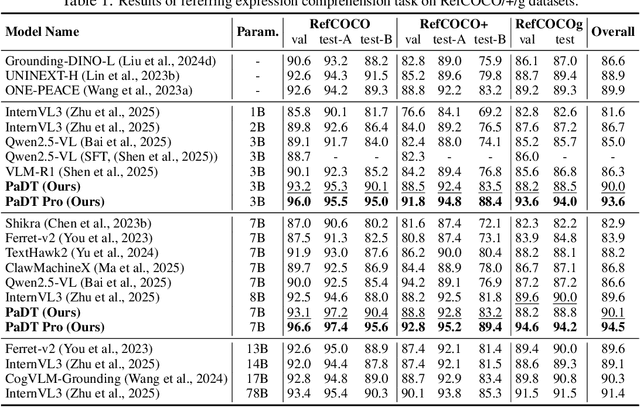
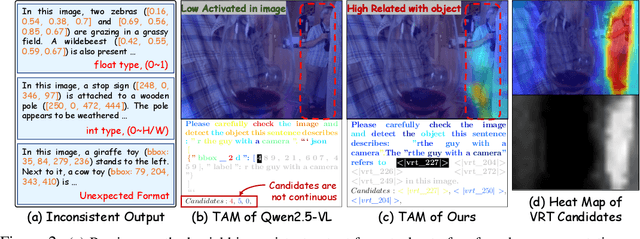
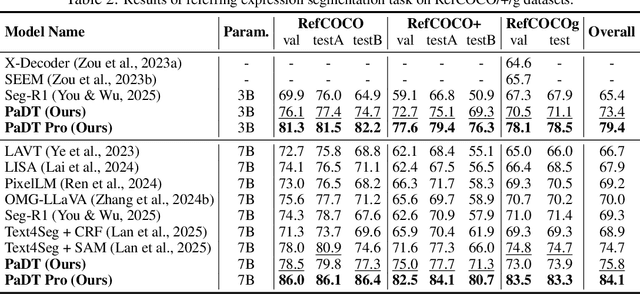
Multimodal large language models (MLLMs) have advanced rapidly in recent years. However, existing approaches for vision tasks often rely on indirect representations, such as generating coordinates as text for detection, which limits performance and prevents dense prediction tasks like segmentation. To overcome these challenges, we introduce Patch-as-Decodable Token (PaDT), a unified paradigm that enables MLLMs to directly generate both textual and diverse visual outputs. Central to PaDT are Visual Reference Tokens (VRTs), derived from visual patch embeddings of query images and interleaved seamlessly with LLM's output textual tokens. A lightweight decoder then transforms LLM's outputs into detection, segmentation, and grounding predictions. Unlike prior methods, PaDT processes VRTs independently at each forward pass and dynamically expands the embedding table, thus improving localization and differentiation among similar objects. We further tailor a training strategy for PaDT by randomly selecting VRTs for supervised fine-tuning and introducing a robust per-token cross-entropy loss. Our empirical studies across four visual perception and understanding tasks suggest PaDT consistently achieving state-of-the-art performance, even compared with significantly larger MLLM models. The code is available at https://github.com/Gorilla-Lab-SCUT/PaDT.
We-Math 2.0: A Versatile MathBook System for Incentivizing Visual Mathematical Reasoning
Aug 14, 2025Multimodal Large Language Models (MLLMs) have demonstrated impressive capabilities across various tasks, but still struggle with complex mathematical reasoning. Existing research primarily focuses on dataset construction and method optimization, often overlooking two critical aspects: comprehensive knowledge-driven design and model-centric data space modeling. In this paper, we introduce We-Math 2.0, a unified system that integrates a structured mathematical knowledge system, model-centric data space modeling, and a reinforcement learning (RL)-based training paradigm to comprehensively enhance the mathematical reasoning abilities of MLLMs. The key contributions of We-Math 2.0 are fourfold: (1) MathBook Knowledge System: We construct a five-level hierarchical system encompassing 491 knowledge points and 1,819 fundamental principles. (2) MathBook-Standard & Pro: We develop MathBook-Standard, a dataset that ensures broad conceptual coverage and flexibility through dual expansion. Additionally, we define a three-dimensional difficulty space and generate 7 progressive variants per problem to build MathBook-Pro, a challenging dataset for robust training. (3) MathBook-RL: We propose a two-stage RL framework comprising: (i) Cold-Start Fine-tuning, which aligns the model with knowledge-oriented chain-of-thought reasoning; and (ii) Progressive Alignment RL, leveraging average-reward learning and dynamic data scheduling to achieve progressive alignment across difficulty levels. (4) MathBookEval: We introduce a comprehensive benchmark covering all 491 knowledge points with diverse reasoning step distributions. Experimental results show that MathBook-RL performs competitively with existing baselines on four widely-used benchmarks and achieves strong results on MathBookEval, suggesting promising generalization in mathematical reasoning.
Text-guided Visual Prompt DINO for Generic Segmentation
Aug 08, 2025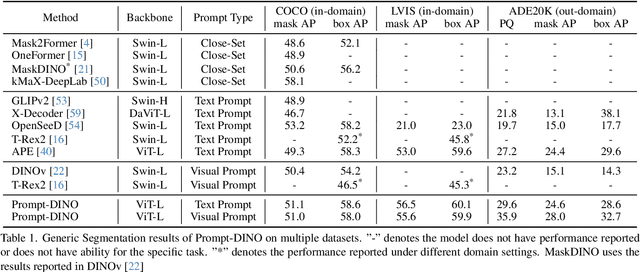
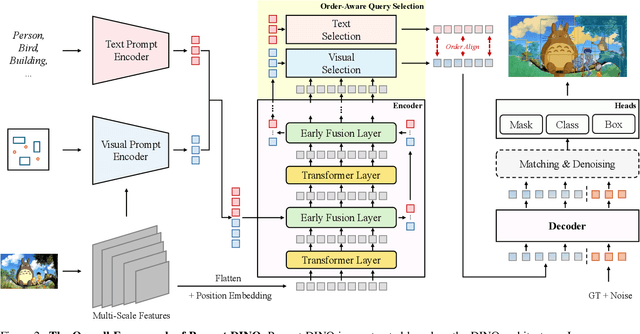
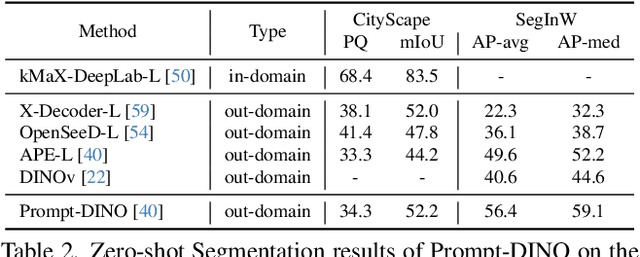
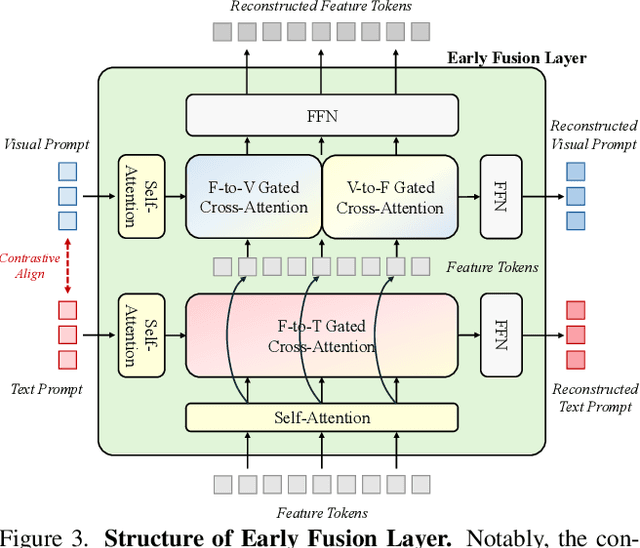
Recent advancements in multimodal vision models have highlighted limitations in late-stage feature fusion and suboptimal query selection for hybrid prompts open-world segmentation, alongside constraints from caption-derived vocabularies. To address these challenges, we propose Prompt-DINO, a text-guided visual Prompt DINO framework featuring three key innovations. First, we introduce an early fusion mechanism that unifies text/visual prompts and backbone features at the initial encoding stage, enabling deeper cross-modal interactions to resolve semantic ambiguities. Second, we design order-aligned query selection for DETR-based architectures, explicitly optimizing the structural alignment between text and visual queries during decoding to enhance semantic-spatial consistency. Third, we develop a generative data engine powered by the Recognize Anything via Prompting (RAP) model, which synthesizes 0.5B diverse training instances through a dual-path cross-verification pipeline, reducing label noise by 80.5% compared to conventional approaches. Extensive experiments demonstrate that Prompt-DINO achieves state-of-the-art performance on open-world detection benchmarks while significantly expanding semantic coverage beyond fixed-vocabulary constraints. Our work establishes a new paradigm for scalable multimodal detection and data generation in open-world scenarios. Data&Code are available at https://github.com/WeChatCV/WeVisionOne.
Scalable Autoregressive 3D Molecule Generation
May 20, 2025Generative models of 3D molecular structure play a rapidly growing role in the design and simulation of molecules. Diffusion models currently dominate the space of 3D molecule generation, while autoregressive models have trailed behind. In this work, we present Quetzal, a simple but scalable autoregressive model that builds molecules atom-by-atom in 3D. Treating each molecule as an ordered sequence of atoms, Quetzal combines a causal transformer that predicts the next atom's discrete type with a smaller Diffusion MLP that models the continuous next-position distribution. Compared to existing autoregressive baselines, Quetzal achieves substantial improvements in generation quality and is competitive with the performance of state-of-the-art diffusion models. In addition, by reducing the number of expensive forward passes through a dense transformer, Quetzal enables significantly faster generation speed, as well as exact divergence-based likelihood computation. Finally, without any architectural changes, Quetzal natively handles variable-size tasks like hydrogen decoration and scaffold completion. We hope that our work motivates a perspective on scalability and generality for generative modelling of 3D molecules.
Towards Efficient Multi-Scale Deformable Attention on NPU
May 20, 2025



Multi-scale deformable attention (MSDA) is a flexible and powerful feature extraction mechanism for visual tasks, but its random-access grid sampling strategy poses significant optimization challenges, especially on domain-specific accelerators such as NPUs. In this work, we present a co-design approach that systematically rethinks memory access and computation strategies for MSDA on the Ascend NPU architecture. With this co-design approach, our implementation supports both efficient forward and backward computation, is fully adapted for training workloads, and incorporates a suite of hardware-aware optimizations. Extensive experiments show that our solution achieves up to $5.9\times$ (forward), $8.9\times$ (backward), and $7.3\times$ (end-to-end training) speedup over the grid sample-based baseline, and $1.9\times$, $2.4\times$, and $2.0\times$ acceleration over the latest vendor library, respectively.
Video-GPT via Next Clip Diffusion
May 18, 2025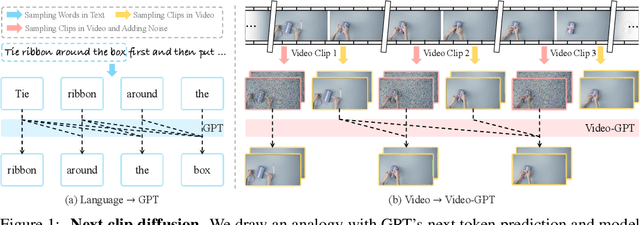
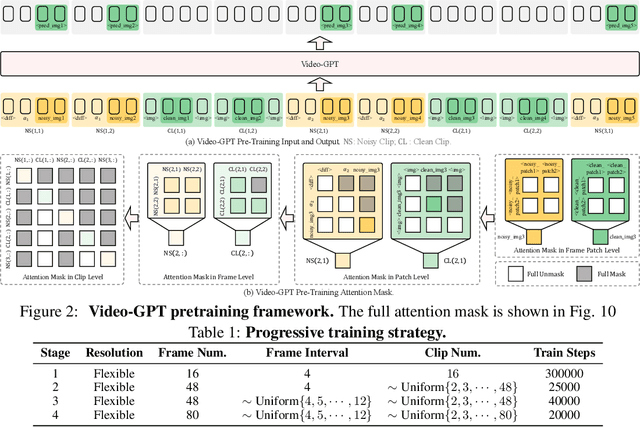
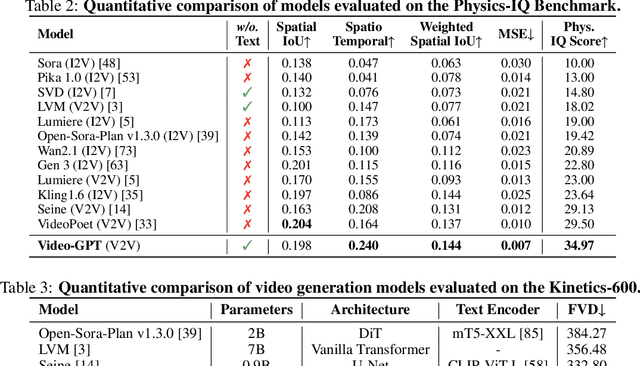
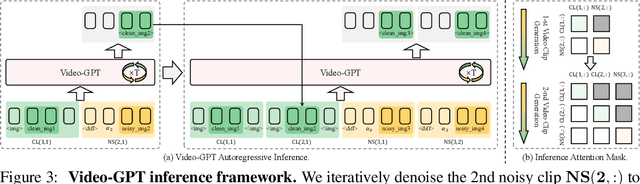
GPT has shown its remarkable success in natural language processing. However, the language sequence is not sufficient to describe spatial-temporal details in the visual world. Alternatively, the video sequence is good at capturing such details. Motivated by this fact, we propose a concise Video-GPT in this paper by treating video as new language for visual world modeling. By analogy to next token prediction in GPT, we introduce a novel next clip diffusion paradigm for pretraining Video-GPT. Different from the previous works, this distinct paradigm allows Video-GPT to tackle both short-term generation and long-term prediction, by autoregressively denoising the noisy clip according to the clean clips in the history. Extensive experiments show our Video-GPT achieves the state-of-the-art performance on video prediction, which is the key factor towards world modeling (Physics-IQ Benchmark: Video-GPT 34.97 vs. Kling 23.64 vs. Wan 20.89). Moreover, it can be well adapted on 6 mainstream video tasks in both video generation and understanding, showing its great generalization capacity in downstream. The project page is at https://Video-GPT.github.io.
Get In Video: Add Anything You Want to the Video
Mar 08, 2025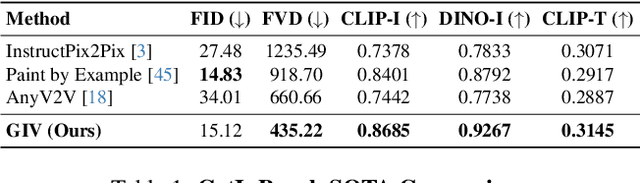
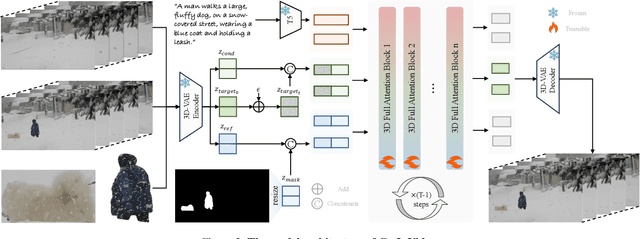
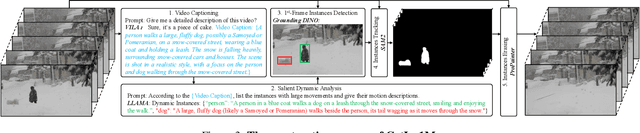
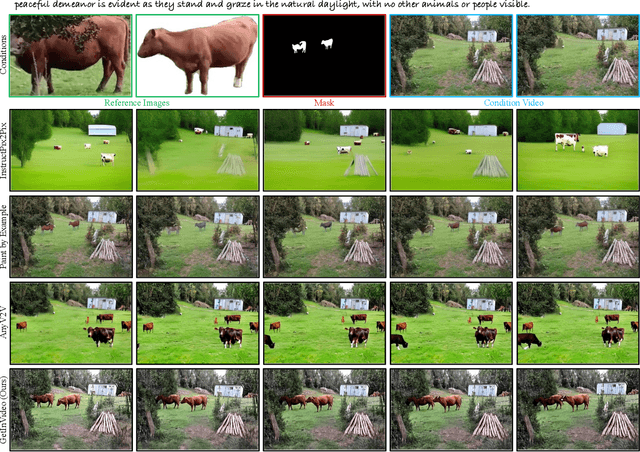
Video editing increasingly demands the ability to incorporate specific real-world instances into existing footage, yet current approaches fundamentally fail to capture the unique visual characteristics of particular subjects and ensure natural instance/scene interactions. We formalize this overlooked yet critical editing paradigm as "Get-In-Video Editing", where users provide reference images to precisely specify visual elements they wish to incorporate into videos. Addressing this task's dual challenges, severe training data scarcity and technical challenges in maintaining spatiotemporal coherence, we introduce three key contributions. First, we develop GetIn-1M dataset created through our automated Recognize-Track-Erase pipeline, which sequentially performs video captioning, salient instance identification, object detection, temporal tracking, and instance removal to generate high-quality video editing pairs with comprehensive annotations (reference image, tracking mask, instance prompt). Second, we present GetInVideo, a novel end-to-end framework that leverages a diffusion transformer architecture with 3D full attention to process reference images, condition videos, and masks simultaneously, maintaining temporal coherence, preserving visual identity, and ensuring natural scene interactions when integrating reference objects into videos. Finally, we establish GetInBench, the first comprehensive benchmark for Get-In-Video Editing scenario, demonstrating our approach's superior performance through extensive evaluations. Our work enables accessible, high-quality incorporation of specific real-world subjects into videos, significantly advancing personalized video editing capabilities.
WeGen: A Unified Model for Interactive Multimodal Generation as We Chat
Mar 03, 2025Existing multimodal generative models fall short as qualified design copilots, as they often struggle to generate imaginative outputs once instructions are less detailed or lack the ability to maintain consistency with the provided references. In this work, we introduce WeGen, a model that unifies multimodal generation and understanding, and promotes their interplay in iterative generation. It can generate diverse results with high creativity for less detailed instructions. And it can progressively refine prior generation results or integrating specific contents from references following the instructions in its chat with users. During this process, it is capable of preserving consistency in the parts that the user is already satisfied with. To this end, we curate a large-scale dataset, extracted from Internet videos, containing rich object dynamics and auto-labeled dynamics descriptions by advanced foundation models to date. These two information are interleaved into a single sequence to enable WeGen to learn consistency-aware generation where the specified dynamics are generated while the consistency of unspecified content is preserved aligned with instructions. Besides, we introduce a prompt self-rewriting mechanism to enhance generation diversity. Extensive experiments demonstrate the effectiveness of unifying multimodal understanding and generation in WeGen and show it achieves state-of-the-art performance across various visual generation benchmarks. These also demonstrate the potential of WeGen as a user-friendly design copilot as desired. The code and models will be available at https://github.com/hzphzp/WeGen.