 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeT-DOM: A Taxonomy for Robotic Manipulation of Deformable Objects
Dec 30, 2024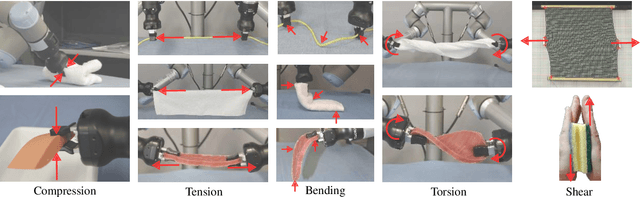
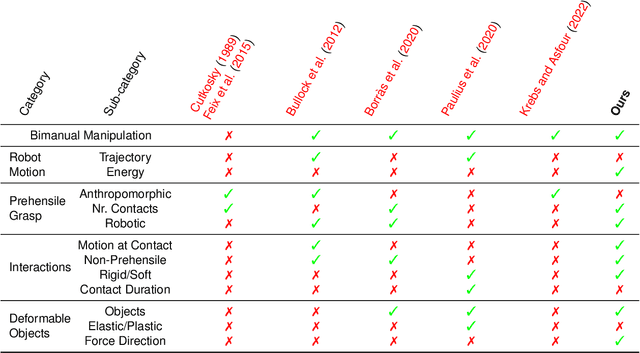
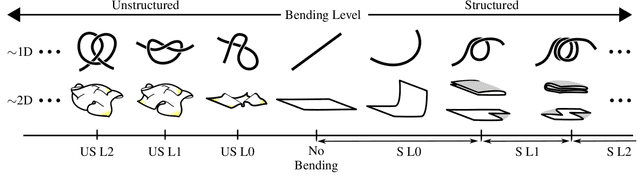
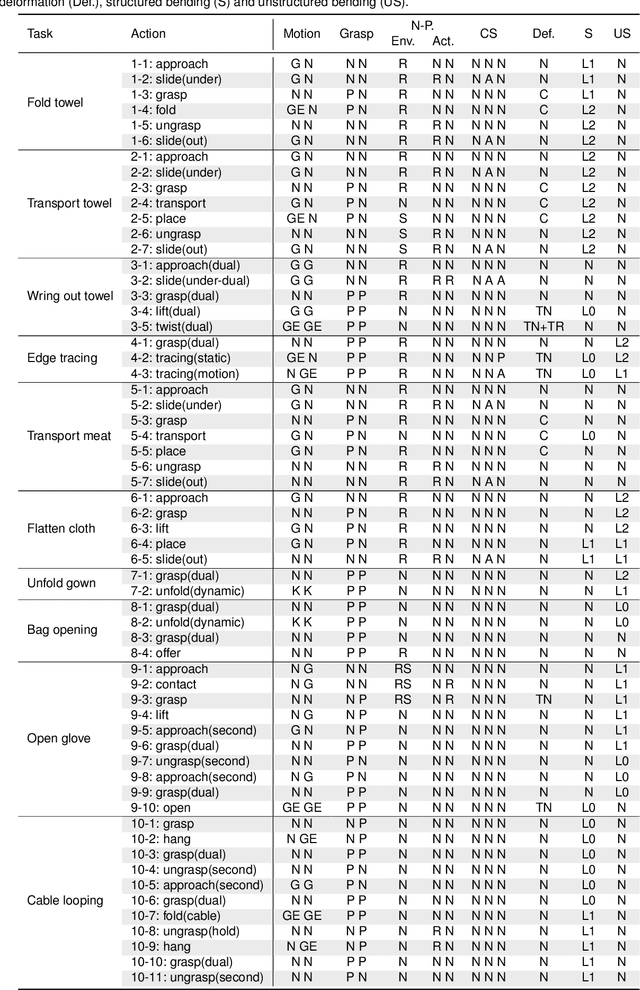
Robotic grasp and manipulation taxonomies, inspired by observing human manipulation strategies, can provide key guidance for tasks ranging from robotic gripper design to the development of manipulation algorithms. The existing grasp and manipulation taxonomies, however, often assume object rigidity, which limits their ability to reason about the complex interactions in the robotic manipulation of deformable objects. Hence, to assist in tasks involving deformable objects, taxonomies need to capture more comprehensively the interactions inherent in deformable object manipulation. To this end, we introduce T-DOM, a taxonomy that analyses key aspects involved in the manipulation of deformable objects, such as robot motion, forces, prehensile and non-prehensile interactions and, for the first time, a detailed classification of object deformations. To evaluate T-DOM, we curate a dataset of ten tasks involving a variety of deformable objects, such as garments, ropes, and surgical gloves, as well as diverse types of deformations. We analyse the proposed tasks comparing the T-DOM taxonomy with previous well established manipulation taxonomies. Our analysis demonstrates that T-DOM can effectively distinguish between manipulation skills that were not identified in other taxonomies, across different deformable objects and manipulation actions, offering new categories to characterize a skill. The proposed taxonomy significantly extends past work, providing a more fine-grained classification that can be used to describe the robotic manipulation of deformable objects. This work establishes a foundation for advancing deformable object manipulation, bridging theoretical understanding and practical implementation in robotic systems.
Unfolding the Literature: A Review of Robotic Cloth Manipulation
Jul 01, 2024



The realm of textiles spans clothing, households, healthcare, sports, and industrial applications. The deformable nature of these objects poses unique challenges that prior work on rigid objects cannot fully address. The increasing interest within the community in textile perception and manipulation has led to new methods that aim to address challenges in modeling, perception, and control, resulting in significant progress. However, this progress is often tailored to one specific textile or a subcategory of these textiles. To understand what restricts these methods and hinders current approaches from generalizing to a broader range of real-world textiles, this review provides an overview of the field, focusing specifically on how and to what extent textile variations are addressed in modeling, perception, benchmarking, and manipulation of textiles. We finally conclude by identifying key open problems and outlining grand challenges that will drive future advancements in the field.
Dynamic Manipulation of Deformable Objects using Imitation Learning with Adaptation to Hardware Constraints
Mar 19, 2024Imitation Learning (IL) is a promising paradigm for learning dynamic manipulation of deformable objects since it does not depend on difficult-to-create accurate simulations of such objects. However, the translation of motions demonstrated by a human to a robot is a challenge for IL, due to differences in the embodiments and the robot's physical limits. These limits are especially relevant in dynamic manipulation where high velocities and accelerations are typical. To address this problem, we propose a framework that first maps a dynamic demonstration into a motion that respects the robot's constraints using a constrained Dynamic Movement Primitive. Second, the resulting object state is further optimized by quasi-static refinement motions to optimize task performance metrics. This allows both efficiently altering the object state by dynamic motions and stable small-scale refinements. We evaluate the framework in the challenging task of bag opening, designing the system BILBO: Bimanual dynamic manipulation using Imitation Learning for Bag Opening. Our results show that BILBO can successfully open a wide range of crumpled bags, using a demonstration with a single bag. See supplementary material at https://sites.google.com/view/bilbo-bag.
Benchmarking the Sim-to-Real Gap in Cloth Manipulation
Oct 14, 2023Realistic physics engines play a crucial role for learning to manipulate deformable objects such as garments in simulation. By doing so, researchers can circumvent challenges such as sensing the deformation of the object in the real-world. In spite of the extensive use of simulations for this task, few works have evaluated the reality gap between deformable object simulators and real-world data. We present a benchmark dataset to evaluate the sim-to-real gap in cloth manipulation. The dataset is collected by performing a dynamic cloth manipulation task involving contact with a rigid table. We use the dataset to evaluate the reality gap, computational time, and simulation stability of four popular deformable object simulators: MuJoCo, Bullet, Flex, and SOFA. Additionally, we discuss the benefits and drawbacks of each simulator. The benchmark dataset is open-source. Supplementary material, videos, and code, can be found at https://sites.google.com/view/cloth-sim2real-benchmark.
QDP: Learning to Sequentially Optimise Quasi-Static and Dynamic Manipulation Primitives for Robotic Cloth Manipulation
Mar 23, 2023Pre-defined manipulation primitives are widely used for cloth manipulation. However, cloth properties such as its stiffness or density can highly impact the performance of these primitives. Although existing solutions have tackled the parameterisation of pick and place locations, the effect of factors such as the velocity or trajectory of quasi-static and dynamic manipulation primitives has been neglected. Choosing appropriate values for these parameters is crucial to cope with the range of materials present in house-hold cloth objects. To address this challenge, we introduce the Quasi-Dynamic Parameterisable (QDP) method, which optimises parameters such as the motion velocity in addition to the pick and place positions of quasi-static and dynamic manipulation primitives. In this work, we leverage the framework of Sequential Reinforcement Learning to decouple sequentially the parameters that compose the primitives. To evaluate the effectiveness of the method we focus on the task of cloth unfolding with a robotic arm in simulation and real-world experiments. Our results in simulation show that by deciding the optimal parameters for the primitives the performance can improve by 20% compared to sub-optimal ones. Real-world results demonstrate the advantage of modifying the velocity and height of manipulation primitives for cloths with different mass, stiffness, shape and size. Supplementary material, videos, and code, can be found at https://sites.google.com/view/qdp-srl.
Co-Imitation: Learning Design and Behaviour by Imitation
Sep 02, 2022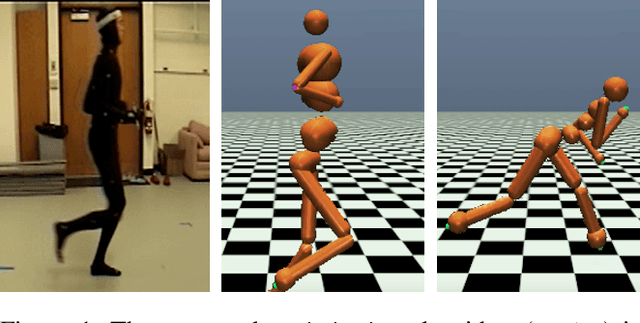
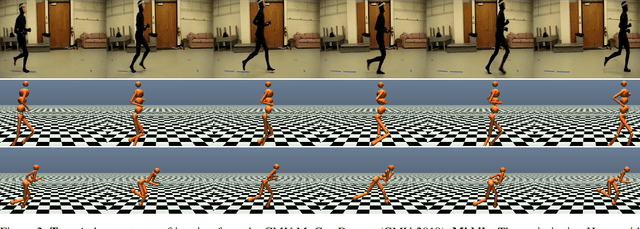
The co-adaptation of robots has been a long-standing research endeavour with the goal of adapting both body and behaviour of a system for a given task, inspired by the natural evolution of animals. Co-adaptation has the potential to eliminate costly manual hardware engineering as well as improve the performance of systems. The standard approach to co-adaptation is to use a reward function for optimizing behaviour and morphology. However, defining and constructing such reward functions is notoriously difficult and often a significant engineering effort. This paper introduces a new viewpoint on the co-adaptation problem, which we call co-imitation: finding a morphology and a policy that allow an imitator to closely match the behaviour of a demonstrator. To this end we propose a co-imitation methodology for adapting behaviour and morphology by matching state distributions of the demonstrator. Specifically, we focus on the challenging scenario with mismatched state- and action-spaces between both agents. We find that co-imitation increases behaviour similarity across a variety of tasks and settings, and demonstrate co-imitation by transferring human walking, jogging and kicking skills onto a simulated humanoid.
Manipulation of granular materials by learning particle interactions
Nov 03, 2021
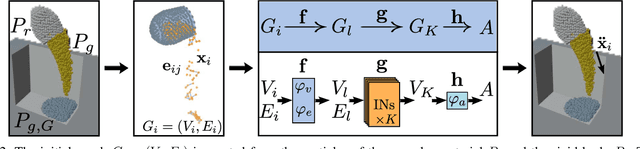

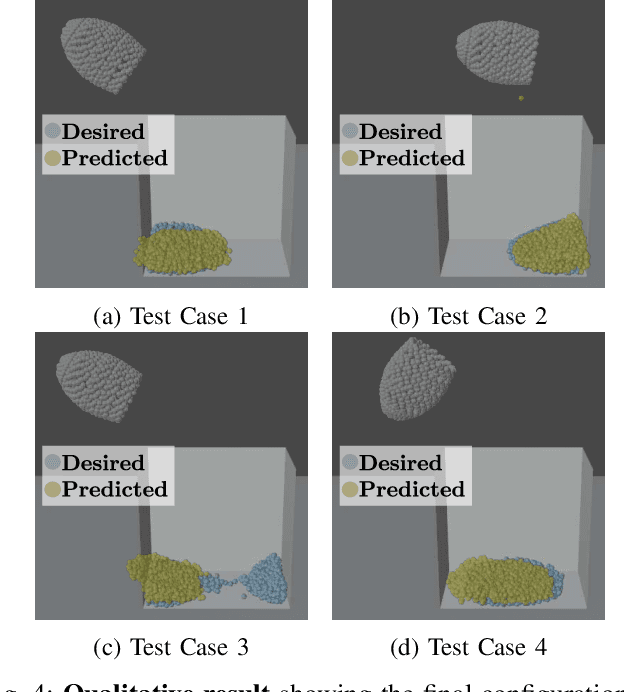
Manipulation of granular materials such as sand or rice remains an unsolved challenge due to the difficulty of modeling material particles interacting with each other. Current approaches tend to simplify the material dynamics and omit the interactions between the particles. In this paper, we propose to use a graph-based representation to model the interaction dynamics of the material and rigid bodies manipulating it. This allows the planning of manipulation trajectories to reach a desired configuration of the material. We use a graph neural network (GNN) to model the particle interactions via message-passing. To plan manipulation trajectories, we propose to minimise the Wasserstein distance between the distribution of granular particles and the desired configuration. We demonstrate that the proposed method is able to pour granular materials into the desired configuration both in simulated and real scenarios.
Closing the Sim2Real Gap in Dynamic Cloth Manipulation
Sep 10, 2021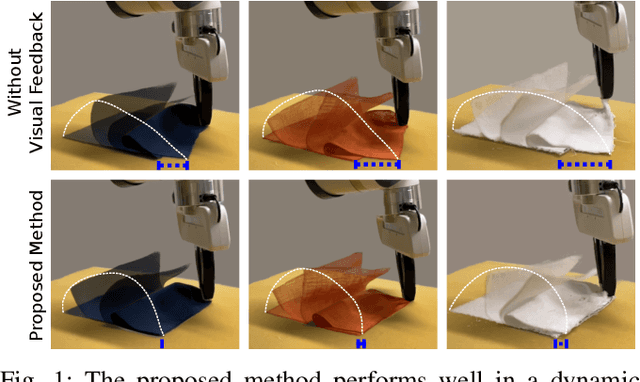
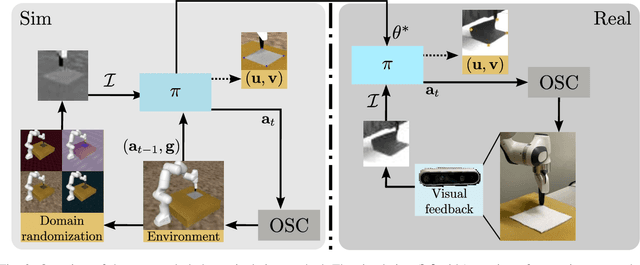
Cloth manipulation is a challenging task due to the many degrees of freedom and properties of the material affecting the dynamics of the cloth. The nonlinear dynamics of the cloth have particularly strong significance in dynamic cloth manipulation, where some parts of the cloth are not directly controllable. In this paper, we present a novel approach for solving dynamic cloth manipulation by training policies using reinforcement learning (RL) in simulation and transferring the learned policies to the real world in a zero-shot manner. The proposed method uses visual feedback and material property randomization in a physics simulator to achieve generalization in the real world. Experimental results show that using only visual feedback is enough for the policies to learn the dynamic manipulation task in a way that transfers from simulation to the real world. In addition, the randomization of the dynamics in simulation enables capturing the behavior of a variety of cloths in the real world.
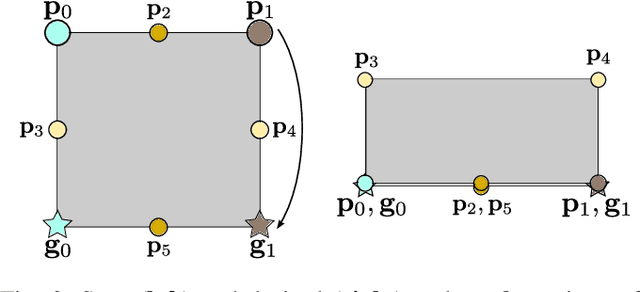
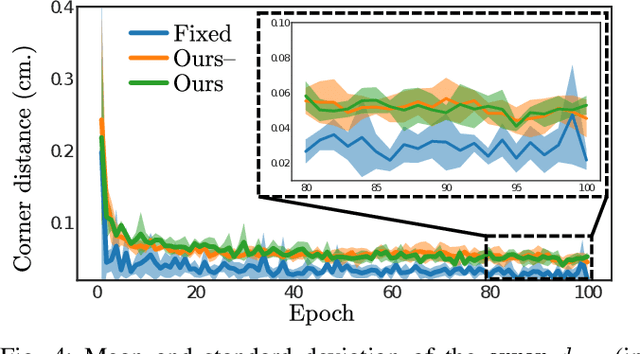
Evolving-Graph Gaussian Processes
Jun 29, 2021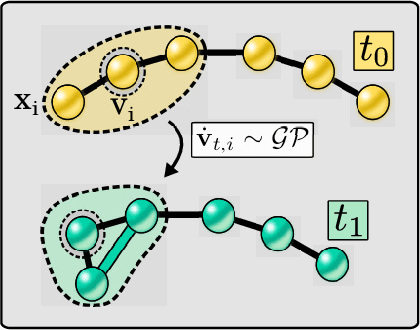
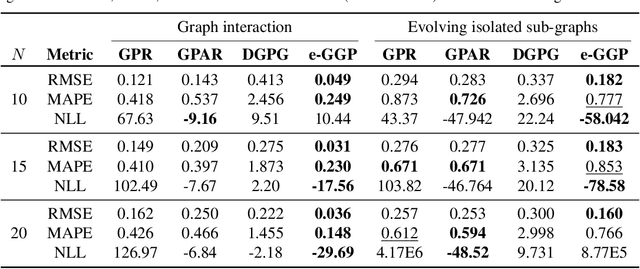
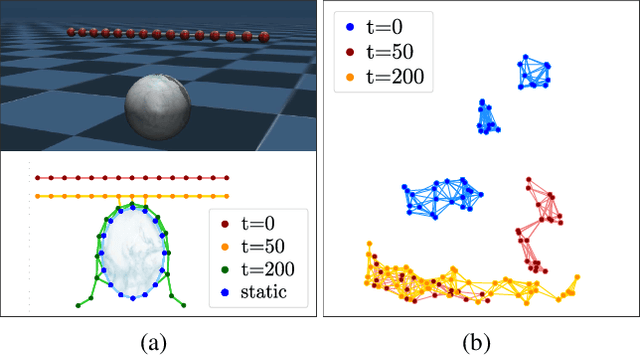
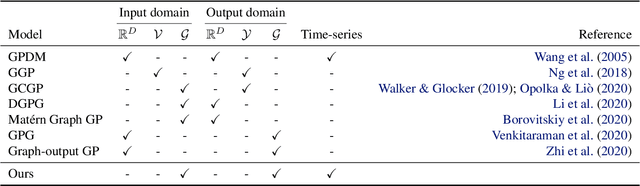
Graph Gaussian Processes (GGPs) provide a data-efficient solution on graph structured domains. Existing approaches have focused on static structures, whereas many real graph data represent a dynamic structure, limiting the applications of GGPs. To overcome this we propose evolving-Graph Gaussian Processes (e-GGPs). The proposed method is capable of learning the transition function of graph vertices over time with a neighbourhood kernel to model the connectivity and interaction changes between vertices. We assess the performance of our method on time-series regression problems where graphs evolve over time. We demonstrate the benefits of e-GGPs over static graph Gaussian Process approaches.