 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe dGLI Cloth Coordinates: A Topological Representation for Semantic Classification of Cloth States
Paper and Code
Sep 14, 2022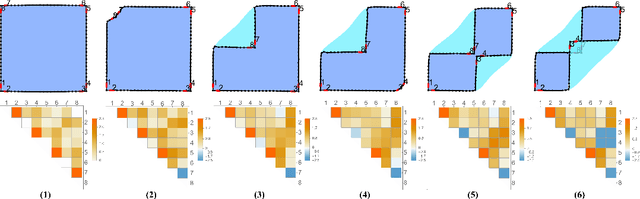
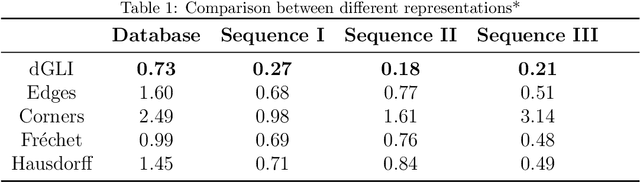
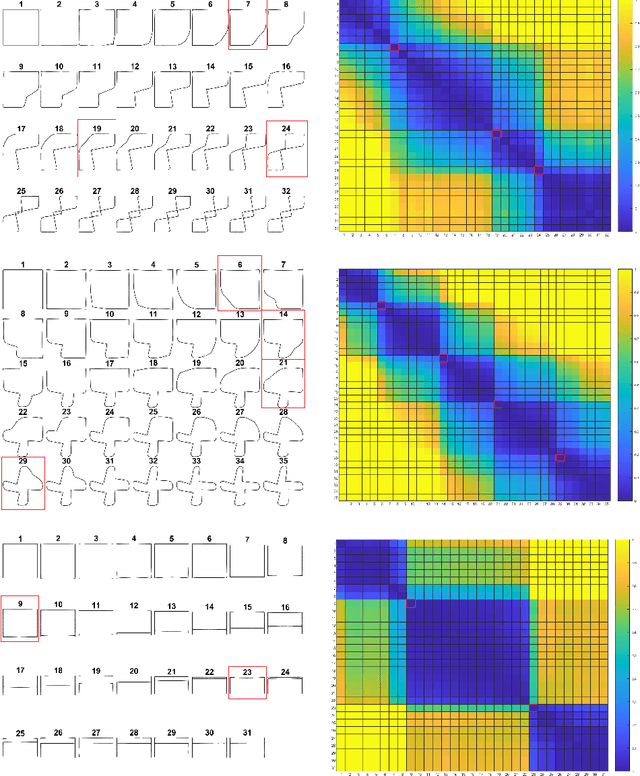
Robotic manipulation of cloth is a highly complex task because of its infinite-dimensional shape-state space that makes cloth state estimation very difficult. In this paper we introduce the dGLI Cloth Coordinates, a low-dimensional representation of the state of a rectangular piece of cloth that allows to efficiently distinguish key topological changes in a folding sequence, opening the door to efficient learning methods for cloth manipulation planning and control. Our representation is based on a directional derivative of the Gauss Linking Integral and allows us to represent both planar and spatial configurations in a consistent unified way. The proposed dGLI Cloth Coordinates are shown to be more accurate in the classification of cloth states and significantly more sensitive to changes in grasping affordances than other classic shape distance methods. Finally, we apply our representation to real images of a cloth, showing we can identify the different states using a simple distance-based classifier.