 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic robotic cloth folding with efficient Koopman operator-based model predictive control
May 18, 2026Robotic cloth folding is a challenging task, particularly when considering dynamic folding tasks, which aim at folding cloth by fast motions that leverage its dynamics. When subject to such fast motions, the complexity of cloth dynamics hinders both system identification and planning of folding trajectories, resulting in a difficult simulation-to-reality transfer when using physical models of cloth. Compared to the dexterity that humans exhibit when performing folding tasks, robotic approaches usually employ small garments with quite rigid dynamics, and are either too slow, or fast but imprecise, requiring several attempts to achieve a reasonably good fold. In this paper, we tackle these challenges by generating fast folding trajectories with a novel model predictive controller, integrating physics-based simulation of cloth dynamics and efficient, kernel-based Koopman operator regression. Koopman operator regression, an increasingly popular machine learning technique for nonlinear system identification, is used to obtain a linear model for the cloth being folded. Such a surrogate model, trained with data from a high-fidelity, physics-based cloth simulator, can then be employed within a suitable model predictive control algorithm, in place of the costly, nonlinear one, to efficiently generate folding trajectories to be executed by a robotic manipulator. Both in simulated and real-robot experiments, we show how the linearization supplied by the Koopman operator-based model can be employed to efficiently generate fast folding trajectories to unseen poses, without sacrificing folding accuracy.
A gripper for flap separation and opening of sealed bags
Mar 11, 2026Separating thin, flexible layers that must be individually grasped is a common but challenging manipulation primitive for most off-the-shelf grippers. A prominent example arises in clinical settings: the opening of sterile flat pouches for the preparation of the operating room, where the first step is to separate and grasp the flaps. We present a novel gripper design and opening strategy that enables reliable flap separation and robust seal opening. This capability addresses a high-volume repetitive hospital procedure in which nurses manually open up to 240 bags per shift, a physically demanding task linked to musculoskeletal injuries. Our design combines an active dented-roller fingertip with compliant fingers that exploit environmental constraints to robustly grasp thin flexible flaps. Experiments demonstrate that the proposed gripper reliably grasps and separates sealed bag flaps and other thin-layered materials from the hospital, the most sensitive variable affecting performance being the normal force applied. When two copies of the gripper grasp both flaps, the system withstands the forces needed to open the seals robustly. To our knowledge, this is one of the first demonstrations of robotic assistance to automate this repetitive, low-value, but critical hospital task.
Beyond Static Perception: Integrating Temporal Context into VLMs for Cloth Folding
May 12, 2025Manipulating clothes is challenging due to their complex dynamics, high deformability, and frequent self-occlusions. Garments exhibit a nearly infinite number of configurations, making explicit state representations difficult to define. In this paper, we analyze BiFold, a model that predicts language-conditioned pick-and-place actions from visual observations, while implicitly encoding garment state through end-to-end learning. To address scenarios such as crumpled garments or recovery from failed manipulations, BiFold leverages temporal context to improve state estimation. We examine the internal representations of the model and present evidence that its fine-tuning and temporal context enable effective alignment between text and image regions, as well as temporal consistency.
CloSE: A Compact Shape- and Orientation-Agnostic Cloth State Representation
Apr 07, 2025Cloth manipulation is a difficult problem mainly because of the non-rigid nature of cloth, which makes a good representation of deformation essential. We present a new representation for the deformation-state of clothes. First, we propose the dGLI disk representation, based on topological indices computed for segments on the edges of the cloth mesh border that are arranged on a circular grid. The heat-map of the dGLI disk uncovers patterns that correspond to features of the cloth state that are consistent for different shapes, sizes of positions of the cloth, like the corners and the fold locations. We then abstract these important features from the dGLI disk onto a circle, calling it the Cloth StatE representation (CloSE). This representation is compact, continuous, and general for different shapes. Finally, we show the strengths of this representation in two relevant applications: semantic labeling and high- and low-level planning. The code, the dataset and the video can be accessed from : https://jaykamat99.github.io/close-representation
BiFold: Bimanual Cloth Folding with Language Guidance
Jan 27, 2025Cloth folding is a complex task due to the inevitable self-occlusions of clothes, their complicated dynamics, and the disparate materials, geometries, and textures that garments can have. In this work, we learn folding actions conditioned on text commands. Translating high-level, abstract instructions into precise robotic actions requires sophisticated language understanding and manipulation capabilities. To do that, we leverage a pre-trained vision-language model and repurpose it to predict manipulation actions. Our model, BiFold, can take context into account and achieves state-of-the-art performance on an existing language-conditioned folding benchmark. Given the lack of annotated bimanual folding data, we devise a procedure to automatically parse actions of a simulated dataset and tag them with aligned text instructions. BiFold attains the best performance on our dataset and can transfer to new instructions, garments, and environments.
T-DOM: A Taxonomy for Robotic Manipulation of Deformable Objects
Dec 30, 2024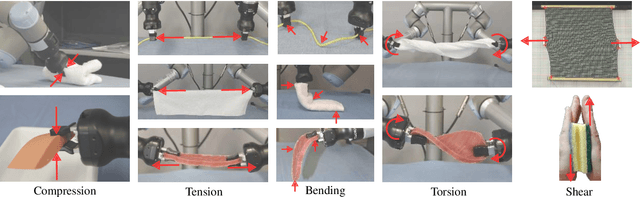
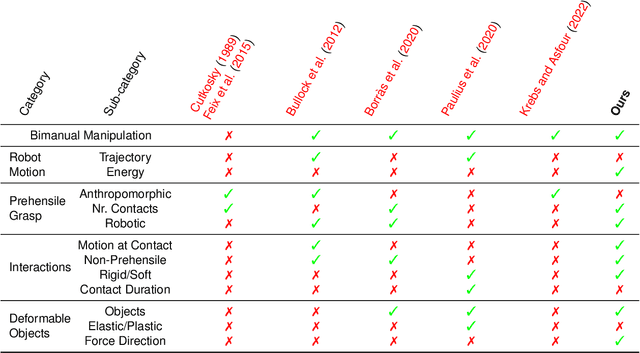
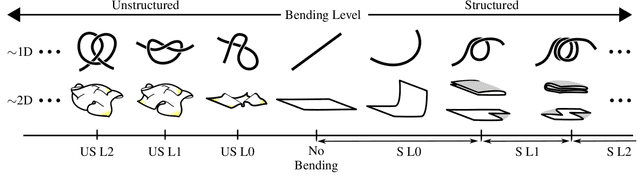
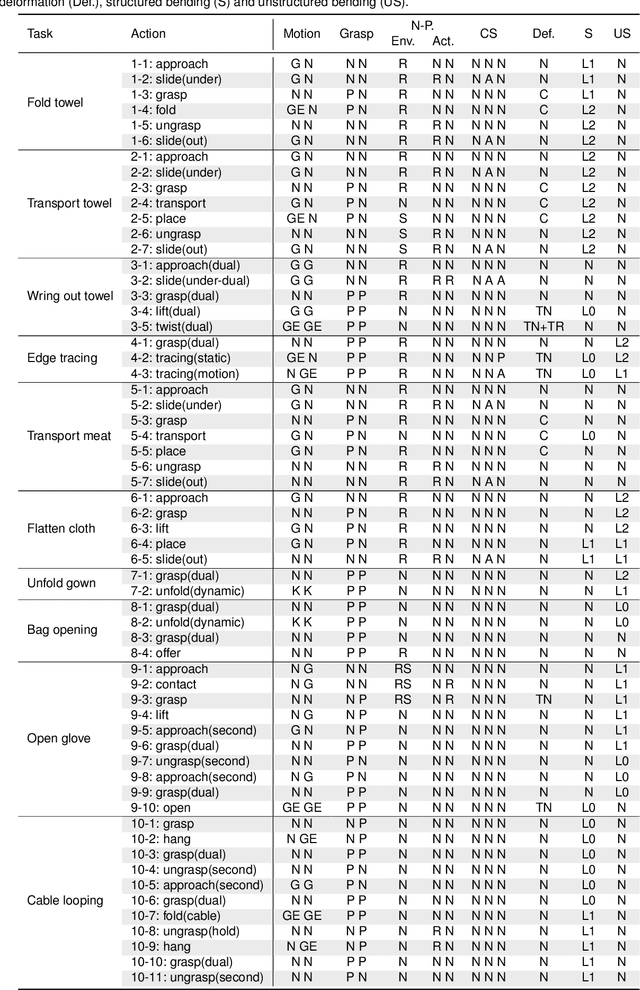
Robotic grasp and manipulation taxonomies, inspired by observing human manipulation strategies, can provide key guidance for tasks ranging from robotic gripper design to the development of manipulation algorithms. The existing grasp and manipulation taxonomies, however, often assume object rigidity, which limits their ability to reason about the complex interactions in the robotic manipulation of deformable objects. Hence, to assist in tasks involving deformable objects, taxonomies need to capture more comprehensively the interactions inherent in deformable object manipulation. To this end, we introduce T-DOM, a taxonomy that analyses key aspects involved in the manipulation of deformable objects, such as robot motion, forces, prehensile and non-prehensile interactions and, for the first time, a detailed classification of object deformations. To evaluate T-DOM, we curate a dataset of ten tasks involving a variety of deformable objects, such as garments, ropes, and surgical gloves, as well as diverse types of deformations. We analyse the proposed tasks comparing the T-DOM taxonomy with previous well established manipulation taxonomies. Our analysis demonstrates that T-DOM can effectively distinguish between manipulation skills that were not identified in other taxonomies, across different deformable objects and manipulation actions, offering new categories to characterize a skill. The proposed taxonomy significantly extends past work, providing a more fine-grained classification that can be used to describe the robotic manipulation of deformable objects. This work establishes a foundation for advancing deformable object manipulation, bridging theoretical understanding and practical implementation in robotic systems.
Surface reconstruction of sampled textiles via Morse theory
May 27, 2024In this work, we study the perception problem for garments using tools from computational topology: the identification of their geometry and position in space from point-cloud samples, as obtained e.g. with 3D scanners. We present a reconstruction algorithm based on a direct topological study of the sampled textile surface that allows us to obtain a cellular decomposition of it via a Morse function. No intermediate triangulation or local implicit equations are used, avoiding reconstruction-induced artifices. No a priori knowledge of the surface topology, density or regularity of the point-sample is required to run the algorithm. The results are a piecewise decomposition of the surface as a union of Morse cells (i.e. topological disks), suitable for tasks such as noise-filtering or mesh-independent reparametrization, and a cell complex of small rank determining the surface topology. This algorithm can be applied to smooth surfaces with or without boundary, embedded in an ambient space of any dimension.
Linear quadratic control of nonlinear systems with Koopman operator learning and the Nyström method
Mar 05, 2024In this paper, we study how the Koopman operator framework can be combined with kernel methods to effectively control nonlinear dynamical systems. While kernel methods have typically large computational requirements, we show how random subspaces (Nystr\"om approximation) can be used to achieve huge computational savings while preserving accuracy. Our main technical contribution is deriving theoretical guarantees on the effect of the Nystr\"om approximation. More precisely, we study the linear quadratic regulator problem, showing that both the approximated Riccati operator and the regulator objective, for the associated solution of the optimal control problem, converge at the rate $m^{-1/2}$, where $m$ is the random subspace size. Theoretical findings are complemented by numerical experiments corroborating our results.
Towards Transferring Tactile-based Continuous Force Control Policies from Simulation to Robot
Nov 13, 2023



The advent of tactile sensors in robotics has sparked many ideas on how robots can leverage direct contact measurements of their environment interactions to improve manipulation tasks. An important line of research in this regard is that of grasp force control, which aims to manipulate objects safely by limiting the amount of force exerted on the object. While prior works have either hand-modeled their force controllers, employed model-based approaches, or have not shown sim-to-real transfer, we propose a model-free deep reinforcement learning approach trained in simulation and then transferred to the robot without further fine-tuning. We therefore present a simulation environment that produces realistic normal forces, which we use to train continuous force control policies. An evaluation in which we compare against a baseline and perform an ablation study shows that our approach outperforms the hand-modeled baseline and that our proposed inductive bias and domain randomization facilitate sim-to-real transfer. Code, models, and supplementary videos are available on https://sites.google.com/view/rl-force-ctrl
Benchmarking the Sim-to-Real Gap in Cloth Manipulation
Oct 14, 2023Realistic physics engines play a crucial role for learning to manipulate deformable objects such as garments in simulation. By doing so, researchers can circumvent challenges such as sensing the deformation of the object in the real-world. In spite of the extensive use of simulations for this task, few works have evaluated the reality gap between deformable object simulators and real-world data. We present a benchmark dataset to evaluate the sim-to-real gap in cloth manipulation. The dataset is collected by performing a dynamic cloth manipulation task involving contact with a rigid table. We use the dataset to evaluate the reality gap, computational time, and simulation stability of four popular deformable object simulators: MuJoCo, Bullet, Flex, and SOFA. Additionally, we discuss the benefits and drawbacks of each simulator. The benchmark dataset is open-source. Supplementary material, videos, and code, can be found at https://sites.google.com/view/cloth-sim2real-benchmark.