 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurface reconstruction of sampled textiles via Morse theory
May 27, 2024In this work, we study the perception problem for garments using tools from computational topology: the identification of their geometry and position in space from point-cloud samples, as obtained e.g. with 3D scanners. We present a reconstruction algorithm based on a direct topological study of the sampled textile surface that allows us to obtain a cellular decomposition of it via a Morse function. No intermediate triangulation or local implicit equations are used, avoiding reconstruction-induced artifices. No a priori knowledge of the surface topology, density or regularity of the point-sample is required to run the algorithm. The results are a piecewise decomposition of the surface as a union of Morse cells (i.e. topological disks), suitable for tasks such as noise-filtering or mesh-independent reparametrization, and a cell complex of small rank determining the surface topology. This algorithm can be applied to smooth surfaces with or without boundary, embedded in an ambient space of any dimension.
A novel collision model for inextensible textiles and its experimental validation
Mar 25, 2023In this work, we introduce a collision model specifically tailored for the simulation of inextensible textiles. The model considers friction, contacts, and inextensibility constraints all at the same time without any decoupling. Self-collisions are modeled in a natural way that allows considering the thickness of cloth without introducing unwanted oscillations. The discretization of the equations of motion leads naturally to a sequence of quadratic problems with inequality and equality constraints. In order to solve these problems efficiently, we develop a novel active-set algorithm that takes into account past active constraints to accelerate the resolution of unresolved contacts. We put to a test the developed collision procedure with diverse scenarios involving static and dynamic friction, sharp objects, and complex-topology folding sequences. Finally, we perform an experimental validation of the collision model by comparing simulations with recordings of real textiles as given by a $\textit{Motion Capture System}$. The results are very accurate, having errors around 1 cm for DIN A2 textiles (42 x 59.4 cm) even in difficult scenarios involving fast and strong hits with a rigid object.
The dGLI Cloth Coordinates: A Topological Representation for Semantic Classification of Cloth States
Sep 14, 2022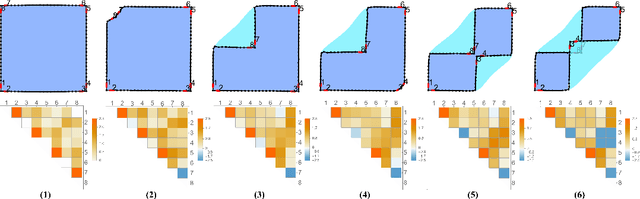
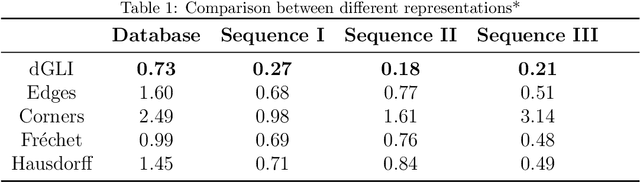
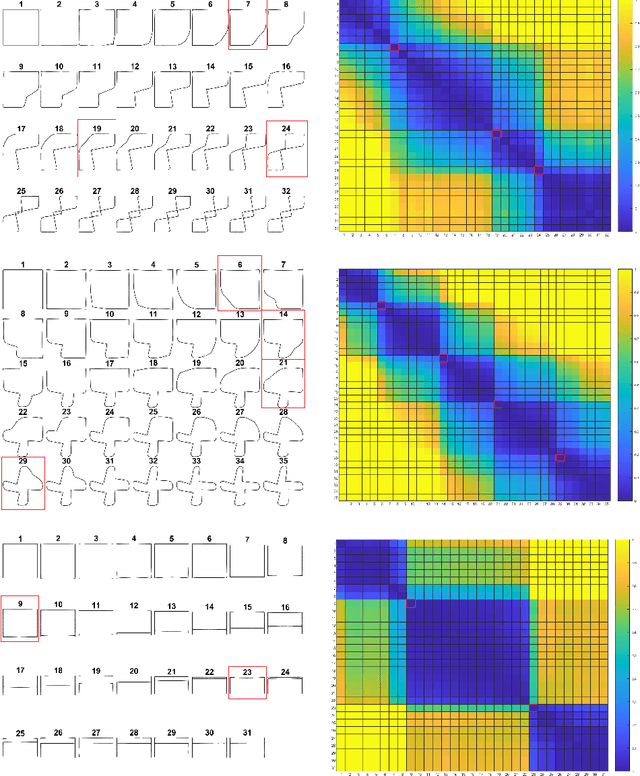
Robotic manipulation of cloth is a highly complex task because of its infinite-dimensional shape-state space that makes cloth state estimation very difficult. In this paper we introduce the dGLI Cloth Coordinates, a low-dimensional representation of the state of a rectangular piece of cloth that allows to efficiently distinguish key topological changes in a folding sequence, opening the door to efficient learning methods for cloth manipulation planning and control. Our representation is based on a directional derivative of the Gauss Linking Integral and allows us to represent both planar and spatial configurations in a consistent unified way. The proposed dGLI Cloth Coordinates are shown to be more accurate in the classification of cloth states and significantly more sensitive to changes in grasping affordances than other classic shape distance methods. Finally, we apply our representation to real images of a cloth, showing we can identify the different states using a simple distance-based classifier.
An Inextensible Model for Robotic Simulations of Textiles
Mar 17, 2021
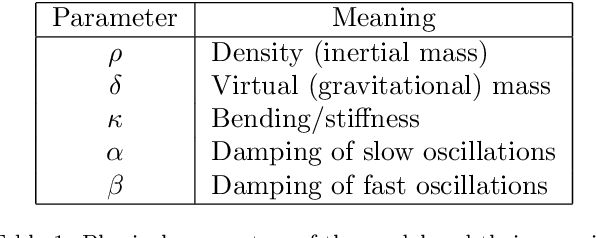
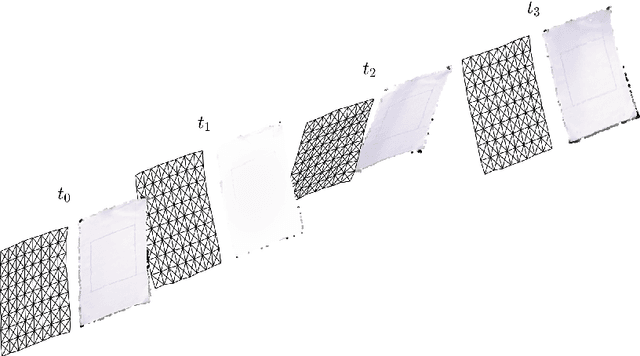
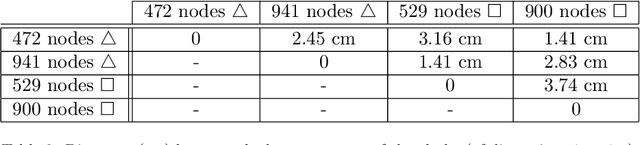
We introduce a new isometric strain model for the study of the dynamics of cloth garments in a moderate stress environment, such as robotic manipulation in the neighborhood of humans. This model treats textiles as surfaces which are inextensible, admitting only isometric motions. Inextensibility is imposed in a continuous setting, prior to any discretization, which gives consistency with respect to re-meshing and prevents the problem of locking even with coarse meshes. The simulations of robotic manipulation using the model are compared to the actual manipulation in the real world, finding that the error between the simulated and real position of each point in the garment is lower than 1cm in average, even when a coarse mesh is used. Aerodynamic contributions to motion are incorporated to the model through the virtual uncoupling of the inertial and gravitational mass of the garment. This approach results in an accurate, as compared to reality, description of cloth motion incorporating aerodynamic effects by using only two parameters.