 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInstant 3D Human Avatar Generation using Image Diffusion Models
Jun 11, 2024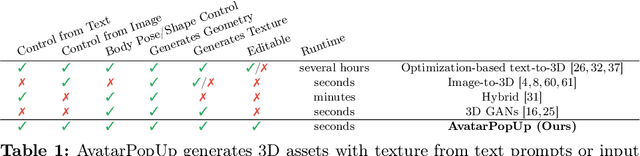
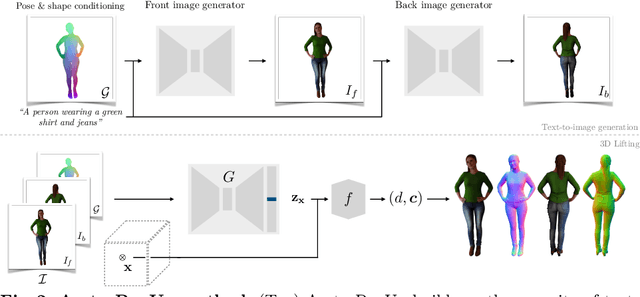
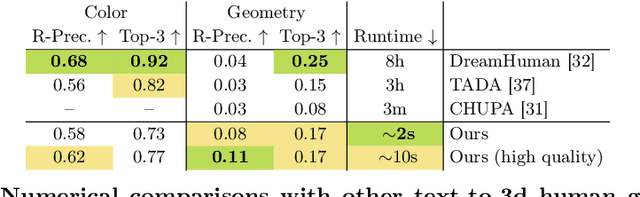
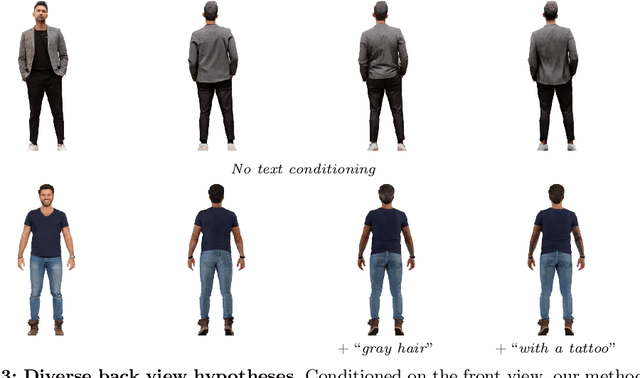
We present AvatarPopUp, a method for fast, high quality 3D human avatar generation from different input modalities, such as images and text prompts and with control over the generated pose and shape. The common theme is the use of diffusion-based image generation networks that are specialized for each particular task, followed by a 3D lifting network. We purposefully decouple the generation from the 3D modeling which allow us to leverage powerful image synthesis priors, trained on billions of text-image pairs. We fine-tune latent diffusion networks with additional image conditioning to solve tasks such as image generation and back-view prediction, and to support qualitatively different multiple 3D hypotheses. Our partial fine-tuning approach allows to adapt the networks for each task without inducing catastrophic forgetting. In our experiments, we demonstrate that our method produces accurate, high-quality 3D avatars with diverse appearance that respect the multimodal text, image, and body control signals. Our approach can produce a 3D model in as few as 2 seconds, a four orders of magnitude speedup w.r.t. the vast majority of existing methods, most of which solve only a subset of our tasks, and with fewer controls, thus enabling applications that require the controlled 3D generation of human avatars at scale. The project website can be found at https://www.nikoskolot.com/avatarpopup/.
DiffHuman: Probabilistic Photorealistic 3D Reconstruction of Humans
Mar 30, 2024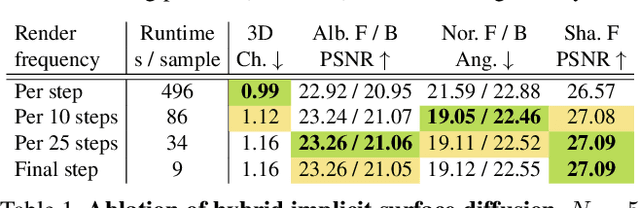

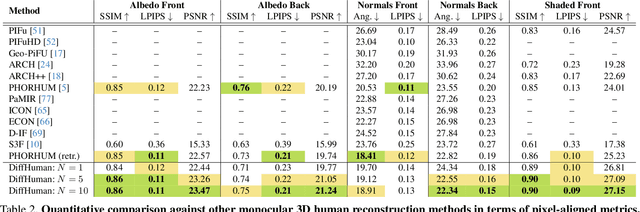
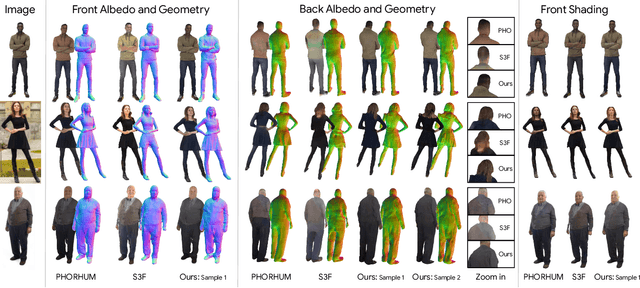
We present DiffHuman, a probabilistic method for photorealistic 3D human reconstruction from a single RGB image. Despite the ill-posed nature of this problem, most methods are deterministic and output a single solution, often resulting in a lack of geometric detail and blurriness in unseen or uncertain regions. In contrast, DiffHuman predicts a probability distribution over 3D reconstructions conditioned on an input 2D image, which allows us to sample multiple detailed 3D avatars that are consistent with the image. DiffHuman is implemented as a conditional diffusion model that denoises pixel-aligned 2D observations of an underlying 3D shape representation. During inference, we may sample 3D avatars by iteratively denoising 2D renders of the predicted 3D representation. Furthermore, we introduce a generator neural network that approximates rendering with considerably reduced runtime (55x speed up), resulting in a novel dual-branch diffusion framework. Our experiments show that DiffHuman can produce diverse and detailed reconstructions for the parts of the person that are unseen or uncertain in the input image, while remaining competitive with the state-of-the-art when reconstructing visible surfaces.
VLOGGER: Multimodal Diffusion for Embodied Avatar Synthesis
Mar 13, 2024We propose VLOGGER, a method for audio-driven human video generation from a single input image of a person, which builds on the success of recent generative diffusion models. Our method consists of 1) a stochastic human-to-3d-motion diffusion model, and 2) a novel diffusion-based architecture that augments text-to-image models with both spatial and temporal controls. This supports the generation of high quality video of variable length, easily controllable through high-level representations of human faces and bodies. In contrast to previous work, our method does not require training for each person, does not rely on face detection and cropping, generates the complete image (not just the face or the lips), and considers a broad spectrum of scenarios (e.g. visible torso or diverse subject identities) that are critical to correctly synthesize humans who communicate. We also curate MENTOR, a new and diverse dataset with 3d pose and expression annotations, one order of magnitude larger than previous ones (800,000 identities) and with dynamic gestures, on which we train and ablate our main technical contributions. VLOGGER outperforms state-of-the-art methods in three public benchmarks, considering image quality, identity preservation and temporal consistency while also generating upper-body gestures. We analyze the performance of VLOGGER with respect to multiple diversity metrics, showing that our architectural choices and the use of MENTOR benefit training a fair and unbiased model at scale. Finally we show applications in video editing and personalization.
Geometric Awareness in Neural Fields for 3D Human Registration
Dec 21, 2023Aligning a template to 3D human point clouds is a long-standing problem crucial for tasks like animation, reconstruction, and enabling supervised learning pipelines. Recent data-driven methods leverage predicted surface correspondences; however, they are not robust to varied poses or distributions. In contrast, industrial solutions often rely on expensive manual annotations or multi-view capturing systems. Recently, neural fields have shown promising results, but their purely data-driven nature lacks geometric awareness, often resulting in a trivial misalignment of the template registration. In this work, we propose two solutions: LoVD, a novel neural field model that predicts the direction towards the localized SMPL vertices on the target surface; and INT, the first self-supervised task dedicated to neural fields that, at test time, refines the backbone, exploiting the target geometry. We combine them into INLoVD, a robust 3D Human body registration pipeline trained on a large MoCap dataset. INLoVD is efficient (takes less than a minute), solidly achieves the state of the art over public benchmarks, and provides unprecedented generalization on out-of-distribution data. We will release code and checkpoints in \url{url}.
Structured 3D Features for Reconstructing Relightable and Animatable Avatars
Dec 13, 2022



We introduce Structured 3D Features, a model based on a novel implicit 3D representation that pools pixel-aligned image features onto dense 3D points sampled from a parametric, statistical human mesh surface. The 3D points have associated semantics and can move freely in 3D space. This allows for optimal coverage of the person of interest, beyond just the body shape, which in turn, additionally helps modeling accessories, hair, and loose clothing. Owing to this, we present a complete 3D transformer-based attention framework which, given a single image of a person in an unconstrained pose, generates an animatable 3D reconstruction with albedo and illumination decomposition, as a result of a single end-to-end model, trained semi-supervised, and with no additional postprocessing. We show that our S3F model surpasses the previous state-of-the-art on various tasks, including monocular 3D reconstruction, as well as albedo and shading estimation. Moreover, we show that the proposed methodology allows novel view synthesis, relighting, and re-posing the reconstruction, and can naturally be extended to handle multiple input images (e.g. different views of a person, or the same view, in different poses, in video). Finally, we demonstrate the editing capabilities of our model for 3D virtual try-on applications.
Learned Vertex Descent: A New Direction for 3D Human Model Fitting
May 12, 2022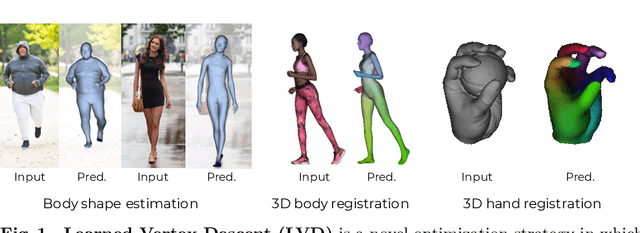
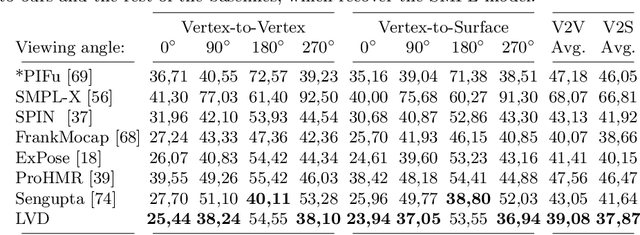
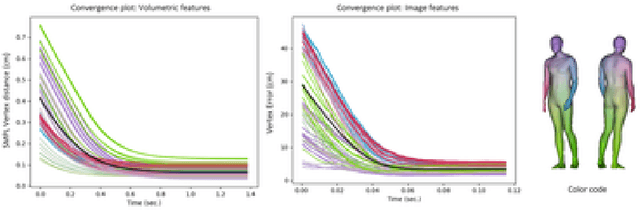
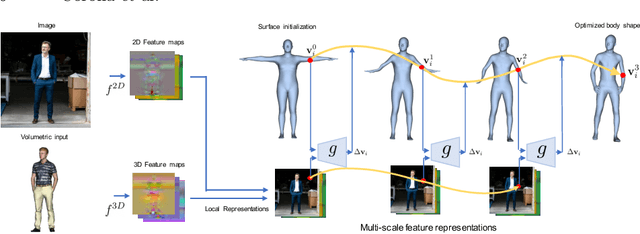
We propose a novel optimization-based paradigm for 3D human model fitting on images and scans. In contrast to existing approaches that directly regress the parameters of a low-dimensional statistical body model (e.g. SMPL) from input images, we train an ensemble of per-vertex neural fields network. The network predicts, in a distributed manner, the vertex descent direction towards the ground truth, based on neural features extracted at the current vertex projection. At inference, we employ this network, dubbed LVD, within a gradient-descent optimization pipeline until its convergence, which typically occurs in a fraction of a second even when initializing all vertices into a single point. An exhaustive evaluation demonstrates that our approach is able to capture the underlying body of clothed people with very different body shapes, achieving a significant improvement compared to state-of-the-art. LVD is also applicable to 3D model fitting of humans and hands, for which we show a significant improvement to the SOTA with a much simpler and faster method.
LISA: Learning Implicit Shape and Appearance of Hands
Apr 04, 2022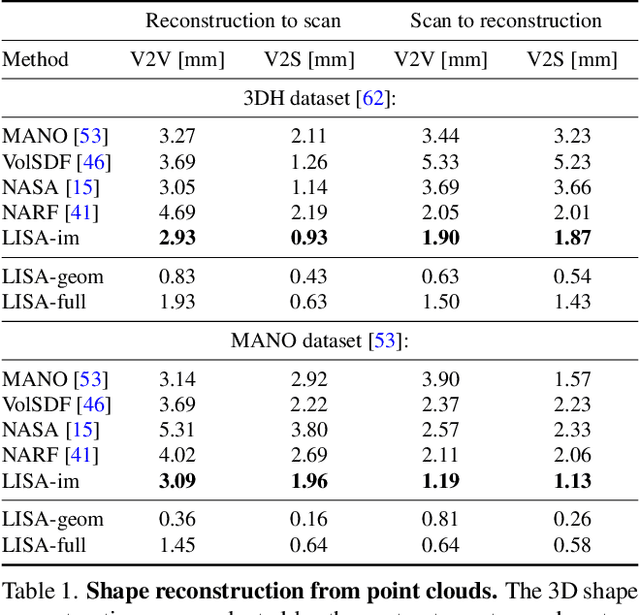
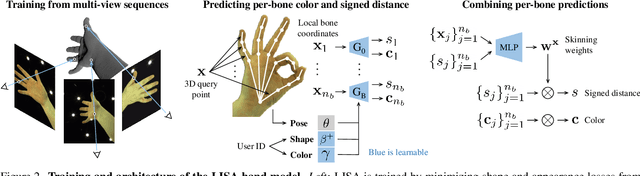
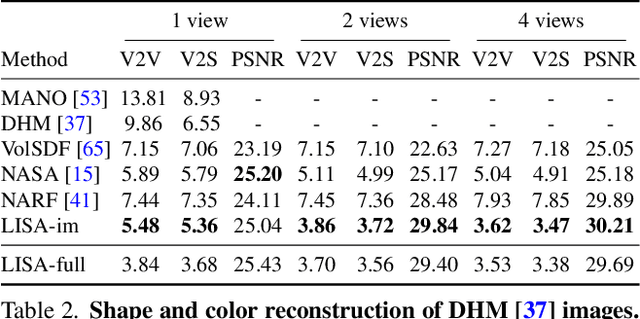

This paper proposes a do-it-all neural model of human hands, named LISA. The model can capture accurate hand shape and appearance, generalize to arbitrary hand subjects, provide dense surface correspondences, be reconstructed from images in the wild and easily animated. We train LISA by minimizing the shape and appearance losses on a large set of multi-view RGB image sequences annotated with coarse 3D poses of the hand skeleton. For a 3D point in the hand local coordinate, our model predicts the color and the signed distance with respect to each hand bone independently, and then combines the per-bone predictions using predicted skinning weights. The shape, color and pose representations are disentangled by design, allowing to estimate or animate only selected parameters. We experimentally demonstrate that LISA can accurately reconstruct a dynamic hand from monocular or multi-view sequences, achieving a noticeably higher quality of reconstructed hand shapes compared to baseline approaches. Project page: https://www.iri.upc.edu/people/ecorona/lisa/.
Enhancing Egocentric 3D Pose Estimation with Third Person Views
Jan 07, 2022


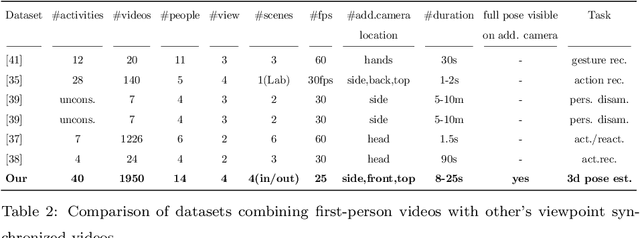
In this paper, we propose a novel approach to enhance the 3D body pose estimation of a person computed from videos captured from a single wearable camera. The key idea is to leverage high-level features linking first- and third-views in a joint embedding space. To learn such embedding space we introduce First2Third-Pose, a new paired synchronized dataset of nearly 2,000 videos depicting human activities captured from both first- and third-view perspectives. We explicitly consider spatial- and motion-domain features, combined using a semi-Siamese architecture trained in a self-supervised fashion. Experimental results demonstrate that the joint multi-view embedded space learned with our dataset is useful to extract discriminatory features from arbitrary single-view egocentric videos, without needing domain adaptation nor knowledge of camera parameters. We achieve significant improvement of egocentric 3D body pose estimation performance on two unconstrained datasets, over three supervised state-of-the-art approaches. Our dataset and code will be available for research purposes.
SMPLicit: Topology-aware Generative Model for Clothed People
Apr 02, 2021
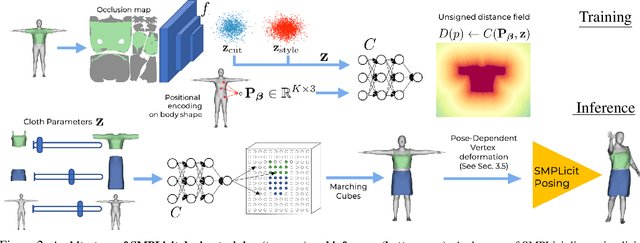

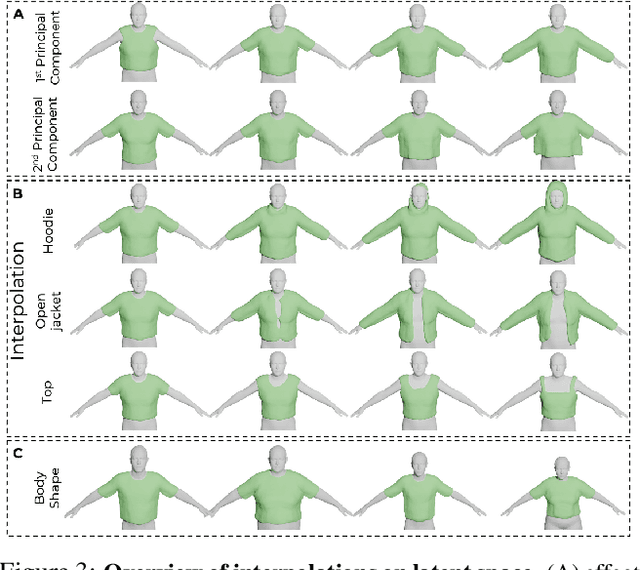
In this paper we introduce SMPLicit, a novel generative model to jointly represent body pose, shape and clothing geometry. In contrast to existing learning-based approaches that require training specific models for each type of garment, SMPLicit can represent in a unified manner different garment topologies (e.g. from sleeveless tops to hoodies and to open jackets), while controlling other properties like the garment size or tightness/looseness. We show our model to be applicable to a large variety of garments including T-shirts, hoodies, jackets, shorts, pants, skirts, shoes and even hair. The representation flexibility of SMPLicit builds upon an implicit model conditioned with the SMPL human body parameters and a learnable latent space which is semantically interpretable and aligned with the clothing attributes. The proposed model is fully differentiable, allowing for its use into larger end-to-end trainable systems. In the experimental section, we demonstrate SMPLicit can be readily used for fitting 3D scans and for 3D reconstruction in images of dressed people. In both cases we are able to go beyond state of the art, by retrieving complex garment geometries, handling situations with multiple clothing layers and providing a tool for easy outfit editing. To stimulate further research in this direction, we will make our code and model publicly available at http://www.iri.upc.edu/people/ecorona/smplicit/.
Multi-FinGAN: Generative Coarse-To-Fine Sampling of Multi-Finger Grasps
Dec 17, 2020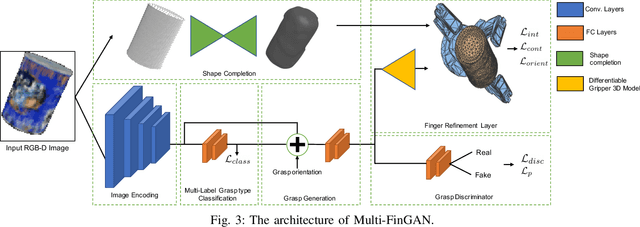
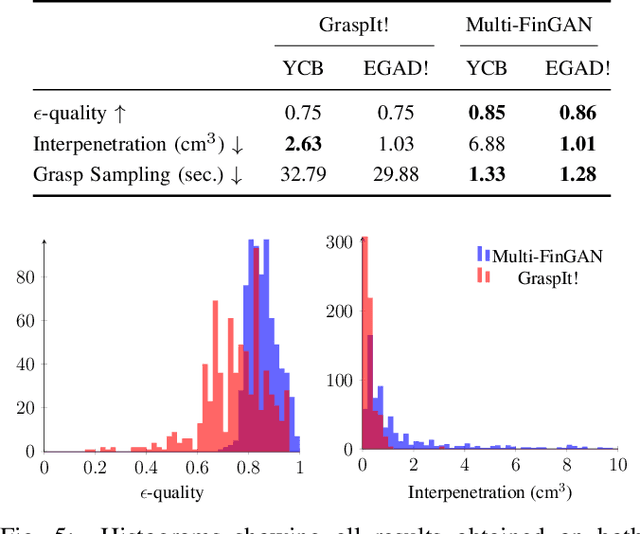
While there exists a large number of methods for manipulating rigid objects with parallel-jaw grippers, grasping with multi-finger robotic hands remains a quite unexplored research topic. Reasoning and planning collision-free trajectories on the additional degrees of freedom of several fingers represents an important challenge that, so far, involves computationally costly and slow processes. In this work, we present Multi-FinGAN, a fast generative multi-finger grasp sampling method that synthesizes high quality grasps directly from RGB-D images in about a second. We achieve this by training in an end-to-end fashion a coarse-to-fine model composed of a classification network that distinguishes grasp types according to a specific taxonomy and a refinement network that produces refined grasp poses and joint angles. We experimentally validate and benchmark our method against standard grasp-sampling methods on 790 grasps in simulation and 20 grasps on a real Franka Emika Panda. All experimental results using our method show consistent improvements both in terms of grasp quality metrics and grasp success rate. Remarkably, our approach is up to 20-30 times faster than the baseline, a significant improvement that opens the door to feedback-based grasp re-planning and task informative grasping.