 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReliable Reasoning with Large Language Models via Preference-Based Maximum Satisfiability
May 28, 2026Large Language Models (LLMs) excel at understanding natural language but struggle with optimisation tasks involving multiple constraints and user-defined preferences, which commonly arise in domains such as robotics. We propose a hybrid reasoning approach in which LLMs externalise reasoning through code generation. Given a natural language problem description, an LLM generates Python code that encodes user-defined constraints and preferences as a preference-based Maximum Satisfiability (MaxSAT) problem, which is then solved by an exact MaxSAT solver. To ensure correctness, solutions returned by the model-generated code are independently verified for feasibility and optimality against a canonical MaxSAT encoding, allowing for different encodings and multiple optimal solutions. We evaluate our approach using both open-source and closed-access LLMs on three families of preference-based reasoning tasks, and compare it against direct-answer, chain-of-thought, and program-of-thought baselines using the same models. While these baselines rarely produce feasible solutions, the MaxSAT-based pipeline achieves substantially higher acceptance rates, in some cases exceeding 80%. Our results demonstrate that LLM-driven code generation combined with preference-based MaxSAT enables solver-verifiable optimisation with respect to generated encodings, and substantially improves correctness under independently verified reference semantics.
COTONET: A custom cotton detection algorithm based on YOLO11 for stage of growth cotton boll detection
Mar 12, 2026Cotton harvesting is a critical phase where cotton capsules are physically manipulated and can lead to fibre degradation. To maintain the highest quality, harvesting methods must emulate delicate manual grasping, to preserve cotton's intrinsic properties. Automating this process requires systems capable of recognising cotton capsules across various phenological stages. To address this challenge, we propose COTONET, an enhanced custom YOLO11 model tailored with attention mechanisms to improve the detection of difficult instances. The architecture incorporates gradients in non-learnable operations to enhance shape and feature extraction. Key architectural modifications include: the replacement of convolutional blocks with Squeeze-and-Exitation blocks, a redesigned backbone integrating attention mechanisms, and the substitution of standard upsampling operations for Content Aware Reassembly of Features (CARAFE). Additionally, we integrate Simple Attention Modules (SimAM) for primary feature aggregation and Parallel Hybrid Attention Mechanisms (PHAM) for channel-wise, spatial-wise and coordinate-wise attention in the downward neck path. This configuration offers increased flexibility and robustness for interpreting the complexity of cotton crop growth. COTONET aligns with small-to-medium YOLO models utilizing 7.6M parameters and 27.8 GFLOPS, making it suitable for low-resource edge computing and mobile robotics. COTONET outperforms the standard YOLO baselines, achieving a mAP50 of 81.1% and a mAP50-95 of 60.6%.
From User Preferences to Base Score Extraction Functions in Gradual Argumentation (with Appendix)
Feb 17, 2026Gradual argumentation is a field of symbolic AI which is attracting attention for its ability to support transparent and contestable AI systems. It is considered a useful tool in domains such as decision-making, recommendation, debate analysis, and others. The outcomes in such domains are usually dependent on the arguments' base scores, which must be selected carefully. Often, this selection process requires user expertise and may not always be straightforward. On the other hand, organising the arguments by preference could simplify the task. In this work, we introduce \emph{Base Score Extraction Functions}, which provide a mapping from users' preferences over arguments to base scores. These functions can be applied to the arguments of a \emph{Bipolar Argumentation Framework} (BAF), supplemented with preferences, to obtain a \emph{Quantitative Bipolar Argumentation Framework} (QBAF), allowing the use of well-established computational tools in gradual argumentation. We outline the desirable properties of base score extraction functions, discuss some design choices, and provide an algorithm for base score extraction. Our method incorporates an approximation of non-linearities in human preferences to allow for better approximation of the real ones. Finally, we evaluate our approach both theoretically and experimentally in a robotics setting, and offer recommendations for selecting appropriate gradual semantics in practice.
Ontological grounding for sound and natural robot explanations via large language models
Feb 14, 2026Building effective human-robot interaction requires robots to derive conclusions from their experiences that are both logically sound and communicated in ways aligned with human expectations. This paper presents a hybrid framework that blends ontology-based reasoning with large language models (LLMs) to produce semantically grounded and natural robot explanations. Ontologies ensure logical consistency and domain grounding, while LLMs provide fluent, context-aware and adaptive language generation. The proposed method grounds data from human-robot experiences, enabling robots to reason about whether events are typical or atypical based on their properties. We integrate a state-of-the-art algorithm for retrieving and constructing static contrastive ontology-based narratives with an LLM agent that uses them to produce concise, clear, interactive explanations. The approach is validated through a laboratory study replicating an industrial collaborative task. Empirical results show significant improvements in the clarity and brevity of ontology-based narratives while preserving their semantic accuracy. Initial evaluations further demonstrate the system's ability to adapt explanations to user feedback. Overall, this work highlights the potential of ontology-LLM integration to advance explainable agency, and promote more transparent human-robot collaboration.
HEXAR: a Hierarchical Explainability Architecture for Robots
Jan 06, 2026As robotic systems become increasingly complex, the need for explainable decision-making becomes critical. Existing explainability approaches in robotics typically either focus on individual modules, which can be difficult to query from the perspective of high-level behaviour, or employ monolithic approaches, which do not exploit the modularity of robotic architectures. We present HEXAR (Hierarchical EXplainability Architecture for Robots), a novel framework that provides a plug-in, hierarchical approach to generate explanations about robotic systems. HEXAR consists of specialised component explainers using diverse explanation techniques (e.g., LLM-based reasoning, causal models, feature importance, etc) tailored to specific robot modules, orchestrated by an explainer selector that chooses the most appropriate one for a given query. We implement and evaluate HEXAR on a TIAGo robot performing assistive tasks in a home environment, comparing it against end-to-end and aggregated baseline approaches across 180 scenario-query variations. We observe that HEXAR significantly outperforms baselines in root cause identification, incorrect information exclusion, and runtime, offering a promising direction for transparent autonomous systems.
Multi-User Personalisation in Human-Robot Interaction: Using Quantitative Bipolar Argumentation Frameworks for Preferences Conflict Resolution
Nov 05, 2025While personalisation in Human-Robot Interaction (HRI) has advanced significantly, most existing approaches focus on single-user adaptation, overlooking scenarios involving multiple stakeholders with potentially conflicting preferences. To address this, we propose the Multi-User Preferences Quantitative Bipolar Argumentation Framework (MUP-QBAF), a novel multi-user personalisation framework based on Quantitative Bipolar Argumentation Frameworks (QBAFs) that explicitly models and resolves multi-user preference conflicts. Unlike prior work in Argumentation Frameworks, which typically assumes static inputs, our approach is tailored to robotics: it incorporates both users' arguments and the robot's dynamic observations of the environment, allowing the system to adapt over time and respond to changing contexts. Preferences, both positive and negative, are represented as arguments whose strength is recalculated iteratively based on new information. The framework's properties and capabilities are presented and validated through a realistic case study, where an assistive robot mediates between the conflicting preferences of a caregiver and a care recipient during a frailty assessment task. This evaluation further includes a sensitivity analysis of argument base scores, demonstrating how preference outcomes can be shaped by user input and contextual observations. By offering a transparent, structured, and context-sensitive approach to resolving competing user preferences, this work advances the field of multi-user HRI. It provides a principled alternative to data-driven methods, enabling robots to navigate conflicts in real-world environments.
Ontological foundations for contrastive explanatory narration of robot plans
Sep 26, 2025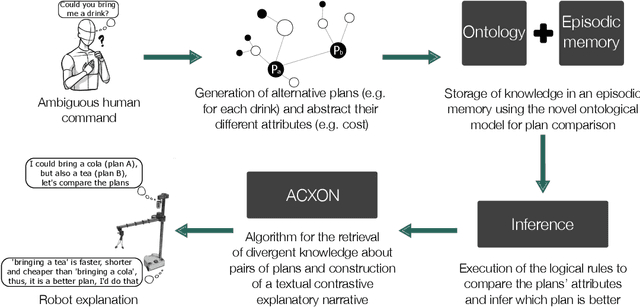
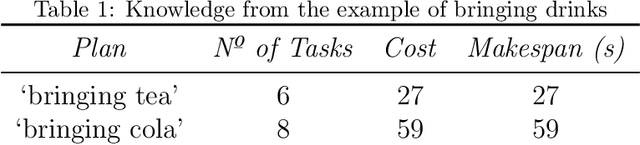
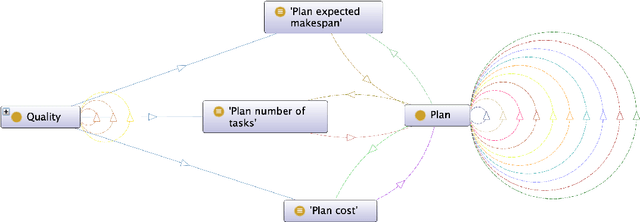
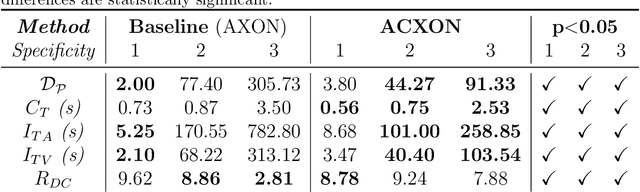
Mutual understanding of artificial agents' decisions is key to ensuring a trustworthy and successful human-robot interaction. Hence, robots are expected to make reasonable decisions and communicate them to humans when needed. In this article, the focus is on an approach to modeling and reasoning about the comparison of two competing plans, so that robots can later explain the divergent result. First, a novel ontological model is proposed to formalize and reason about the differences between competing plans, enabling the classification of the most appropriate one (e.g., the shortest, the safest, the closest to human preferences, etc.). This work also investigates the limitations of a baseline algorithm for ontology-based explanatory narration. To address these limitations, a novel algorithm is presented, leveraging divergent knowledge between plans and facilitating the construction of contrastive narratives. Through empirical evaluation, it is observed that the explanations excel beyond the baseline method.
Temporal Counterfactual Explanations of Behaviour Tree Decisions
Sep 09, 2025Explainability is a critical tool in helping stakeholders understand robots. In particular, the ability for robots to explain why they have made a particular decision or behaved in a certain way is useful in this regard. Behaviour trees are a popular framework for controlling the decision-making of robots and other software systems, and thus a natural question to ask is whether or not a system driven by a behaviour tree is capable of answering "why" questions. While explainability for behaviour trees has seen some prior attention, no existing methods are capable of generating causal, counterfactual explanations which detail the reasons for robot decisions and behaviour. Therefore, in this work, we introduce a novel approach which automatically generates counterfactual explanations in response to contrastive "why" questions. Our method achieves this by first automatically building a causal model from the structure of the behaviour tree as well as domain knowledge about the state and individual behaviour tree nodes. The resultant causal model is then queried and searched to find a set of diverse counterfactual explanations. We demonstrate that our approach is able to correctly explain the behaviour of a wide range of behaviour tree structures and states. By being able to answer a wide range of causal queries, our approach represents a step towards more transparent, understandable and ultimately trustworthy robotic systems.
Unfolding the Literature: A Review of Robotic Cloth Manipulation
Jul 01, 2024



The realm of textiles spans clothing, households, healthcare, sports, and industrial applications. The deformable nature of these objects poses unique challenges that prior work on rigid objects cannot fully address. The increasing interest within the community in textile perception and manipulation has led to new methods that aim to address challenges in modeling, perception, and control, resulting in significant progress. However, this progress is often tailored to one specific textile or a subcategory of these textiles. To understand what restricts these methods and hinders current approaches from generalizing to a broader range of real-world textiles, this review provides an overview of the field, focusing specifically on how and to what extent textile variations are addressed in modeling, perception, benchmarking, and manipulation of textiles. We finally conclude by identifying key open problems and outlining grand challenges that will drive future advancements in the field.
Standardization of Cloth Objects and its Relevance in Robotic Manipulation
Mar 07, 2024The field of robotics faces inherent challenges in manipulating deformable objects, particularly in understanding and standardising fabric properties like elasticity, stiffness, and friction. While the significance of these properties is evident in the realm of cloth manipulation, accurately categorising and comprehending them in real-world applications remains elusive. This study sets out to address two primary objectives: (1) to provide a framework suitable for robotics applications to characterise cloth objects, and (2) to study how these properties influence robotic manipulation tasks. Our preliminary results validate the framework's ability to characterise cloth properties and compare cloth sets, and reveal the influence that different properties have on the outcome of five manipulation primitives. We believe that, in general, results on the manipulation of clothes should be reported along with a better description of the garments used in the evaluation. This paper proposes a set of these measures.
* 2024 ICRA International Conference on Robotics and Automation (ICRA)