 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEncoding cloth manipulations using a graph of states and transitions
Paper and Code
Sep 30, 2020
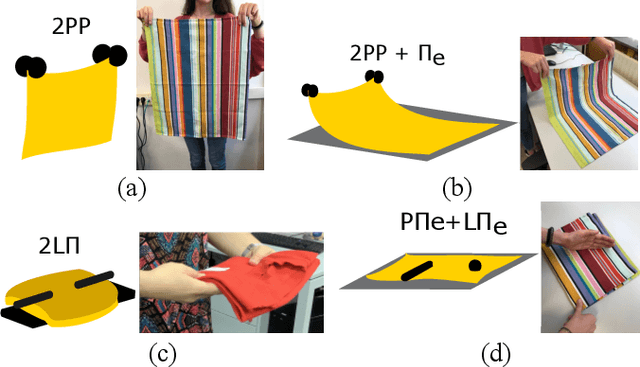
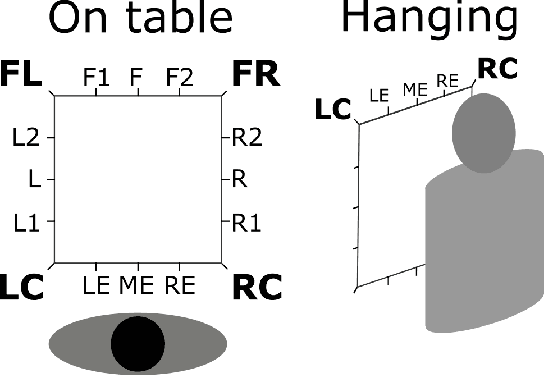

Cloth manipulation is very relevant for domestic robotic tasks, but it presents many challenges due to the complexity of representing, recognizing and predicting behaviour of cloth under manipulation. In this work, we propose a generic, compact and simplified representation of the states of cloth manipulation that allows for representing tasks as sequences of states and transitions. We also define a graph of manipulation primitives that encodes all the strategies to accomplish a task. Our novel representation is used to encode the task of folding a napkin, learned from an experiment with human subjects with video and motion data. We show how our simplified representation allows to obtain a map of meaningful motion primitives and to segment the motion data to obtain sets of trajectories, velocity and acceleration profiles corresponding to each manipulation primitive in the graph.