 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDLO-Splatting: Tracking Deformable Linear Objects Using 3D Gaussian Splatting
May 13, 2025This work presents DLO-Splatting, an algorithm for estimating the 3D shape of Deformable Linear Objects (DLOs) from multi-view RGB images and gripper state information through prediction-update filtering. The DLO-Splatting algorithm uses a position-based dynamics model with shape smoothness and rigidity dampening corrections to predict the object shape. Optimization with a 3D Gaussian Splatting-based rendering loss iteratively renders and refines the prediction to align it with the visual observations in the update step. Initial experiments demonstrate promising results in a knot tying scenario, which is challenging for existing vision-only methods.
The First WARA Robotics Mobile Manipulation Challenge -- Lessons Learned
May 11, 2025The first WARA Robotics Mobile Manipulation Challenge, held in December 2024 at ABB Corporate Research in V\"aster{\aa}s, Sweden, addressed the automation of task-intensive and repetitive manual labor in laboratory environments - specifically the transport and cleaning of glassware. Designed in collaboration with AstraZeneca, the challenge invited academic teams to develop autonomous robotic systems capable of navigating human-populated lab spaces and performing complex manipulation tasks, such as loading items into industrial dishwashers. This paper presents an overview of the challenge setup, its industrial motivation, and the four distinct approaches proposed by the participating teams. We summarize lessons learned from this edition and propose improvements in design to enable a more effective second iteration to take place in 2025. The initiative bridges an important gap in effective academia-industry collaboration within the domain of autonomous mobile manipulation systems by promoting the development and deployment of applied robotic solutions in real-world laboratory contexts.
FLAME: A Federated Learning Benchmark for Robotic Manipulation
Mar 03, 2025Recent progress in robotic manipulation has been fueled by large-scale datasets collected across diverse environments. Training robotic manipulation policies on these datasets is traditionally performed in a centralized manner, raising concerns regarding scalability, adaptability, and data privacy. While federated learning enables decentralized, privacy-preserving training, its application to robotic manipulation remains largely unexplored. We introduce FLAME (Federated Learning Across Manipulation Environments), the first benchmark designed for federated learning in robotic manipulation. FLAME consists of: (i) a set of large-scale datasets of over 160,000 expert demonstrations of multiple manipulation tasks, collected across a wide range of simulated environments; (ii) a training and evaluation framework for robotic policy learning in a federated setting. We evaluate standard federated learning algorithms in FLAME, showing their potential for distributed policy learning and highlighting key challenges. Our benchmark establishes a foundation for scalable, adaptive, and privacy-aware robotic learning.
Cloth-Splatting: 3D Cloth State Estimation from RGB Supervision
Jan 03, 2025



We introduce Cloth-Splatting, a method for estimating 3D states of cloth from RGB images through a prediction-update framework. Cloth-Splatting leverages an action-conditioned dynamics model for predicting future states and uses 3D Gaussian Splatting to update the predicted states. Our key insight is that coupling a 3D mesh-based representation with Gaussian Splatting allows us to define a differentiable map between the cloth state space and the image space. This enables the use of gradient-based optimization techniques to refine inaccurate state estimates using only RGB supervision. Our experiments demonstrate that Cloth-Splatting not only improves state estimation accuracy over current baselines but also reduces convergence time.
Unfolding the Literature: A Review of Robotic Cloth Manipulation
Jul 01, 2024



The realm of textiles spans clothing, households, healthcare, sports, and industrial applications. The deformable nature of these objects poses unique challenges that prior work on rigid objects cannot fully address. The increasing interest within the community in textile perception and manipulation has led to new methods that aim to address challenges in modeling, perception, and control, resulting in significant progress. However, this progress is often tailored to one specific textile or a subcategory of these textiles. To understand what restricts these methods and hinders current approaches from generalizing to a broader range of real-world textiles, this review provides an overview of the field, focusing specifically on how and to what extent textile variations are addressed in modeling, perception, benchmarking, and manipulation of textiles. We finally conclude by identifying key open problems and outlining grand challenges that will drive future advancements in the field.
AdaFold: Adapting Folding Trajectories of Cloths via Feedback-loop Manipulation
Mar 10, 2024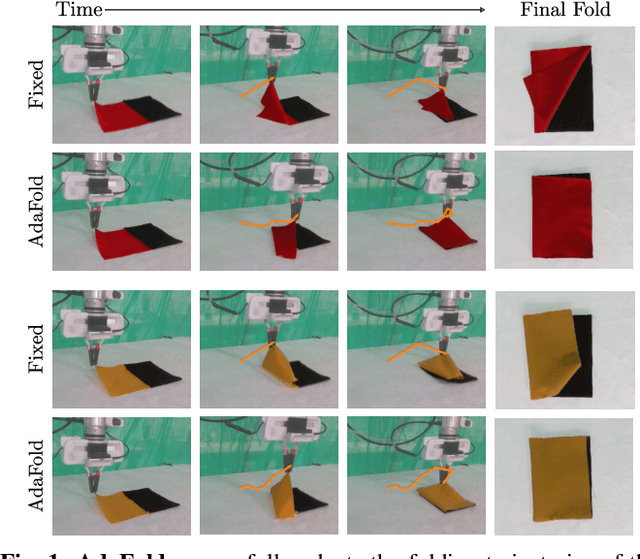
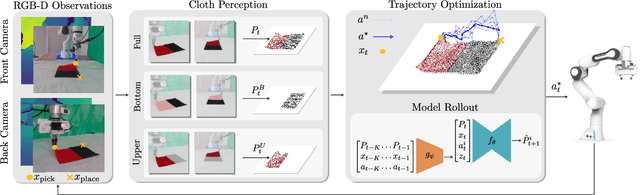
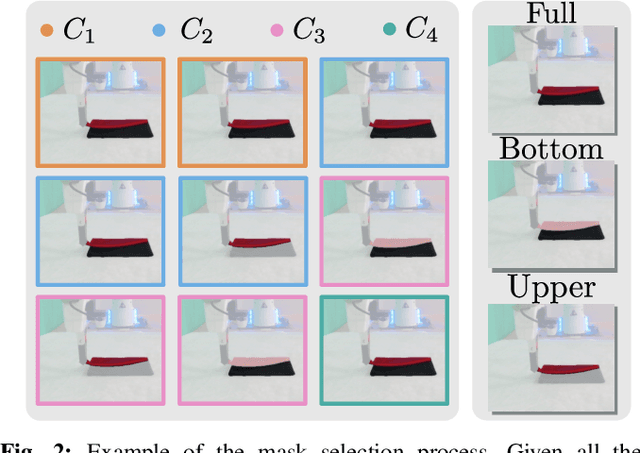
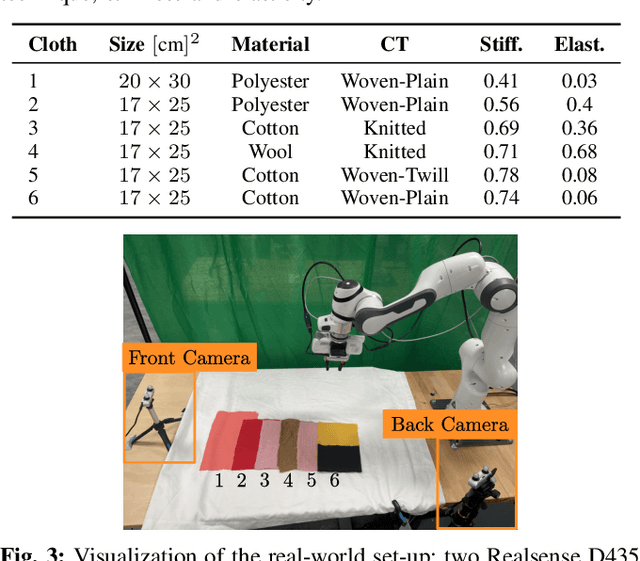
We present AdaFold, a model-based feedback-loop framework for optimizing folding trajectories. AdaFold extracts a particle-based representation of cloth from RGB-D images and feeds back the representation to a model predictive control to re-plan folding trajectory at every time-step. A key component of AdaFold that enables feedback-loop manipulation is the use of semantic descriptors extracted from visual-language models. These descriptors enhance the particle representation of the cloth to distinguish between ambiguous point clouds of differently folded cloths. Our experiments demonstrate AdaFold's ability to adapt folding trajectories to cloths with varying physical properties and generalize from simulated training to real-world execution.
Standardization of Cloth Objects and its Relevance in Robotic Manipulation
Mar 07, 2024The field of robotics faces inherent challenges in manipulating deformable objects, particularly in understanding and standardising fabric properties like elasticity, stiffness, and friction. While the significance of these properties is evident in the realm of cloth manipulation, accurately categorising and comprehending them in real-world applications remains elusive. This study sets out to address two primary objectives: (1) to provide a framework suitable for robotics applications to characterise cloth objects, and (2) to study how these properties influence robotic manipulation tasks. Our preliminary results validate the framework's ability to characterise cloth properties and compare cloth sets, and reveal the influence that different properties have on the outcome of five manipulation primitives. We believe that, in general, results on the manipulation of clothes should be reported along with a better description of the garments used in the evaluation. This paper proposes a set of these measures.
* 2024 ICRA International Conference on Robotics and Automation (ICRA)
EDO-Net: Learning Elastic Properties of Deformable Objects from Graph Dynamics
Sep 19, 2022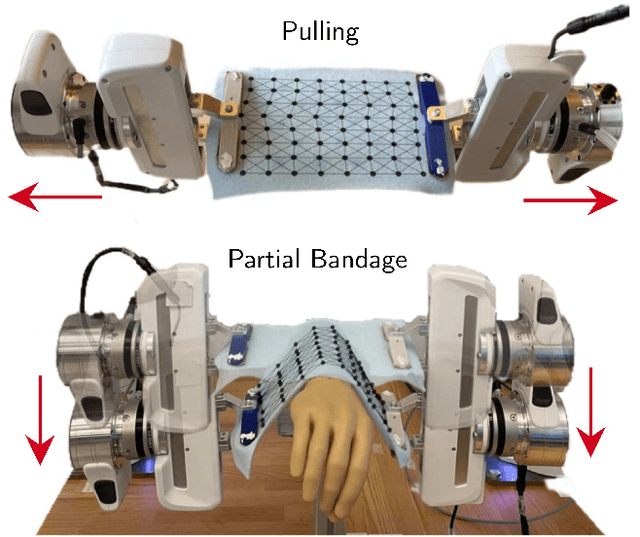
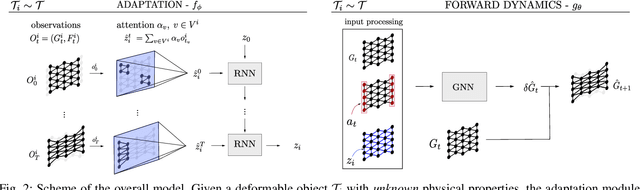
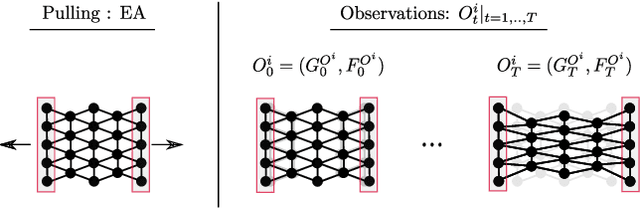
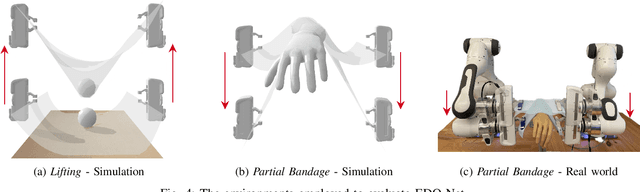
We study the problem of learning graph dynamics of deformable objects which generalize to unknown physical properties. In particular, we leverage a latent representation of elastic physical properties of cloth-like deformable objects which we explore through a pulling interaction. We propose EDO-Net (Elastic Deformable Object - Net), a model trained in a self-supervised fashion on a large variety of samples with different elastic properties. EDO-Net jointly learns an adaptation module, responsible for extracting a latent representation of the physical properties of the object, and a forward-dynamics module, which leverages the latent representation to predict future states of cloth-like objects, represented as graphs. We evaluate EDO-Net both in simulation and real world, assessing its capabilities of: 1) generalizing to unknown physical properties of cloth-like deformable objects, 2) transferring the learned representation to new downstream tasks.
Elastic Context: Encoding Elasticity for Data-driven Models of Textiles
Sep 19, 2022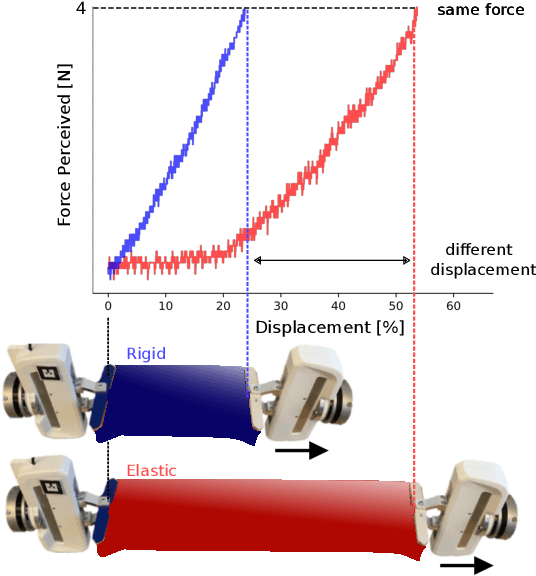
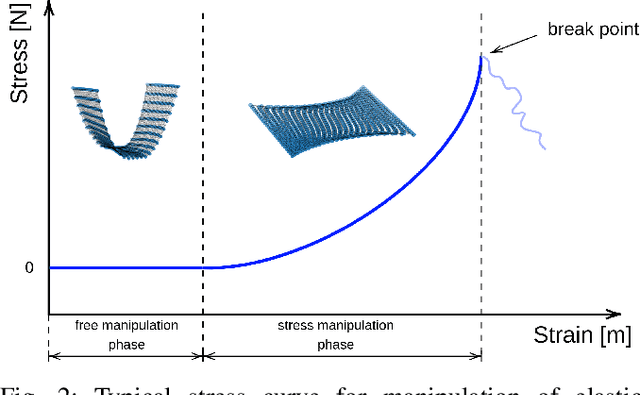
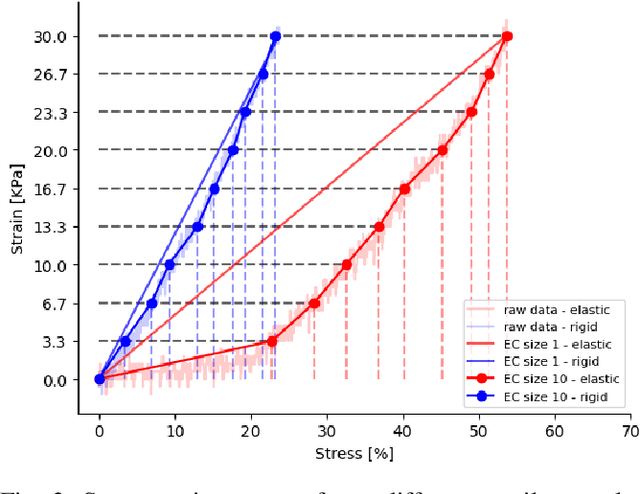
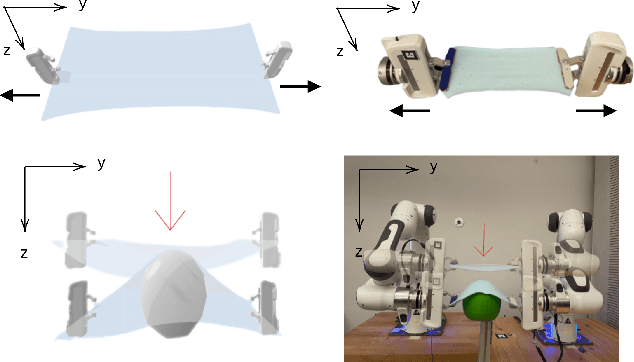
Physical interaction with textiles, such as assistive dressing, relies on advanced dextreous capabilities. The underlying complexity in textile behavior when being pulled and stretched, is due to both the yarn material properties and the textile construction technique. Today, there are no commonly adopted and annotated datasets on which the various interaction or property identification methods are assessed. One important property that affects the interaction is material elasticity that results from both the yarn material and construction technique: these two are intertwined and, if not known a-priori, almost impossible to identify through sensing commonly available on robotic platforms. We introduce Elastic Context (EC), a concept that integrates various properties that affect elastic behavior, to enable a more effective physical interaction with textiles. The definition of EC relies on stress/strain curves commonly used in textile engineering, which we reformulated for robotic applications. We employ EC using Graph Neural Network (GNN) to learn generalized elastic behaviors of textiles. Furthermore, we explore the effect the dimension of the EC has on accurate force modeling of non-linear real-world elastic behaviors, highlighting the challenges of current robotic setups to sense textile properties.
Textile Taxonomy and Classification Using Pulling and Twisting
Mar 17, 2021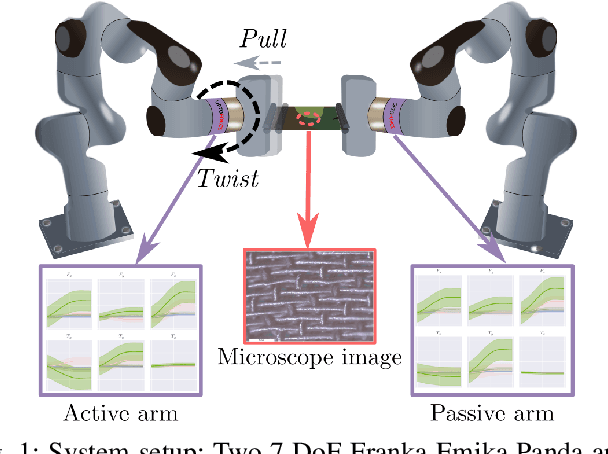
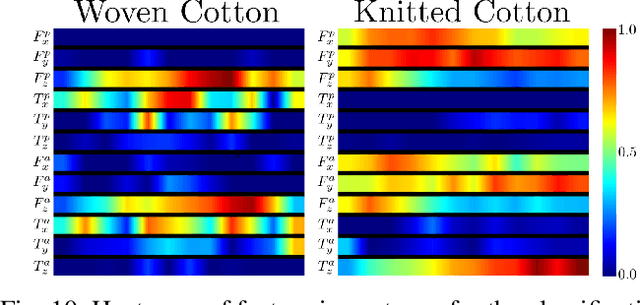
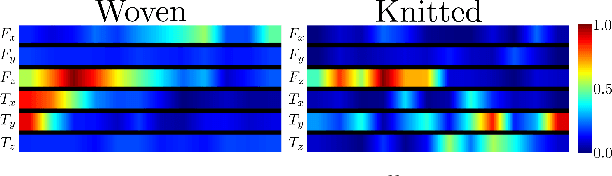

Identification of textile properties is an important milestone toward advanced robotic manipulation tasks that consider interaction with clothing items such as assisted dressing, laundry folding, automated sewing, textile recycling and reusing. Despite the abundance of work considering this class of deformable objects, many open problems remain. These relate to the choice and modelling of the sensory feedback as well as the control and planning of the interaction and manipulation strategies. Most importantly, there is no structured approach for studying and assessing different approaches that may bridge the gap between the robotics community and textile production industry. To this end, we outline a textile taxonomy considering fiber types and production methods, commonly used in textile industry. We devise datasets according to the taxonomy, and study how robotic actions, such as pulling and twisting of the textile samples, can be used for the classification. We also provide important insights from the perspective of visualization and interpretability of the gathered data.