 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinetuning Vision-Language-Action Models Requires Fewer Layers Than You Think
Jun 18, 2026Vision-Language-Action (VLA) models pre-trained on massive video-robot datasets have revolutionized robotic manipulation, yet their multi-billion parameter architectures impose prohibitive computational burdens during downstream fine-tuning and real-time inference. In this work, we reveal a highly non-trivial architectural characteristic of these continuous control foundation policies (e.g., pi_0, GR00T-N1.5): despite being trained on diverse physical trajectories, they exhibit severe layer-wise representational redundancy. To exploit this, we introduce a structural compression pipeline that is entirely training-free, bypassing the need of existing methods to load full-scale models to learn optimized token reductions or dynamic layer selectors. Instead, using only a single forward pass via Centered Kernel Alignment to identify redundant layer features, we remove twin layers to permanently compress the model depth by up to 50% across both the VLM backbone and the continuous control policy head. Downstream fine-tuning of this streamlined architecture yields a dual acceleration benefit: a 40-50% reduction in training time and up to 30% faster real-time inference, while matching or exceeding full-scale base model performance. We comprehensively validate our method across three simulation benchmarks (LIBERO, RoboCasa, SimplerEnv) and 10 diverse real-world manipulation tasks across 4 unique robotic embodiments. These results prove that advanced VLAs require significantly fewer layers than previously assumed, offering a highly compute-efficient paradigm for scalable robot learning.
Adversarial Sensor Errors for Safe and Robust Wind Turbine Fleet Control
Apr 09, 2026Plant-level control is an emerging wind energy technology that presents opportunities and challenges. By controlling turbines in a coordinated manner via a central controller, it is possible to achieve greater wind power plant efficiency. However, there is a risk that measurement errors will confound the process, or even that hackers will alter the telemetry signals received by the central controller. This paper presents a framework for developing a safe plant controller by training it with an adversarial agent designed to confound it. This necessitates training the adversary to confound the controller, creating a sort of circular logic or "Arms Race." This paper examines three broad training approaches for co-training the protagonist and adversary, finding that an Arms Race approach yields the best results. These initial results indicate that the Arms Race adversarial training reduced worst-case performance degradation from 39% power loss to 7.9% power gain relative to a baseline operational strategy.
Interactive Identification of Granular Materials using Force Measurements
Mar 26, 2024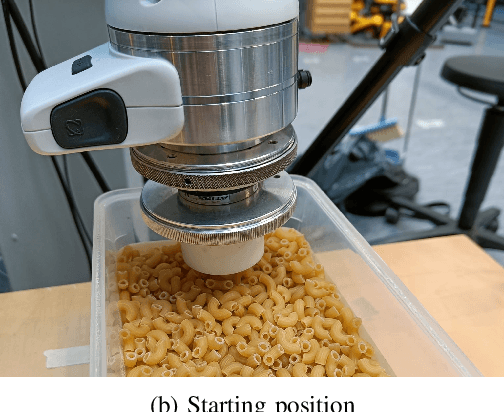



The ability to identify granular materials facilitates the emergence of various new applications in robotics, ranging from cooking at home to truck loading at mining sites. However, granular material identification remains a challenging and underexplored area. In this work, we present a novel interactive material identification framework that enables robots to identify a wide range of granular materials using only a force-torque sensor for perception. Our framework, comprising interactive exploration, feature extraction, and classification stages, prioritizes simplicity and transparency for seamless integration into various manipulation pipelines. We evaluate the proposed approach through extensive experiments with a real-world dataset comprising 11 granular materials, which we also make publicly available. Additionally, we conducted a comprehensive qualitative analysis of the dataset to offer deeper insights into its nature, aiding future development. Our results show that the proposed method is capable of accurately identifying a wide range of granular materials solely relying on force measurements obtained from direct interaction with the materials. Code and dataset are available at: https://irobotics.aalto.fi/indentify_granular/.
Dynamic Manipulation of Deformable Objects using Imitation Learning with Adaptation to Hardware Constraints
Mar 19, 2024Imitation Learning (IL) is a promising paradigm for learning dynamic manipulation of deformable objects since it does not depend on difficult-to-create accurate simulations of such objects. However, the translation of motions demonstrated by a human to a robot is a challenge for IL, due to differences in the embodiments and the robot's physical limits. These limits are especially relevant in dynamic manipulation where high velocities and accelerations are typical. To address this problem, we propose a framework that first maps a dynamic demonstration into a motion that respects the robot's constraints using a constrained Dynamic Movement Primitive. Second, the resulting object state is further optimized by quasi-static refinement motions to optimize task performance metrics. This allows both efficiently altering the object state by dynamic motions and stable small-scale refinements. We evaluate the framework in the challenging task of bag opening, designing the system BILBO: Bimanual dynamic manipulation using Imitation Learning for Bag Opening. Our results show that BILBO can successfully open a wide range of crumpled bags, using a demonstration with a single bag. See supplementary material at https://sites.google.com/view/bilbo-bag.
Online Learning of Human Constraints from Feedback in Shared Autonomy
Mar 05, 2024Real-time collaboration with humans poses challenges due to the different behavior patterns of humans resulting from diverse physical constraints. Existing works typically focus on learning safety constraints for collaboration, or how to divide and distribute the subtasks between the participating agents to carry out the main task. In contrast, we propose to learn a human constraints model that, in addition, considers the diverse behaviors of different human operators. We consider a type of collaboration in a shared-autonomy fashion, where both a human operator and an assistive robot act simultaneously in the same task space that affects each other's actions. The task of the assistive agent is to augment the skill of humans to perform a shared task by supporting humans as much as possible, both in terms of reducing the workload and minimizing the discomfort for the human operator. Therefore, we propose an augmentative assistant agent capable of learning and adapting to human physical constraints, aligning its actions with the ergonomic preferences and limitations of the human operator.
SPONGE: Sequence Planning with Deformable-ON-Rigid Contact Prediction from Geometric Features
Mar 24, 2023Planning robotic manipulation tasks, especially those that involve interaction between deformable and rigid objects, is challenging due to the complexity in predicting such interactions. We introduce SPONGE, a sequence planning pipeline powered by a deep learning-based contact prediction model for contacts between deformable and rigid bodies under interactions. The contact prediction model is trained on synthetic data generated by a developed simulation environment to learn the mapping from point-cloud observation of a rigid target object and the pose of a deformable tool, to 3D representation of the contact points between the two bodies. We experimentally evaluated the proposed approach for a dish cleaning task both in simulation and on a real \panda with real-world objects. The experimental results demonstrate that in both scenarios the proposed planning pipeline is capable of generating high-quality trajectories that can accomplish the task by achieving more than 90\% area coverage on different objects of varying sizes and curvatures while minimizing travel distance. Code and video are available at: \url{https://irobotics.aalto.fi/sponge/}.
Constrained Generative Sampling of 6-DoF Grasps
Feb 21, 2023



Most state-of-the-art data-driven grasp sampling methods propose stable and collision-free grasps uniformly on the target object. For bin-picking, executing any of those grasps is sufficient. However, for completing specific tasks, such as squeezing out liquid from a bottle, we want the grasp to be on a specific part on the object body while avoiding other locations, such as the cap. In this work, we present a generative grasp sampling network, VCGS, capable of constrained 6-Degrees-of-Freedom (DoF) grasp sampling. In addition, we also curate a new dataset designed to train and evaluate methods for constrained grasping. The new dataset, called CONG, consists of over 14 million training samples of synthetically rendered point clouds and grasps at random target areas on 2889 objects. VCGS is benchmarked against GraspNet, a state-of-the-art unconstrained grasp sampler, in simulation and on a real robot. The results demonstrate that VCGS achieves a 10-15% higher grasp success rate than the baseline while being 2-3 times as sample efficient.
A Novel Simulation-Based Quality Metric for Evaluating Grasps on 3D Deformable Objects
Mar 23, 2022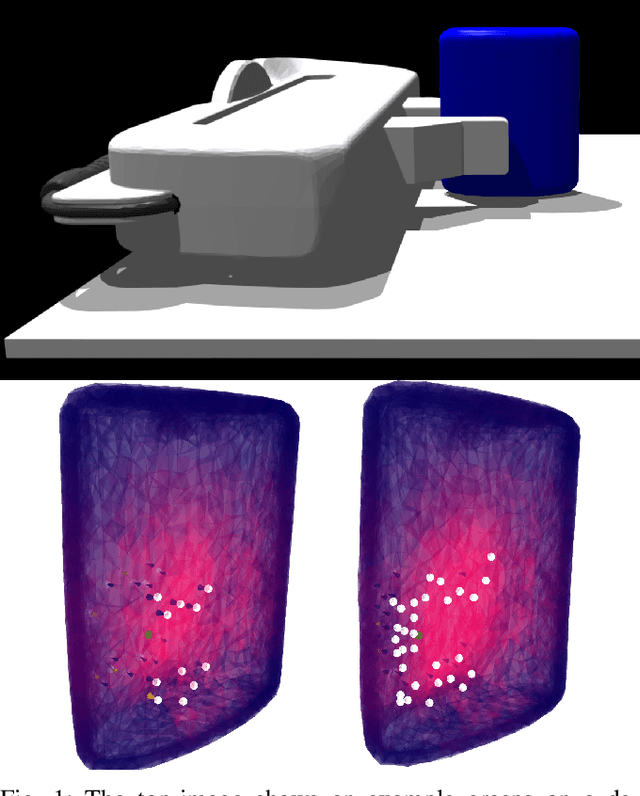
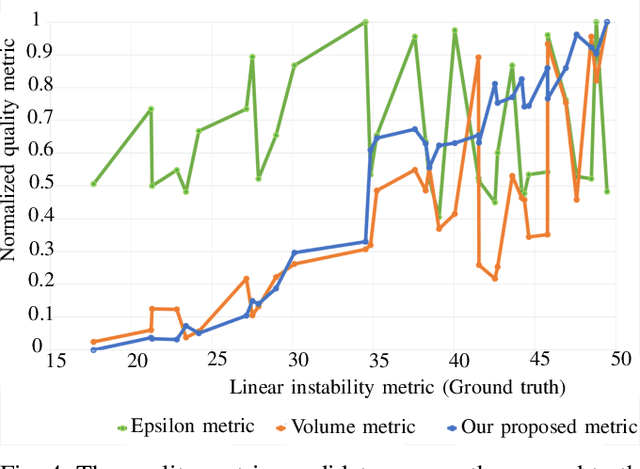
Evaluation of grasps on deformable 3D objects is a little-studied problem, even if the applicability of rigid object grasp quality measures for deformable ones is an open question. A central issue with most quality measures is their dependence on contact points which for deformable objects depend on the deformations. This paper proposes a grasp quality measure for deformable objects that uses information about object deformation to calculate the grasp quality. Grasps are evaluated by simulating the deformations during grasping and predicting the contacts between the gripper and the grasped object. The contact information is then used as input for a new grasp quality metric to quantify the grasp quality. The approach is benchmarked against two classical rigid-body quality metrics on over 600 grasps in the Isaac gym simulation and over 50 real-world grasps. Experimental results show an average improvement of 18\% in the grasp success rate for deformable objects compared to the classical rigid-body quality metrics.
Deformation-Aware Data-Driven Grasp Synthesis
Sep 11, 2021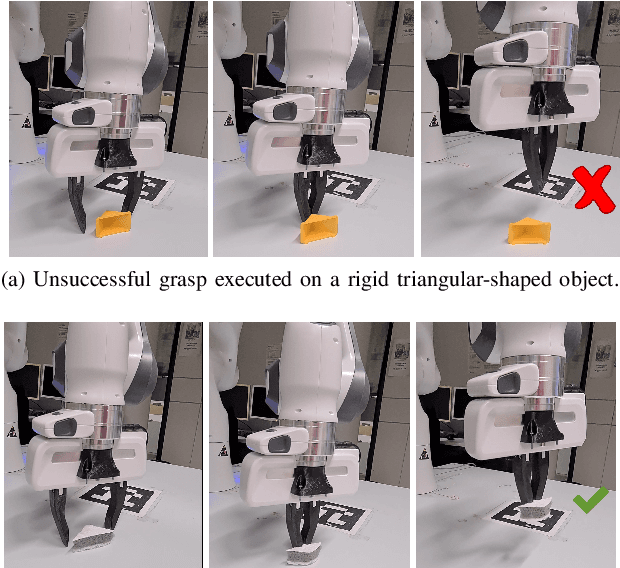
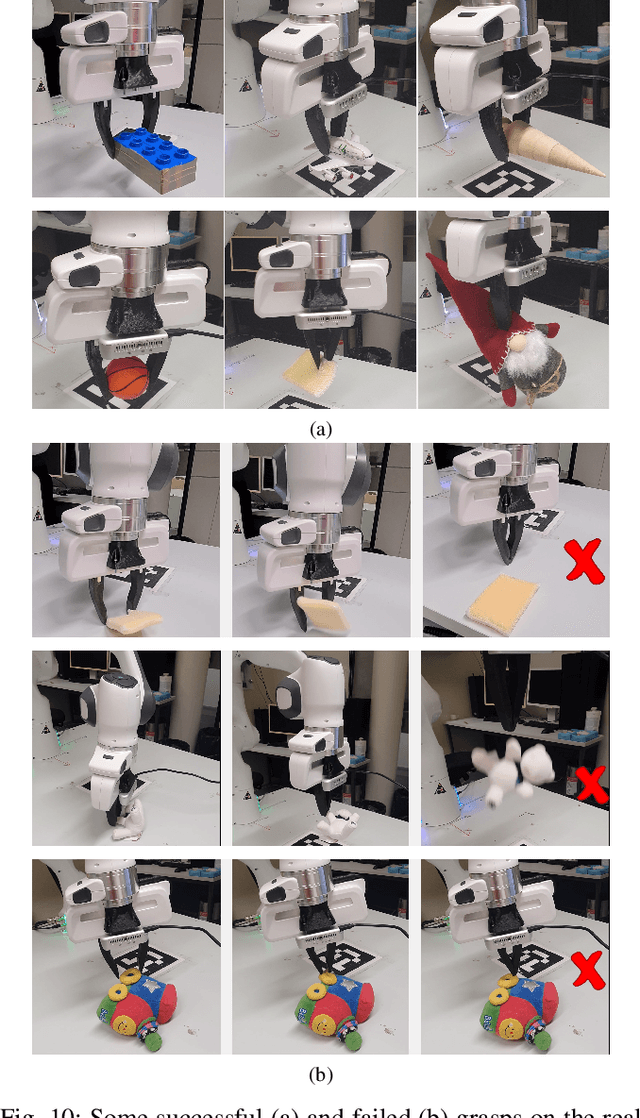
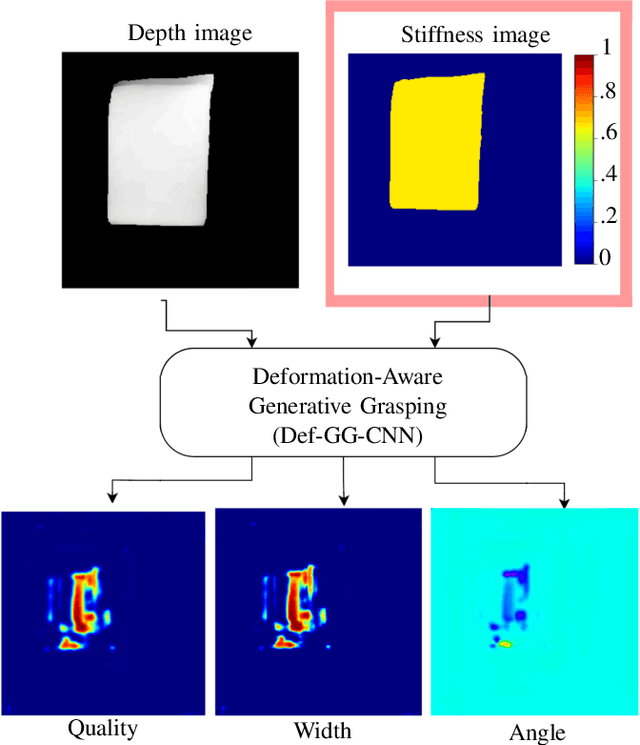
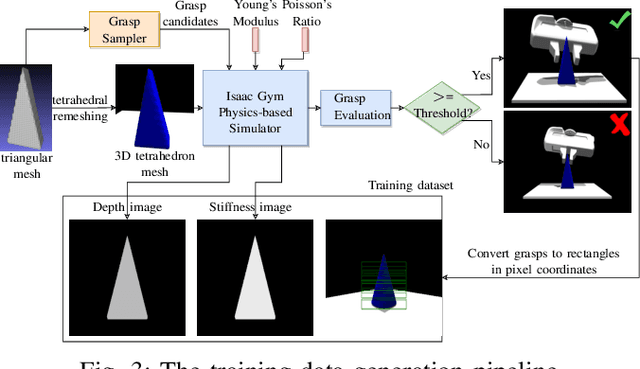
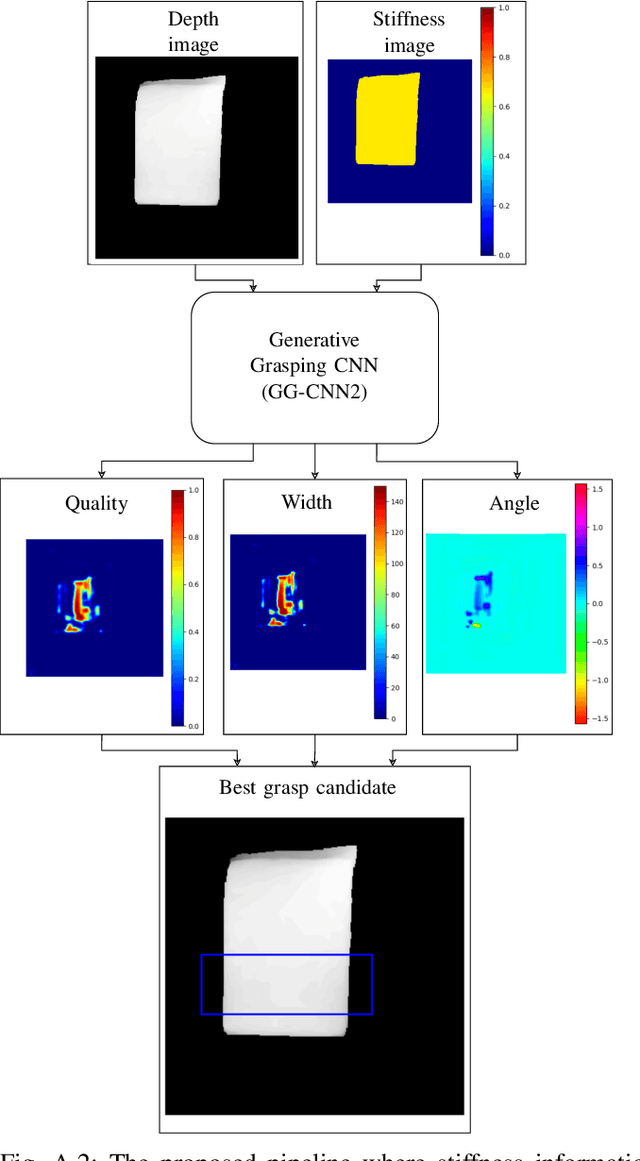
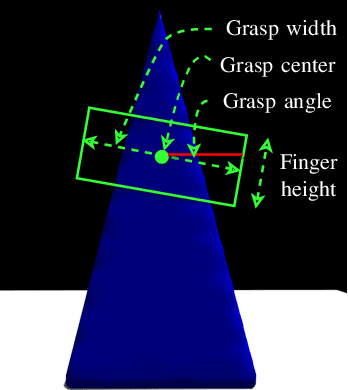
Grasp synthesis for 3D deformable objects remains a little-explored topic, most works aiming to minimize deformations. However, deformations are not necessarily harmful -- humans are, for example, able to exploit deformations to generate new potential grasps. How to achieve that on a robot is though an open question. This paper proposes an approach that uses object stiffness information in addition to depth images for synthesizing high-quality grasps. We achieve this by incorporating object stiffness as an additional input to a state-of-the-art deep grasp planning network. We also curate a new synthetic dataset of grasps on objects of varying stiffness using the Isaac Gym simulator for training the network. We experimentally validate and compare our proposed approach against the case where we do not incorporate object stiffness on a total of 2800 grasps in simulation and 420 grasps on a real Franka Emika Panda. The experimental results show significant improvement in grasp success rate using the proposed approach on a wide range of objects with varying shapes, sizes, and stiffness. Furthermore, we demonstrate that the approach can generate different grasping strategies for different stiffness values, such as pinching for soft objects and caging for hard objects. Together, the results clearly show the value of incorporating stiffness information when grasping objects of varying stiffness.
Towards synthesizing grasps for 3D deformable objects with physics-based simulation
Jul 19, 2021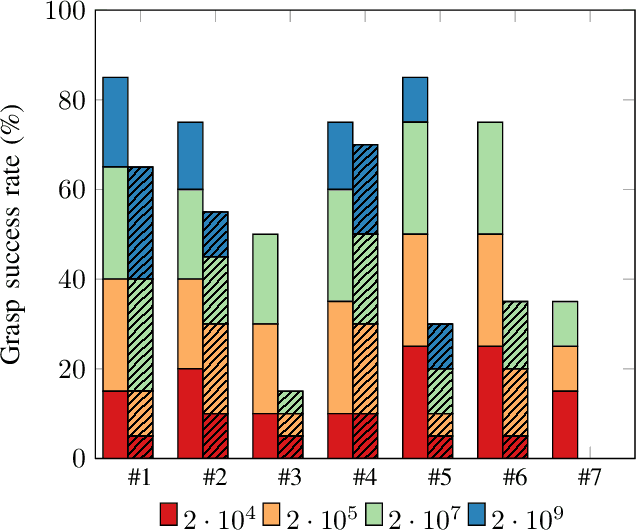
Grasping deformable objects is not well researched due to the complexity in modelling and simulating the dynamic behavior of such objects. However, with the rapid development of physics-based simulators that support soft bodies, the research gap between rigid and deformable objects is getting smaller. To leverage the capability of such simulators and to challenge the assumption that has guided robotic grasping research so far, i.e., object rigidity, we proposed a deep-learning based approach that generates stiffness-dependent grasps. Our network is trained on purely synthetic data generated from a physics-based simulator. The same simulator is also used to evaluate the trained network. The results show improvement in terms of grasp ranking and grasp success rate. Furthermore, our network can adapt the grasps based on the stiffness. We are currently validating the proposed approach on a larger test dataset in simulation and on a physical robot.