 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Predictive Control with Differentiable World Models for Offline Reinforcement Learning
Mar 23, 2026Offline Reinforcement Learning (RL) aims to learn optimal policies from fixed offline datasets, without further interactions with the environment. Such methods train an offline policy (or value function), and apply it at inference time without further refinement. We introduce an inference time adaptation framework inspired by model predictive control (MPC) that utilizes a pretrained policy along with a learned world model of state transitions and rewards. While existing world model and diffusion-planning methods use learned dynamics to generate imagined trajectories during training, or to sample candidate plans at inference time, they do not use inference-time information to optimize the policy parameters on the fly. In contrast, our design is a Differentiable World Model (DWM) pipeline that enables endto-end gradient computation through imagined rollouts for policy optimization at inference time based on MPC. We evaluate our algorithm on D4RL continuous-control benchmarks (MuJoCo locomotion tasks and AntMaze), and show that exploiting inference-time information to optimize the policy parameters yields consistent gains over strong offline RL baselines.
Gradual Fine-Tuning for Flow Matching Models
Jan 30, 2026Fine-tuning flow matching models is a central challenge in settings with limited data, evolving distributions, or strict efficiency demands, where unconstrained fine-tuning can erode the accuracy and efficiency gains learned during pretraining. Prior work has produced theoretical guarantees and empirical advances for reward-based fine-tuning formulations, but these methods often impose restrictions on permissible drift structure or training techniques. In this work, we propose Gradual Fine-Tuning (GFT), a principled framework for fine-tuning flow-based generative models when samples from the target distribution are available. For stochastic flows, GFT defines a temperature-controlled sequence of intermediate objectives that smoothly interpolate between the pretrained and target drifts, approaching the true target as the temperature approaches zero. We prove convergence results for both marginal and conditional GFT objectives, enabling the use of suitable (e.g., optimal transport) couplings during GFT while preserving correctness. Empirically, GFT improves convergence stability and shortens probability paths, resulting in faster inference, while maintaining generation quality comparable to standard fine-tuning. Our results position GFT as a theoretically grounded and practically effective alternative for scalable adaptation of flow matching models under distribution shift.
Sketched Gaussian Mechanism for Private Federated Learning
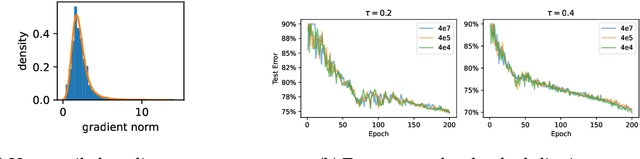
Sep 09, 2025Communication cost and privacy are two major considerations in federated learning (FL). For communication cost, gradient compression by sketching the clients' transmitted model updates is often used for reducing per-round communication. For privacy, the Gaussian mechanism (GM), which consists of clipping updates and adding Gaussian noise, is commonly used to guarantee client-level differential privacy. Existing literature on private FL analyzes privacy of sketching and GM in an isolated manner, illustrating that sketching provides privacy determined by the sketching dimension and that GM has to supply any additional desired privacy. In this paper, we introduce the Sketched Gaussian Mechanism (SGM), which directly combines sketching and the Gaussian mechanism for privacy. Using R\'enyi-DP tools, we present a joint analysis of SGM's overall privacy guarantee, which is significantly more flexible and sharper compared to isolated analysis of sketching and GM privacy. In particular, we prove that the privacy level of SGM for a fixed noise magnitude is proportional to $1/\sqrt{b}$, where $b$ is the sketching dimension, indicating that (for moderate $b$) SGM can provide much stronger privacy guarantees than the original GM under the same noise budget. We demonstrate the application of SGM to FL with either gradient descent or adaptive server optimizers, and establish theoretical results on optimization convergence, which exhibits only a logarithmic dependence on the number of parameters $d$. Experimental results confirm that at the same privacy level, SGM based FL is at least competitive with non-sketching private FL variants and outperforms them in some settings. Moreover, using adaptive optimization at the server improves empirical performance while maintaining the privacy guarantees.
Conservative Contextual Bandits: Beyond Linear Representations
Dec 09, 2024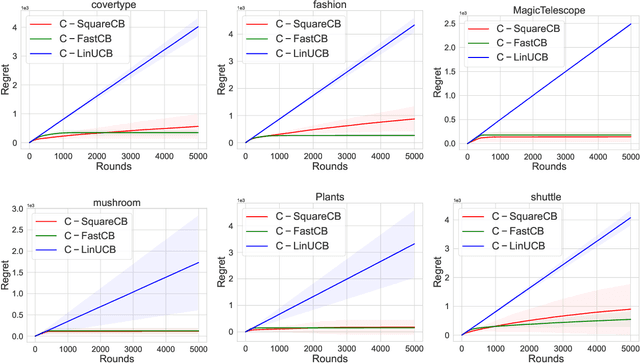

Conservative Contextual Bandits (CCBs) address safety in sequential decision making by requiring that an agent's policy, along with minimizing regret, also satisfies a safety constraint: the performance is not worse than a baseline policy (e.g., the policy that the company has in production) by more than $(1+\alpha)$ factor. Prior work developed UCB-style algorithms in the multi-armed [Wu et al., 2016] and contextual linear [Kazerouni et al., 2017] settings. However, in practice the cost of the arms is often a non-linear function, and therefore existing UCB algorithms are ineffective in such settings. In this paper, we consider CCBs beyond the linear case and develop two algorithms $\mathtt{C-SquareCB}$ and $\mathtt{C-FastCB}$, using Inverse Gap Weighting (IGW) based exploration and an online regression oracle. We show that the safety constraint is satisfied with high probability and that the regret of $\mathtt{C-SquareCB}$ is sub-linear in horizon $T$, while the regret of $\mathtt{C-FastCB}$ is first-order and is sub-linear in $L^*$, the cumulative loss of the optimal policy. Subsequently, we use a neural network for function approximation and online gradient descent as the regression oracle to provide $\tilde{O}(\sqrt{KT} + K/\alpha) $ and $\tilde{O}(\sqrt{KL^*} + K (1 + 1/\alpha))$ regret bounds, respectively. Finally, we demonstrate the efficacy of our algorithms on real-world data and show that they significantly outperform the existing baseline while maintaining the performance guarantee.
Sketched Adaptive Federated Deep Learning: A Sharp Convergence Analysis
Nov 12, 2024
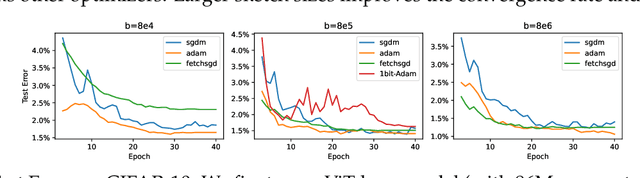
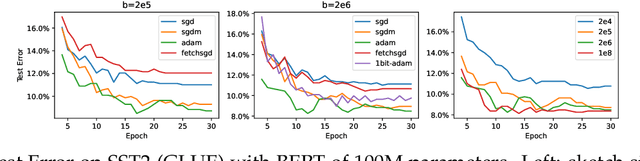
Combining gradient compression methods (e.g., CountSketch, quantization) and adaptive optimizers (e.g., Adam, AMSGrad) is a desirable goal in federated learning (FL), with potential benefits on both fewer communication rounds and less per-round communication. In spite of the preliminary empirical success of sketched adaptive methods, existing convergence analyses show the communication cost to have a linear dependence on the ambient dimension, i.e., number of parameters, which is prohibitively high for modern deep learning models. In this work, we introduce specific sketched adaptive federated learning (SAFL) algorithms and, as our main contribution, provide theoretical convergence analyses in different FL settings with guarantees on communication cost depending only logarithmically (instead of linearly) on the ambient dimension. Unlike existing analyses, we show that the entry-wise sketching noise existent in the preconditioners and the first moments of SAFL can be implicitly addressed by leveraging the recently-popularized anisotropic curvatures in deep learning losses, e.g., fast decaying loss Hessian eigen-values. In the i.i.d. client setting of FL, we show that SAFL achieves asymptotic $O(1/\sqrt{T})$ convergence, and converges faster in the initial epochs. In the non-i.i.d. client setting, where non-adaptive methods lack convergence guarantees, we show that SACFL (SAFL with clipping) algorithms can provably converge in spite of the additional heavy-tailed noise. Our theoretical claims are supported by empirical studies on vision and language tasks, and in both fine-tuning and training-from-scratch regimes. Surprisingly, as a by-product of our analysis, the proposed SAFL methods are competitive with the state-of-the-art communication-efficient federated learning algorithms based on error feedback.
On the Generalizability of Foundation Models for Crop Type Mapping
Sep 14, 2024Foundation models pre-trained using self-supervised and weakly-supervised learning have shown powerful transfer learning capabilities on various downstream tasks, including language understanding, text generation, and image recognition. Recently, the Earth observation (EO) field has produced several foundation models pre-trained directly on multispectral satellite imagery (e.g., Sentinel-2) for applications like precision agriculture, wildfire and drought monitoring, and natural disaster response. However, few studies have investigated the ability of these models to generalize to new geographic locations, and potential concerns of geospatial bias -- models trained on data-rich developed countries not transferring well to data-scarce developing countries -- remain. We investigate the ability of popular EO foundation models to transfer to new geographic regions in the agricultural domain, where differences in farming practices and class imbalance make transfer learning particularly challenging. We first select six crop classification datasets across five continents, normalizing for dataset size and harmonizing classes to focus on four major cereal grains: maize, soybean, rice, and wheat. We then compare three popular foundation models, pre-trained on SSL4EO-S12, SatlasPretrain, and ImageNet, using in-distribution (ID) and out-of-distribution (OOD) evaluation. Experiments show that pre-trained weights designed explicitly for Sentinel-2, such as SSL4EO-S12, outperform general pre-trained weights like ImageNet. Furthermore, the benefits of pre-training on OOD data are the most significant when only 10--100 ID training samples are used. Transfer learning and pre-training with OOD and limited ID data show promising applications, as many developing regions have scarce crop type labels. All harmonized datasets and experimental code are open-source and available for download.
Optimization and Generalization Guarantees for Weight Normalization
Sep 13, 2024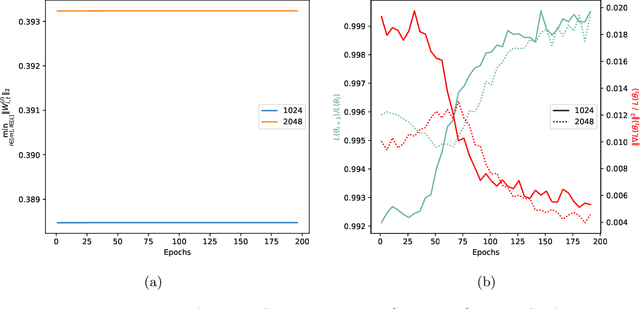
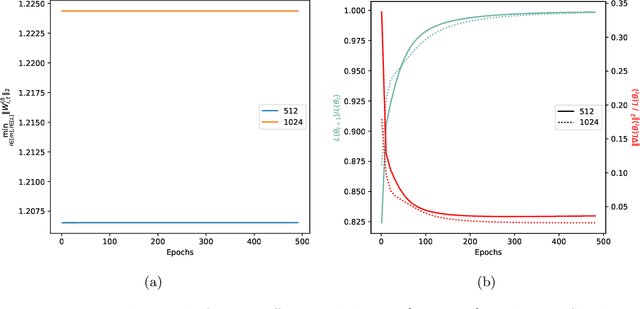
Weight normalization (WeightNorm) is widely used in practice for the training of deep neural networks and modern deep learning libraries have built-in implementations of it. In this paper, we provide the first theoretical characterizations of both optimization and generalization of deep WeightNorm models with smooth activation functions. For optimization, from the form of the Hessian of the loss, we note that a small Hessian of the predictor leads to a tractable analysis. Thus, we bound the spectral norm of the Hessian of WeightNorm networks and show its dependence on the network width and weight normalization terms--the latter being unique to networks without WeightNorm. Then, we use this bound to establish training convergence guarantees under suitable assumptions for gradient decent. For generalization, we use WeightNorm to get a uniform convergence based generalization bound, which is independent from the width and depends sublinearly on the depth. Finally, we present experimental results which illustrate how the normalization terms and other quantities of theoretical interest relate to the training of WeightNorm networks.
Loss Gradient Gaussian Width based Generalization and Optimization Guarantees
Jun 11, 2024Generalization and optimization guarantees on the population loss in machine learning often rely on uniform convergence based analysis, typically based on the Rademacher complexity of the predictors. The rich representation power of modern models has led to concerns about this approach. In this paper, we present generalization and optimization guarantees in terms of the complexity of the gradients, as measured by the Loss Gradient Gaussian Width (LGGW). First, we introduce generalization guarantees directly in terms of the LGGW under a flexible gradient domination condition, which we demonstrate to hold empirically for deep models. Second, we show that sample reuse in finite sum (stochastic) optimization does not make the empirical gradient deviate from the population gradient as long as the LGGW is small. Third, focusing on deep networks, we present results showing how to bound their LGGW under mild assumptions. In particular, we show that their LGGW can be bounded (a) by the $L_2$-norm of the loss Hessian eigenvalues, which has been empirically shown to be $\tilde{O}(1)$ for commonly used deep models; and (b) in terms of the Gaussian width of the featurizer, i.e., the output of the last-but-one layer. To our knowledge, our generalization and optimization guarantees in terms of LGGW are the first results of its kind, avoid the pitfalls of predictor Rademacher complexity based analysis, and hold considerable promise towards quantitatively tight bounds for deep models.
Contextual Bandits with Online Neural Regression
Dec 12, 2023



Recent works have shown a reduction from contextual bandits to online regression under a realizability assumption [Foster and Rakhlin, 2020, Foster and Krishnamurthy, 2021]. In this work, we investigate the use of neural networks for such online regression and associated Neural Contextual Bandits (NeuCBs). Using existing results for wide networks, one can readily show a ${\mathcal{O}}(\sqrt{T})$ regret for online regression with square loss, which via the reduction implies a ${\mathcal{O}}(\sqrt{K} T^{3/4})$ regret for NeuCBs. Departing from this standard approach, we first show a $\mathcal{O}(\log T)$ regret for online regression with almost convex losses that satisfy QG (Quadratic Growth) condition, a generalization of the PL (Polyak-\L ojasiewicz) condition, and that have a unique minima. Although not directly applicable to wide networks since they do not have unique minima, we show that adding a suitable small random perturbation to the network predictions surprisingly makes the loss satisfy QG with unique minima. Based on such a perturbed prediction, we show a ${\mathcal{O}}(\log T)$ regret for online regression with both squared loss and KL loss, and subsequently convert these respectively to $\tilde{\mathcal{O}}(\sqrt{KT})$ and $\tilde{\mathcal{O}}(\sqrt{KL^*} + K)$ regret for NeuCB, where $L^*$ is the loss of the best policy. Separately, we also show that existing regret bounds for NeuCBs are $\Omega(T)$ or assume i.i.d. contexts, unlike this work. Finally, our experimental results on various datasets demonstrate that our algorithms, especially the one based on KL loss, persistently outperform existing algorithms.
AmbientFlow: Invertible generative models from incomplete, noisy measurements
Sep 09, 2023Generative models have gained popularity for their potential applications in imaging science, such as image reconstruction, posterior sampling and data sharing. Flow-based generative models are particularly attractive due to their ability to tractably provide exact density estimates along with fast, inexpensive and diverse samples. Training such models, however, requires a large, high quality dataset of objects. In applications such as computed imaging, it is often difficult to acquire such data due to requirements such as long acquisition time or high radiation dose, while acquiring noisy or partially observed measurements of these objects is more feasible. In this work, we propose AmbientFlow, a framework for learning flow-based generative models directly from noisy and incomplete data. Using variational Bayesian methods, a novel framework for establishing flow-based generative models from noisy, incomplete data is proposed. Extensive numerical studies demonstrate the effectiveness of AmbientFlow in correctly learning the object distribution. The utility of AmbientFlow in a downstream inference task of image reconstruction is demonstrated.