 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeManipulation of granular materials by learning particle interactions
Paper and Code
Nov 03, 2021
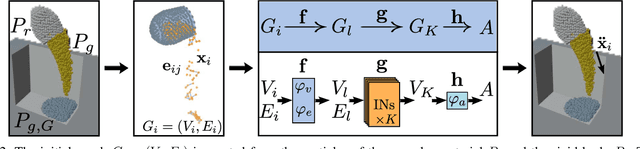

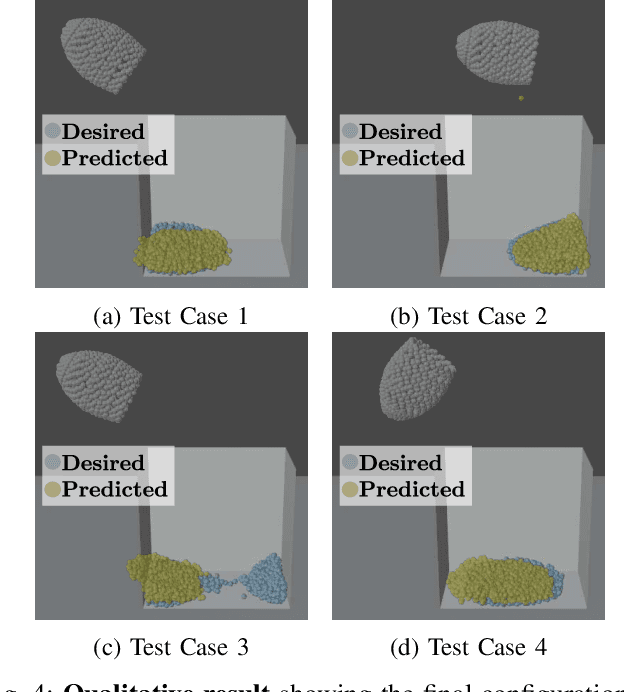
Manipulation of granular materials such as sand or rice remains an unsolved challenge due to the difficulty of modeling material particles interacting with each other. Current approaches tend to simplify the material dynamics and omit the interactions between the particles. In this paper, we propose to use a graph-based representation to model the interaction dynamics of the material and rigid bodies manipulating it. This allows the planning of manipulation trajectories to reach a desired configuration of the material. We use a graph neural network (GNN) to model the particle interactions via message-passing. To plan manipulation trajectories, we propose to minimise the Wasserstein distance between the distribution of granular particles and the desired configuration. We demonstrate that the proposed method is able to pour granular materials into the desired configuration both in simulated and real scenarios.