 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative Scenario Rollouts for End-to-End Autonomous Driving
Jan 16, 2026Vision-Language-Action (VLA) models are emerging as highly effective planning models for end-to-end autonomous driving systems. However, current works mostly rely on imitation learning from sparse trajectory annotations and under-utilize their potential as generative models. We propose Generative Scenario Rollouts (GeRo), a plug-and-play framework for VLA models that jointly performs planning and generation of language-grounded future traffic scenes through an autoregressive rollout strategy. First, a VLA model is trained to encode ego vehicle and agent dynamics into latent tokens under supervision from planning, motion, and language tasks, facilitating text-aligned generation. Next, GeRo performs language-conditioned autoregressive generation. Given multi-view images, a scenario description, and ego-action questions, it generates future latent tokens and textual responses to guide long-horizon rollouts. A rollout-consistency loss stabilizes predictions using ground truth or pseudo-labels, mitigating drift and preserving text-action alignment. This design enables GeRo to perform temporally consistent, language-grounded rollouts that support long-horizon reasoning and multi-agent planning. On Bench2Drive, GeRo improves driving score and success rate by +15.7 and +26.2, respectively. By integrating reinforcement learning with generative rollouts, GeRo achieves state-of-the-art closed-loop and open-loop performance, demonstrating strong zero-shot robustness. These results highlight the promise of generative, language-conditioned reasoning as a foundation for safer and more interpretable end-to-end autonomous driving.
RoCA: Robust Cross-Domain End-to-End Autonomous Driving
Jun 11, 2025End-to-end (E2E) autonomous driving has recently emerged as a new paradigm, offering significant potential. However, few studies have looked into the practical challenge of deployment across domains (e.g., cities). Although several works have incorporated Large Language Models (LLMs) to leverage their open-world knowledge, LLMs do not guarantee cross-domain driving performance and may incur prohibitive retraining costs during domain adaptation. In this paper, we propose RoCA, a novel framework for robust cross-domain E2E autonomous driving. RoCA formulates the joint probabilistic distribution over the tokens that encode ego and surrounding vehicle information in the E2E pipeline. Instantiating with a Gaussian process (GP), RoCA learns a set of basis tokens with corresponding trajectories, which span diverse driving scenarios. Then, given any driving scene, it is able to probabilistically infer the future trajectory. By using RoCA together with a base E2E model in source-domain training, we improve the generalizability of the base model, without requiring extra inference computation. In addition, RoCA enables robust adaptation on new target domains, significantly outperforming direct finetuning. We extensively evaluate RoCA on various cross-domain scenarios and show that it achieves strong domain generalization and adaptation performance.
Can Vision-Language Models Answer Face to Face Questions in the Real-World?
Mar 25, 2025AI models have made significant strides in recent years in their ability to describe and answer questions about real-world images. They have also made progress in the ability to converse with users in real-time using audio input. This raises the question: have we reached the point where AI models, connected to a camera and microphone, can converse with users in real-time about scenes and events that are unfolding live in front of the camera? This has been a long-standing goal in AI and is a prerequisite for real-world AI assistants and humanoid robots to interact with humans in everyday situations. In this work, we introduce a new dataset and benchmark, the Qualcomm Interactive Video Dataset (IVD), which allows us to assess the extent to which existing models can support these abilities, and to what degree these capabilities can be instilled through fine-tuning. The dataset is based on a simple question-answering setup, where users ask questions that the system has to answer, in real-time, based on the camera and audio input. We show that existing models fall far behind human performance on this task, and we identify the main sources for the performance gap. However, we also show that for many of the required perceptual skills, fine-tuning on this form of data can significantly reduce this gap.
Distilling Multi-modal Large Language Models for Autonomous Driving
Jan 16, 2025
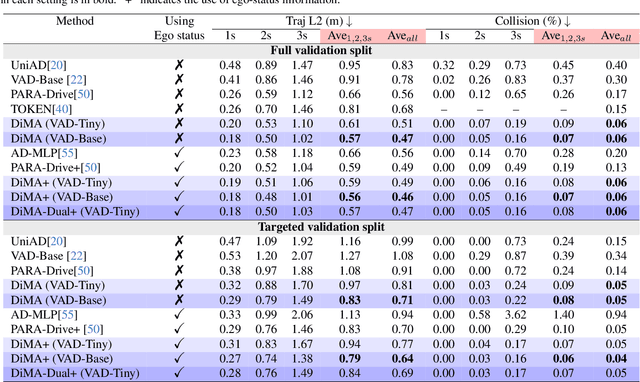

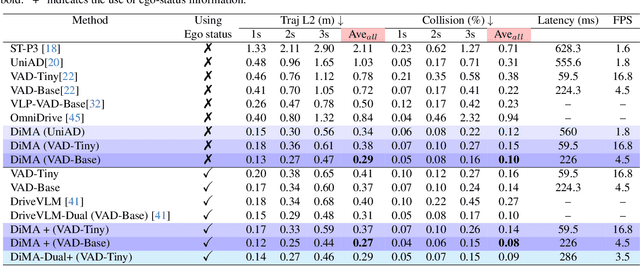
Autonomous driving demands safe motion planning, especially in critical "long-tail" scenarios. Recent end-to-end autonomous driving systems leverage large language models (LLMs) as planners to improve generalizability to rare events. However, using LLMs at test time introduces high computational costs. To address this, we propose DiMA, an end-to-end autonomous driving system that maintains the efficiency of an LLM-free (or vision-based) planner while leveraging the world knowledge of an LLM. DiMA distills the information from a multi-modal LLM to a vision-based end-to-end planner through a set of specially designed surrogate tasks. Under a joint training strategy, a scene encoder common to both networks produces structured representations that are semantically grounded as well as aligned to the final planning objective. Notably, the LLM is optional at inference, enabling robust planning without compromising on efficiency. Training with DiMA results in a 37% reduction in the L2 trajectory error and an 80% reduction in the collision rate of the vision-based planner, as well as a 44% trajectory error reduction in longtail scenarios. DiMA also achieves state-of-the-art performance on the nuScenes planning benchmark.
ClevrSkills: Compositional Language and Visual Reasoning in Robotics
Nov 13, 2024



Robotics tasks are highly compositional by nature. For example, to perform a high-level task like cleaning the table a robot must employ low-level capabilities of moving the effectors to the objects on the table, pick them up and then move them off the table one-by-one, while re-evaluating the consequently dynamic scenario in the process. Given that large vision language models (VLMs) have shown progress on many tasks that require high level, human-like reasoning, we ask the question: if the models are taught the requisite low-level capabilities, can they compose them in novel ways to achieve interesting high-level tasks like cleaning the table without having to be explicitly taught so? To this end, we present ClevrSkills - a benchmark suite for compositional reasoning in robotics. ClevrSkills is an environment suite developed on top of the ManiSkill2 simulator and an accompanying dataset. The dataset contains trajectories generated on a range of robotics tasks with language and visual annotations as well as multi-modal prompts as task specification. The suite includes a curriculum of tasks with three levels of compositional understanding, starting with simple tasks requiring basic motor skills. We benchmark multiple different VLM baselines on ClevrSkills and show that even after being pre-trained on large numbers of tasks, these models fail on compositional reasoning in robotics tasks.
Live Fitness Coaching as a Testbed for Situated Interaction
Jul 11, 2024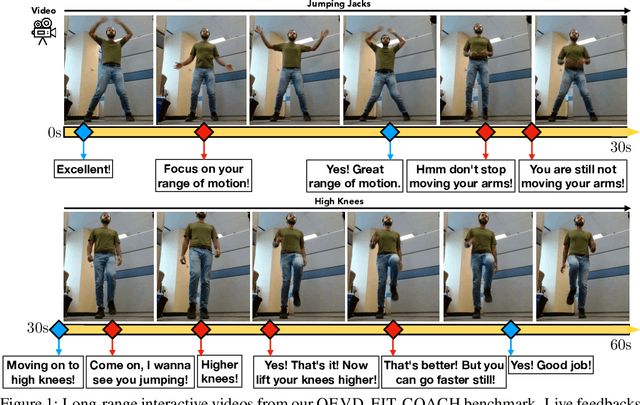



Tasks at the intersection of vision and language have had a profound impact in advancing the capabilities of vision-language models such as dialog-based assistants. However, models trained on existing tasks are largely limited to turn-based interactions, where each turn must be stepped (i.e., prompted) by the user. Open-ended, asynchronous interactions where an AI model may proactively deliver timely responses or feedback based on the unfolding situation in real-time are an open challenge. In this work, we present the QEVD benchmark and dataset which explores human-AI interaction in the challenging, yet controlled, real-world domain of fitness coaching - a task which intrinsically requires monitoring live user activity and providing timely feedback. It is the first benchmark that requires assistive vision-language models to recognize complex human actions, identify mistakes grounded in those actions, and provide appropriate feedback. Our experiments reveal the limitations of existing state of the art vision-language models for such asynchronous situated interactions. Motivated by this, we propose a simple end-to-end streaming baseline that can respond asynchronously to human actions with appropriate feedbacks at the appropriate time.
Painter: Teaching Auto-regressive Language Models to Draw Sketches
Aug 16, 2023

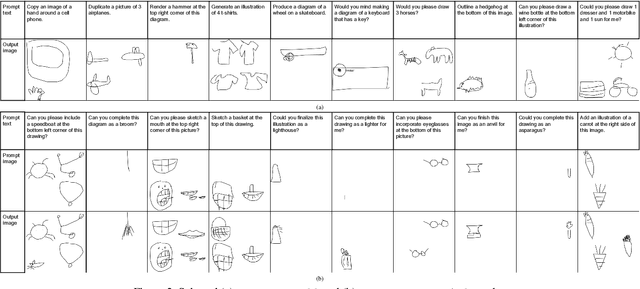
Large language models (LLMs) have made tremendous progress in natural language understanding and they have also been successfully adopted in other domains such as computer vision, robotics, reinforcement learning, etc. In this work, we apply LLMs to image generation tasks by directly generating the virtual brush strokes to paint an image. We present Painter, an LLM that can convert user prompts in text description format to sketches by generating the corresponding brush strokes in an auto-regressive way. We construct Painter based on off-the-shelf LLM that is pre-trained on a large text corpus, by fine-tuning it on the new task while preserving language understanding capabilities. We create a dataset of diverse multi-object sketches paired with textual prompts that covers several object types and tasks. Painter can generate sketches from text descriptions, remove objects from canvas, and detect and classify objects in sketches. Although this is an unprecedented pioneering work in using LLMs for auto-regressive image generation, the results are very encouraging.
Look, Remember and Reason: Visual Reasoning with Grounded Rationales
Jun 30, 2023



Large language models have recently shown human level performance on a variety of reasoning tasks. However, the ability of these models to perform complex visual reasoning has not been studied in detail yet. A key challenge in many visual reasoning tasks is that the visual information needs to be tightly integrated in the reasoning process. We propose to address this challenge by drawing inspiration from human visual problem solving which depends on a variety of low-level visual capabilities. It can often be cast as the three step-process of ``Look, Remember, Reason'': visual information is incrementally extracted using low-level visual routines in a step-by-step fashion until a final answer is reached. We follow the same paradigm to enable existing large language models, with minimal changes to the architecture, to solve visual reasoning problems. To this end, we introduce rationales over the visual input that allow us to integrate low-level visual capabilities, such as object recognition and tracking, as surrogate tasks. We show competitive performance on diverse visual reasoning tasks from the CLEVR, CATER, and ACRE datasets over state-of-the-art models designed specifically for these tasks.
KING: Generating Safety-Critical Driving Scenarios for Robust Imitation via Kinematics Gradients
Apr 28, 2022
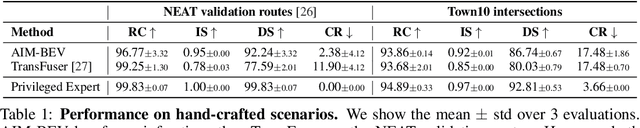
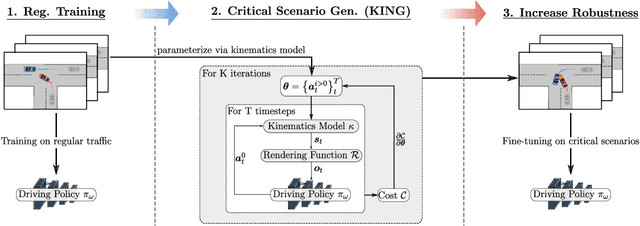
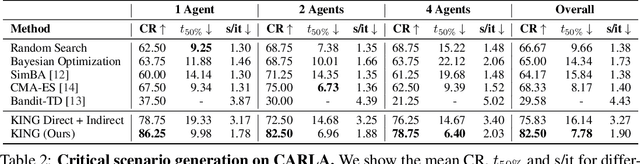
Simulators offer the possibility of safe, low-cost development of self-driving systems. However, current driving simulators exhibit na\"ive behavior models for background traffic. Hand-tuned scenarios are typically added during simulation to induce safety-critical situations. An alternative approach is to adversarially perturb the background traffic trajectories. In this paper, we study this approach to safety-critical driving scenario generation using the CARLA simulator. We use a kinematic bicycle model as a proxy to the simulator's true dynamics and observe that gradients through this proxy model are sufficient for optimizing the background traffic trajectories. Based on this finding, we propose KING, which generates safety-critical driving scenarios with a 20% higher success rate than black-box optimization. By solving the scenarios generated by KING using a privileged rule-based expert algorithm, we obtain training data for an imitation learning policy. After fine-tuning on this new data, we show that the policy becomes better at avoiding collisions. Importantly, our generated data leads to reduced collisions on both held-out scenarios generated via KING as well as traditional hand-crafted scenarios, demonstrating improved robustness.
Euro-PVI: Pedestrian Vehicle Interactions in Dense Urban Centers
Jun 22, 2021
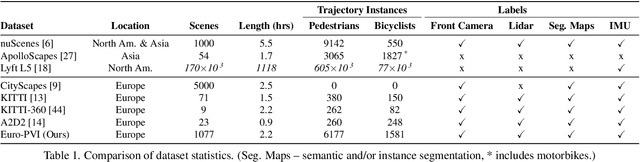

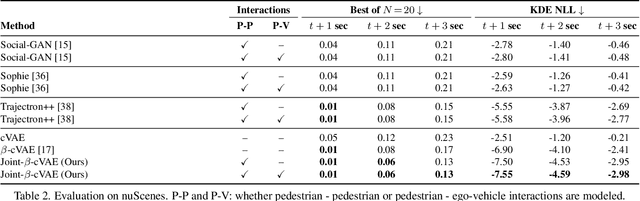
Accurate prediction of pedestrian and bicyclist paths is integral to the development of reliable autonomous vehicles in dense urban environments. The interactions between vehicle and pedestrian or bicyclist have a significant impact on the trajectories of traffic participants e.g. stopping or turning to avoid collisions. Although recent datasets and trajectory prediction approaches have fostered the development of autonomous vehicles yet the amount of vehicle-pedestrian (bicyclist) interactions modeled are sparse. In this work, we propose Euro-PVI, a dataset of pedestrian and bicyclist trajectories. In particular, our dataset caters more diverse and complex interactions in dense urban scenarios compared to the existing datasets. To address the challenges in predicting future trajectories with dense interactions, we develop a joint inference model that learns an expressive multi-modal shared latent space across agents in the urban scene. This enables our Joint-$\beta$-cVAE approach to better model the distribution of future trajectories. We achieve state of the art results on the nuScenes and Euro-PVI datasets demonstrating the importance of capturing interactions between ego-vehicle and pedestrians (bicyclists) for accurate predictions.