 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLMI-based Variable Impedance Controller design from User Demonstrations and Preferences
Paper and Code
Sep 21, 2022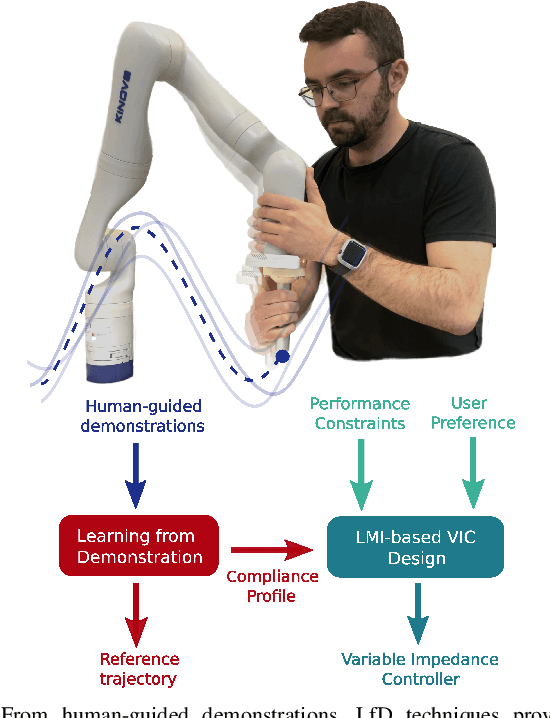
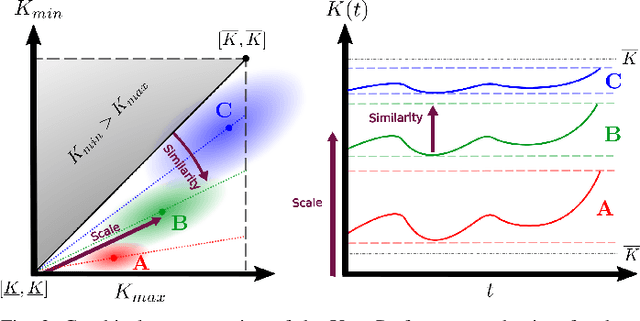

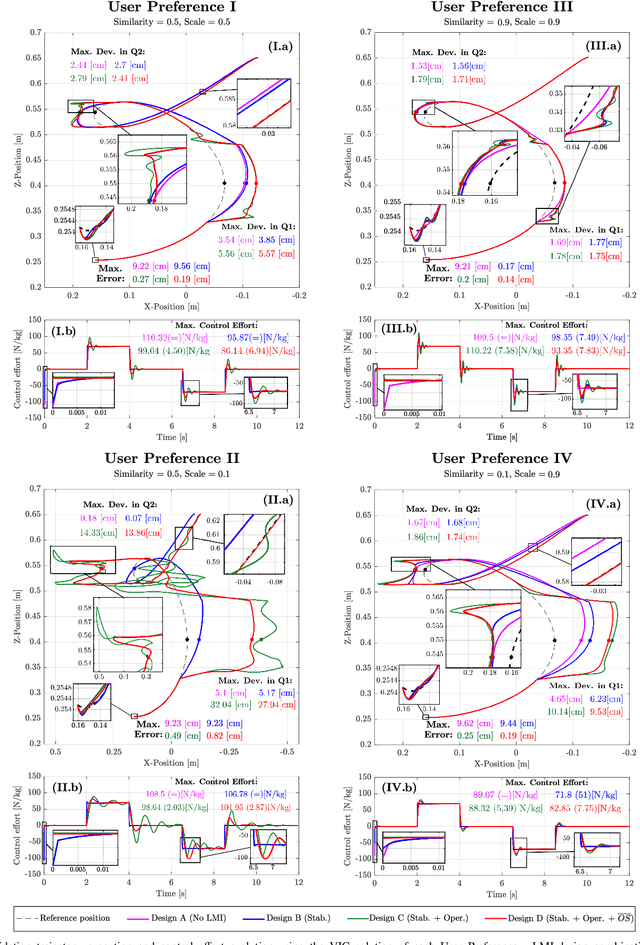
In this paper, we introduce a new off-line method to find suitable parameters of a Variable Impedance Control using the Learning from Demonstrations (LfD) paradigm, fulfilling stability and performance constraints while taking into account user's intuition over the task. Considering a compliance profile obtained from human demonstrations, a Linear Parameter Varying (LPV) description of the VIC is given, which allows to state the design problem including stability and performance constraints as Linear Matrix Inequalities (LMIs). Therefore, using a solution-search method, we find the optimal solutions in terms of performance according to user preferences on the desired behaviour for the task. The design problem is validated by comparing the execution from the obtained controller against solutions from designs with relaxed conditions for different user preference sets in a 2-D trajectory tracking task. A pulley looping task is presented as a case study to evaluate the performance of the variable impedance controller against a constant one and its agility and leanness on two one-off modifications of the setup using the user preference mechanism. All the experiments have been performed using a 7-DoF KINOVA Gen3 manipulator.