 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Inextensible Model for Robotic Simulations of Textiles
Paper and Code
Mar 17, 2021
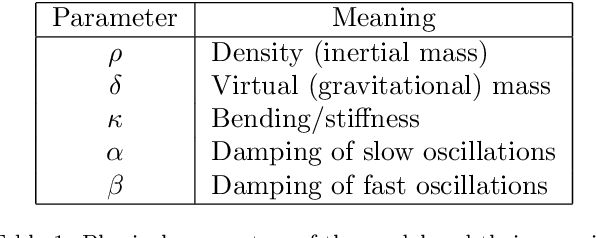
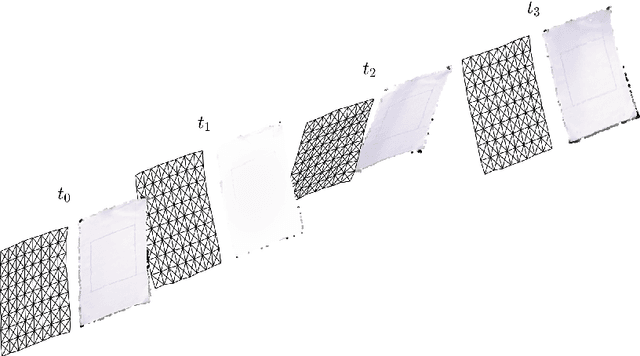
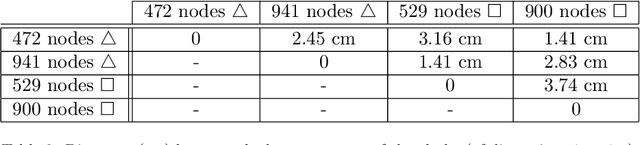
We introduce a new isometric strain model for the study of the dynamics of cloth garments in a moderate stress environment, such as robotic manipulation in the neighborhood of humans. This model treats textiles as surfaces which are inextensible, admitting only isometric motions. Inextensibility is imposed in a continuous setting, prior to any discretization, which gives consistency with respect to re-meshing and prevents the problem of locking even with coarse meshes. The simulations of robotic manipulation using the model are compared to the actual manipulation in the real world, finding that the error between the simulated and real position of each point in the garment is lower than 1cm in average, even when a coarse mesh is used. Aerodynamic contributions to motion are incorporated to the model through the virtual uncoupling of the inertial and gravitational mass of the garment. This approach results in an accurate, as compared to reality, description of cloth motion incorporating aerodynamic effects by using only two parameters.