 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual Unscented Kalman Filter Architecture for Sensor Fusion in Water Networks Leak Localization
Dec 16, 2024



Leakage in water systems results in significant daily water losses, degrading service quality, increasing costs, and aggravating environmental problems. Most leak localization methods rely solely on pressure data, missing valuable information from other sensor types. This article proposes a hydraulic state estimation methodology based on a dual Unscented Kalman Filter (UKF) approach, which enhances the estimation of both nodal hydraulic heads, critical in localization tasks, and pipe flows, useful for operational purposes. The approach enables the fusion of different sensor types, such as pressure, flow and demand meters. The strategy is evaluated in well-known open source case studies, namely Modena and L-TOWN, showing improvements over other state-of-the-art estimation approaches in terms of interpolation accuracy, as well as more precise leak localization performance in L-TOWN.
Behavior Trees in Functional Safety Supervisors for Autonomous Vehicles
Oct 03, 2024



The rapid advancements in autonomous vehicle software present both opportunities and challenges, especially in enhancing road safety. The primary objective of autonomous vehicles is to reduce accident rates through improved safety measures. However, the integration of new algorithms into the autonomous vehicle, such as Artificial Intelligence methods, raises concerns about the compliance with established safety regulations. This paper introduces a novel software architecture based on behavior trees, aligned with established standards and designed to supervise vehicle functional safety in real time. It specifically addresses the integration of algorithms into industrial road vehicles, adhering to the ISO 26262. The proposed supervision methodology involves the detection of hazards and compliance with functional and technical safety requirements when a hazard arises. This methodology, implemented in this study in a Renault M\'egane (currently at SAE level 3 of automation), not only guarantees compliance with safety standards, but also paves the way for safer and more reliable autonomous driving technologies.
Nodal Hydraulic Head Estimation through Unscented Kalman Filter for Data-driven Leak Localization in Water Networks
Nov 27, 2023In this paper, we present a nodal hydraulic head estimation methodology for water distribution networks (WDN) based on an Unscented Kalman Filter (UKF) scheme with application to leak localization. The UKF refines an initial estimation of the hydraulic state by considering the prediction model, as well as available pressure and demand measurements. To this end, it provides customized prediction and data assimilation steps. Additionally, the method is enhanced by dynamically updating the prediction function weight matrices. Performance testing on the Modena benchmark under realistic conditions demonstrates the method's effectiveness in enhancing state estimation and data-driven leak localization.
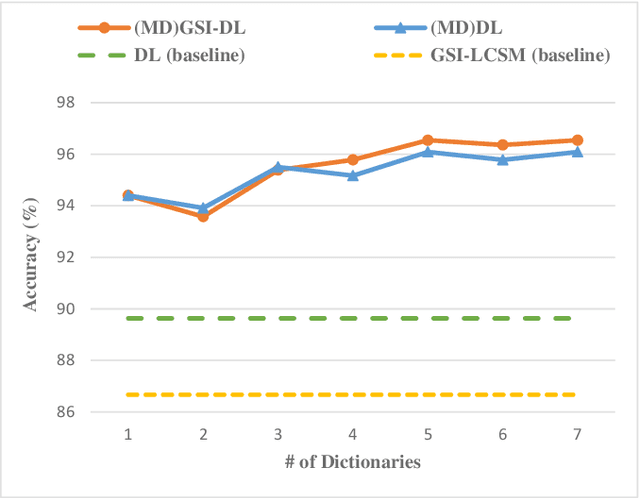
Learning Dictionaries from Physical-Based Interpolation for Water Network Leak Localization
Apr 21, 2023This article presents a leak localization methodology based on state estimation and learning. The first is handled by an interpolation scheme, whereas dictionary learning is considered for the second stage. The novel proposed interpolation technique exploits the physics of the interconnections between hydraulic heads of neighboring nodes in water distribution networks. Additionally, residuals are directly interpolated instead of hydraulic head values. The results of applying the proposed method to a well-known case study (Modena) demonstrated the improvements of the new interpolation method with respect to a state-of-the-art approach, both in terms of interpolation error (considering state and residual estimation) and posterior localization.
A Nonlinear Model Predictive Control Strategy for Autonomous Racing of Scale Vehicles
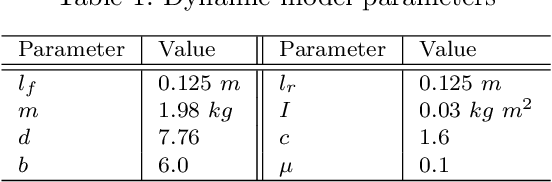
Feb 09, 2023A Nonlinear Model Predictive Control (NMPC) strategy aimed at controlling a small-scale car model for autonomous racing competitions is presented in this paper. The proposed control strategy is concerned with minimizing the lap time while keeping the vehicle within track boundaries. The optimization problem considers both the vehicle's actuation limits and the lateral and longitudinal forces acting on the car modeled through the Pacejka's magic formula and a simple drivetrain model. Furthermore, the approach allows to safely race on a track populated by static obstacles generating collision-free trajectories and tracking them while enhancing the lap timing performance. Gazebo simulations using the F1/10 simulator showcase the feasibility and validity of the proposed control strategy. The code is released as open-source making it possible to replicate the obtained results.
* 6 pages, 8 figures, conference
LMI-based Variable Impedance Controller design from User Demonstrations and Preferences
Sep 21, 2022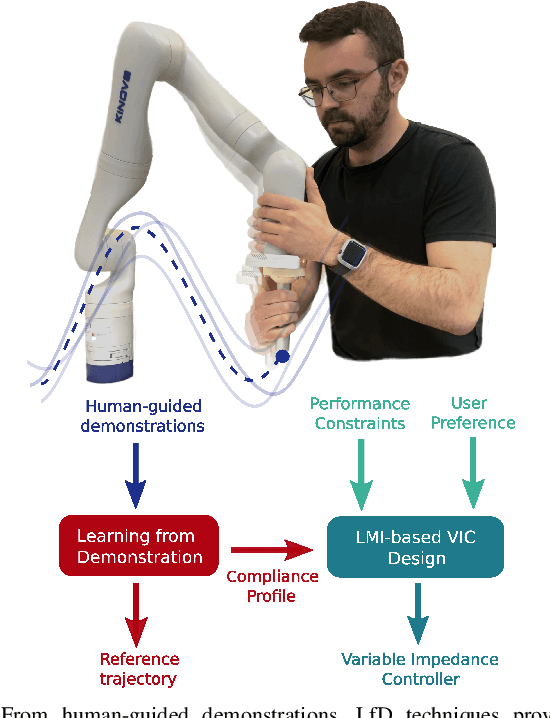
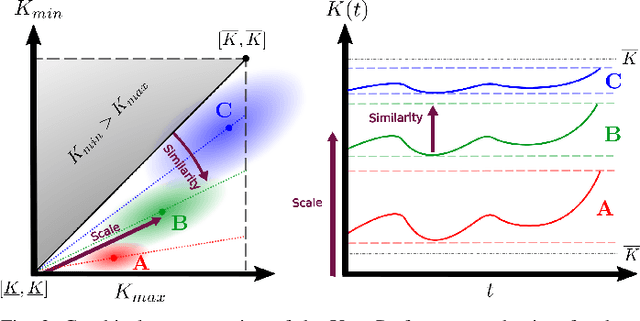

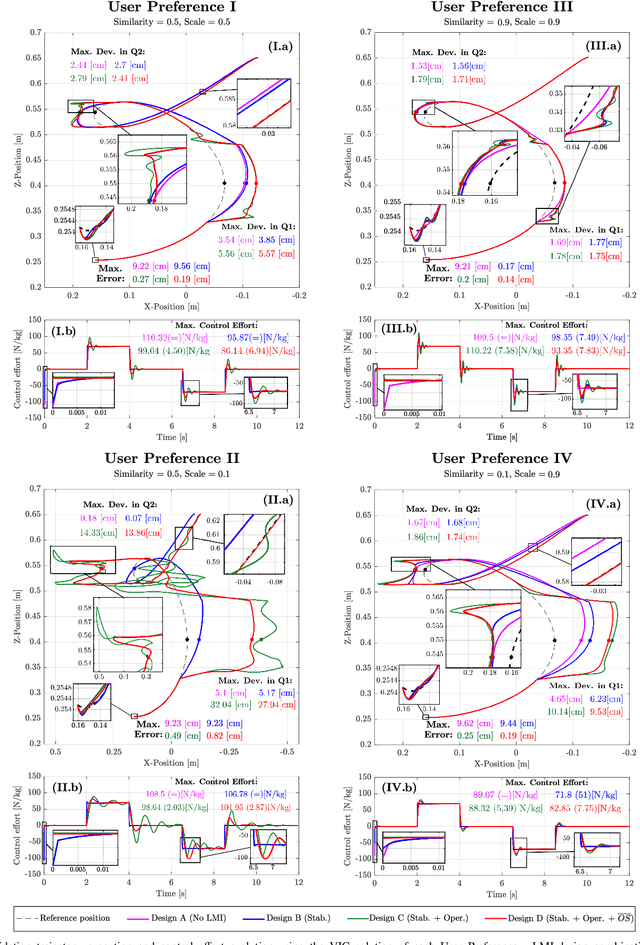
In this paper, we introduce a new off-line method to find suitable parameters of a Variable Impedance Control using the Learning from Demonstrations (LfD) paradigm, fulfilling stability and performance constraints while taking into account user's intuition over the task. Considering a compliance profile obtained from human demonstrations, a Linear Parameter Varying (LPV) description of the VIC is given, which allows to state the design problem including stability and performance constraints as Linear Matrix Inequalities (LMIs). Therefore, using a solution-search method, we find the optimal solutions in terms of performance according to user preferences on the desired behaviour for the task. The design problem is validated by comparing the execution from the obtained controller against solutions from designs with relaxed conditions for different user preference sets in a 2-D trajectory tracking task. A pulley looping task is presented as a case study to evaluate the performance of the variable impedance controller against a constant one and its agility and leanness on two one-off modifications of the setup using the user preference mechanism. All the experiments have been performed using a 7-DoF KINOVA Gen3 manipulator.
Data-driven Leak Localization in Water Distribution Networks via Dictionary Learning and Graph-based Interpolation
Oct 12, 2021

In this paper, we propose a data-driven leak localization method for water distribution networks (WDNs) which combines two complementary approaches: graph-based interpolation and dictionary classification. The former estimates the complete WDN hydraulic state (i.e., hydraulic heads) from real measurements at certain nodes and the network graph. Then, these actual measurements, together with a subset of valuable estimated states, are used to feed and train the dictionary learning scheme. Thus, the meshing of these two methods is explored, showing that its performance is superior to either approach alone, even deriving different mechanisms to increase its resilience to classical problems (e.g., dimensionality, interpolation errors, etc.). The approach is validated using the L-TOWN benchmark proposed at BattLeDIM2020.
TS-MPC for Autonomous Vehicle using a Learning Approach
Apr 29, 2020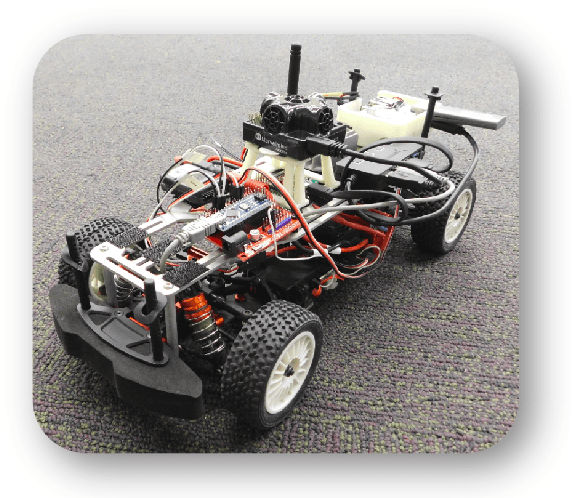
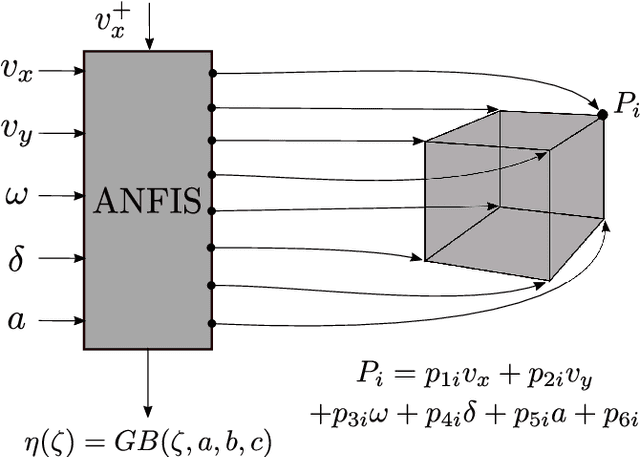
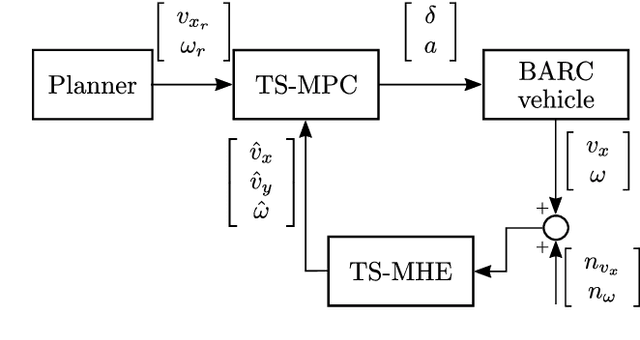
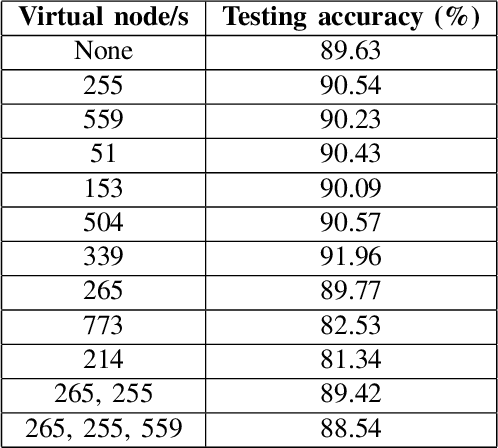
In this paper, the Model Predictive Control (MPC) and Moving Horizon Estimator (MHE) strategies using a data-driven approach to learn a Takagi-Sugeno (TS) representation of the vehicle dynamics are proposed to solve autonomous driving control problems in real-time. To address the TS modeling, we use the Adaptive Neuro-Fuzzy Inference System (ANFIS) approach to obtain a set of polytopic-based linear representations as well as a set of membership functions relating in a non-linear way the different linear subsystems. The proposed control approach is provided by racing-based references of an external planner and estimations from the MHE offering a high driving performance in racing mode. The control-estimation scheme is tested in a simulated racing environment to show the potential of the presented approaches.
Fault Handling in Large Water Networks with Online Dictionary Learning
Mar 18, 2020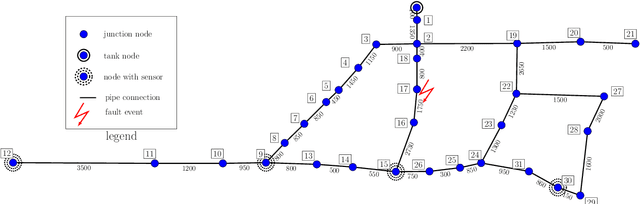


Fault detection and isolation in water distribution networks is an active topic due to its model's mathematical complexity and increased data availability through sensor placement. Here we simplify the model by offering a data driven alternative that takes the network topology into account when performing sensor placement and then proceeds to build a network model through online dictionary learning based on the incoming sensor data. Online learning is fast and allows tackling large networks as it processes small batches of signals at a time and has the benefit of continuous integration of new data into the existing network model, be it in the beginning for training or in production when new data samples are encountered. The algorithms show good performance when tested on both small and large-scale networks.
Gain Scheduling LPV Control Scheme for the Autonomous Guidance Problem using a Dynamic Modelling Approach
Dec 01, 2017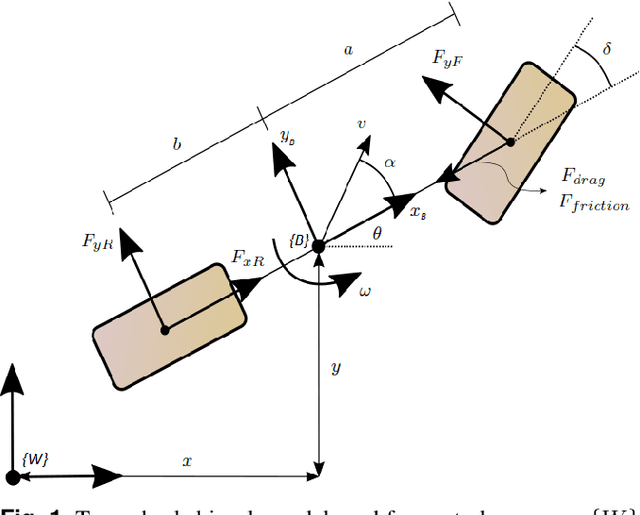
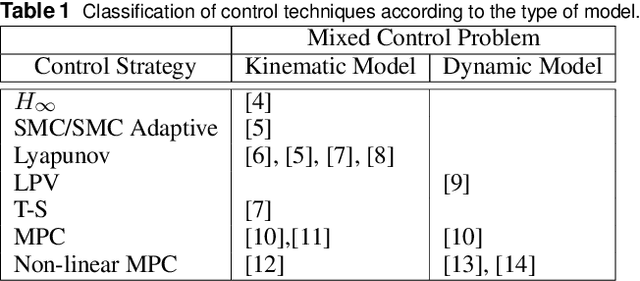
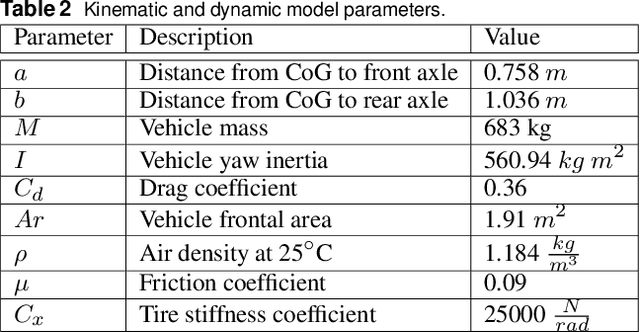
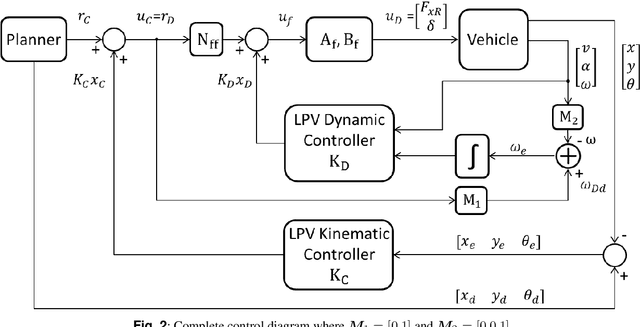
This work proposes a solution for the longitudinal and lateral control problem of urban autonomous vehicles using a gain scheduling LPV control approach. Using the kinematic and dynamic vehicle models, a linear parameter varying (LPV) representation is adopted and a cascade control methodology is proposed for controlling both vehicle behaviours. In particular, for the control design, the use of both models separately lead to solve two LPV LMI-LQR problems. Furthermore, to achieve the desired levels of performance, an approach based on cascade design of the the kinematic and dynamic controllers has been proposed. This cascade control scheme is based on the idea that the dynamic closed loop behaviour is designed to be faster than the kinematic closed loop one. The obtained gain scheduling LPV control approach, jointly with a trajectory generation module, has presented suitable results in a simulated city driving scenario.