 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThreading the Needle: Test and Evaluation of Early Stage UAS Capabilities to Autonomously Navigate GPS-Denied Environments in the DARPA Fast Lightweight Autonomy (FLA) Program
Apr 10, 2025The DARPA Fast Lightweight Autonomy (FLA) program (2015 - 2018) served as a significant milestone in the development of UAS, particularly for autonomous navigation through unknown GPS-denied environments. Three performing teams developed UAS using a common hardware platform, focusing their contributions on autonomy algorithms and sensing. Several experiments were conducted that spanned indoor and outdoor environments, increasing in complexity over time. This paper reviews the testing methodology developed in order to benchmark and compare the performance of each team, each of the FLA Phase 1 experiments that were conducted, and a summary of the Phase 1 results.
Developing Modular Grasping and Manipulation Pipeline Infrastructure to Streamline Performance Benchmarking
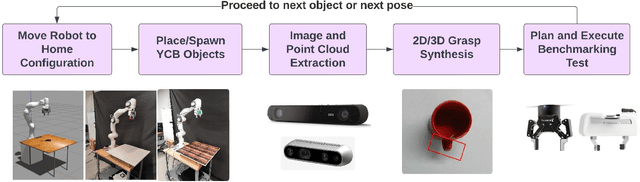
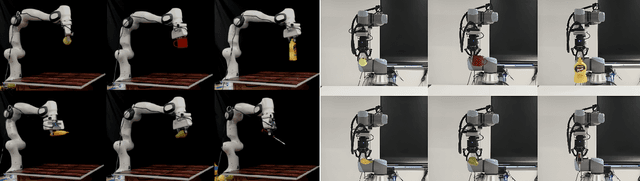
Apr 09, 2025The robot manipulation ecosystem currently faces issues with integrating open-source components and reproducing results. This limits the ability of the community to benchmark and compare the performance of different solutions to one another in an effective manner, instead relying on largely holistic evaluations. As part of the COMPARE Ecosystem project, we are developing modular grasping and manipulation pipeline infrastructure in order to streamline performance benchmarking. The infrastructure will be used towards the establishment of standards and guidelines for modularity and improved open-source development and benchmarking. This paper provides a high-level overview of the architecture of the pipeline infrastructure, experiments conducted to exercise it during development, and future work to expand its modularity.
A Benchmarking Study of Vision-based Robotic Grasping Algorithms
Mar 14, 2025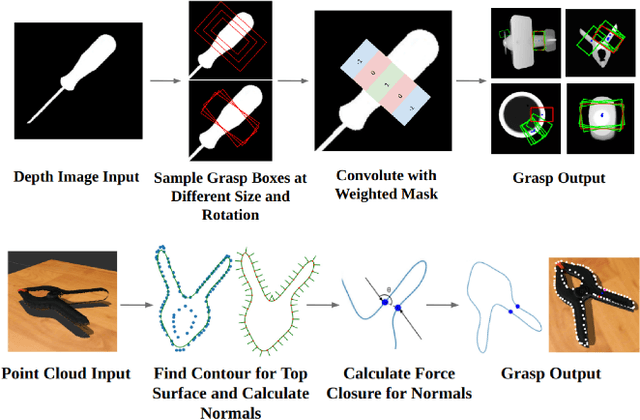

We present a benchmarking study of vision-based robotic grasping algorithms with distinct approaches, and provide a comparative analysis. In particular, we compare two machine-learning-based and two analytical algorithms using an existing benchmarking protocol from the literature and determine the algorithm's strengths and weaknesses under different experimental conditions. These conditions include variations in lighting, background textures, cameras with different noise levels, and grippers. We also run analogous experiments in simulations and with real robots and present the discrepancies. Some experiments are also run in two different laboratories using same protocols to further analyze the repeatability of our results. We believe that this study, comprising 5040 experiments, provides important insights into the role and challenges of systematic experimentation in robotic manipulation, and guides the development of new algorithms by considering the factors that could impact the performance. The experiment recordings and our benchmarking software are publicly available.
Towards an Efficient Synthetic Image Data Pipeline for Training Vision-Based Robot Systems
Nov 09, 2024
Training data is an essential resource for creating capable and robust vision systems which are integral to the proper function of many robotic systems. Synthesized training data has been shown in recent years to be a viable alternative to manually collecting and labelling data. In order to meet the rising popularity of synthetic image training data we propose a framework for defining synthetic image data pipelines. Additionally we survey the literature to identify the most promising candidates for components of the proposed pipeline. We propose that defining such a pipeline will be beneficial in reducing development cycles and coordinating future research.
Towards Using Multiple Iterated, Reproduced, and Replicated Experiments with Robots (MIRRER) for Evaluation and Benchmarking
Aug 08, 2024The robotics research field lacks formalized definitions and frameworks for evaluating advanced capabilities including generalizability (the ability for robots to perform tasks under varied contexts) and reproducibility (the performance of a reproduced robot capability in different labs under the same experimental conditions). This paper presents an initial conceptual framework, MIRRER, that unites the concepts of performance evaluation, benchmarking, and reproduced/replicated experimentation in order to facilitate comparable robotics research. Several open issues with the application of the framework are also presented.
DECISIVE Benchmarking Data Report: sUAS Performance Results from Phase I
Jan 20, 2023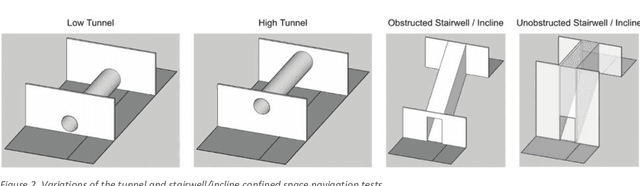
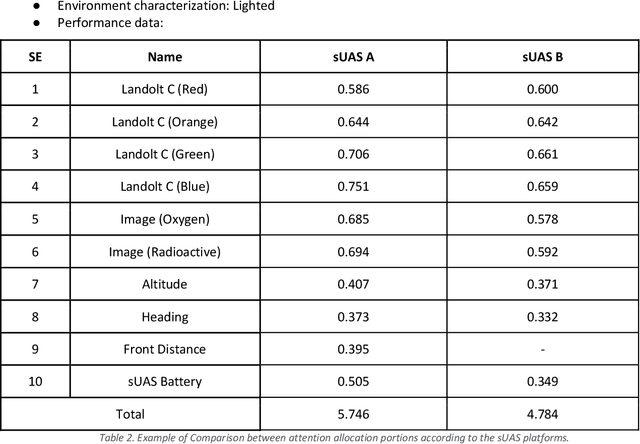
This report reviews all results derived from performance benchmarking conducted during Phase I of the Development and Execution of Comprehensive and Integrated Subterranean Intelligent Vehicle Evaluations (DECISIVE) project by the University of Massachusetts Lowell, using the test methods specified in the DECISIVE Test Methods Handbook v1.1 for evaluating small unmanned aerial systems (sUAS) performance in subterranean and constrained indoor environments, spanning communications, field readiness, interface, obstacle avoidance, navigation, mapping, autonomy, trust, and situation awareness. Using those 20 test methods, over 230 tests were conducted across 8 sUAS platforms: Cleo Robotics Dronut X1P (P = prototype), FLIR Black Hornet PRS, Flyability Elios 2 GOV, Lumenier Nighthawk V3, Parrot ANAFI USA GOV, Skydio X2D, Teal Golden Eagle, and Vantage Robotics Vesper. Best in class criteria is specified for each applicable test method and the sUAS that match this criteria are named for each test method, including a high-level executive summary of their performance.
Contextual Autonomy Evaluation of Unmanned Aerial Vehicles in Subterranean Environments
Jan 06, 2023


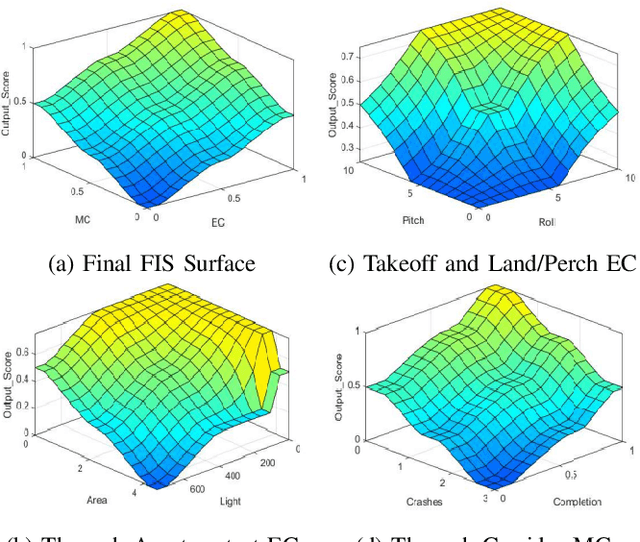
In this paper we focus on the evaluation of contextual autonomy for robots. More specifically, we propose a fuzzy framework for calculating the autonomy score for a small Unmanned Aerial Systems (sUAS) for performing a task while considering task complexity and environmental factors. Our framework is a cascaded Fuzzy Inference System (cFIS) composed of combination of three FIS which represent different contextual autonomy capabilities. We performed several experiments to test our framework in various contexts, such as endurance time, navigation, take off/land, and room clearing, with seven different sUAS. We introduce a predictive measure which improves upon previous predictive measures, allowing for previous real-world task performance to be used in predicting future mission performance.
DECISIVE Test Methods Handbook: Test Methods for Evaluating sUAS in Subterranean and Constrained Indoor Environments, Version 1.1
Nov 01, 2022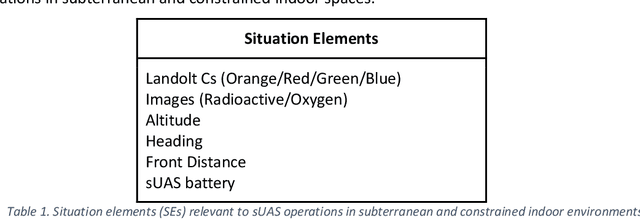
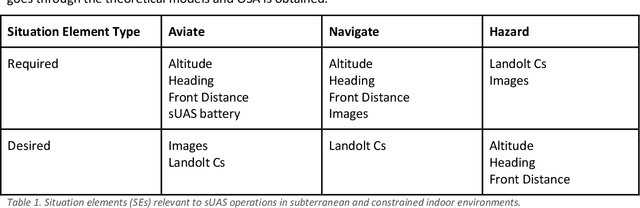
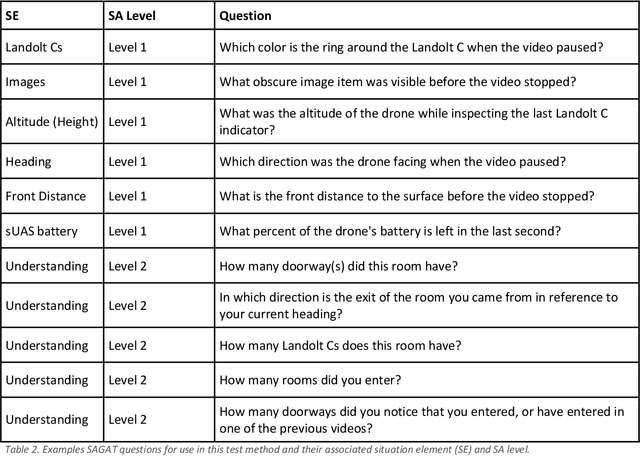
This handbook outlines all test methods developed under the Development and Execution of Comprehensive and Integrated Subterranean Intelligent Vehicle Evaluations (DECISIVE) project by the University of Massachusetts Lowell for evaluating small unmanned aerial systems (sUAS) performance in subterranean and constrained indoor environments, spanning communications, field readiness, interface, obstacle avoidance, navigation, mapping, autonomy, trust, and situation awareness. For sUAS deployment in subterranean and constrained indoor environments, this puts forth two assumptions about applicable sUAS to be evaluated using these test methods: (1) able to operate without access to GPS signal, and (2) width from prop top to prop tip does not exceed 91 cm (36 in) wide (i.e., can physically fit through a typical doorway, although successful navigation through is not guaranteed). All test methods are specified using a common format: Purpose, Summary of Test Method, Apparatus and Artifacts, Equipment, Metrics, Procedure, and Example Data. All test methods are designed to be run in real-world environments (e.g., MOUT sites) or using fabricated apparatuses (e.g., test bays built from wood, or contained inside of one or more shipping containers).
Household Cloth Object Set: Fostering Benchmarking in Deformable Object Manipulation
Nov 02, 2021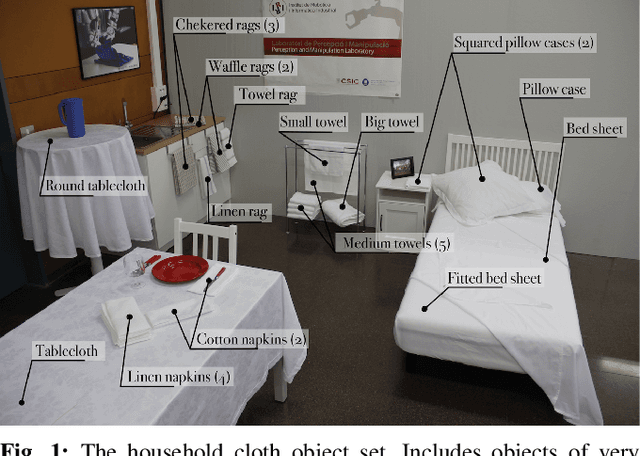
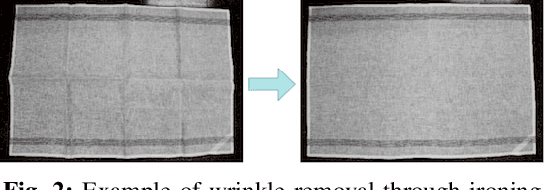
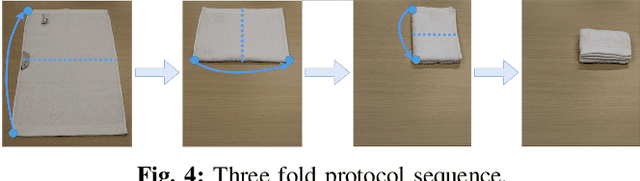
Benchmarking of robotic manipulations is one of the open issues in robotic research. An important factor that has enabled progress in this area in the last decade is the existence of common object sets that have been shared among different research groups. However, the existing object sets are very limited when it comes to cloth-like objects that have unique particularities and challenges. This paper is a first step towards the design of a cloth object set to be distributed among research groups from the robotics cloth manipulation community. We present a set of household cloth objects and related tasks that serve to expose the challenges related to gathering such an object set and propose a roadmap to the design of common benchmarks in cloth manipulation tasks, with the intention to set the grounds for a future debate in the community that will be necessary to foster benchmarking for the manipulation of cloth-like objects. Some RGB-D and object scans are also collected as examples for the objects in relevant configurations. More details about the cloth set are shared in http://www.iri.upc.edu/groups/perception/ClothObjectSet/HouseholdClothSet.html.
Investigation of Multiple Resource Theory Design Principles on Robot Teleoperation and Workload Management
Mar 31, 2021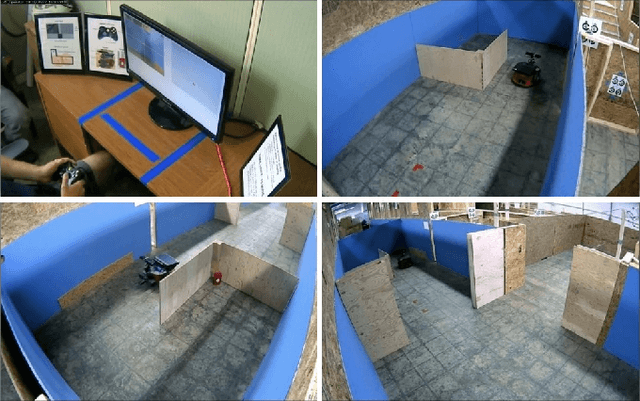
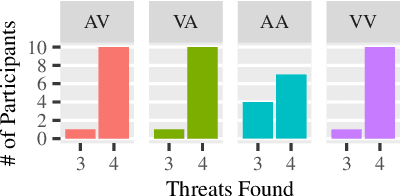
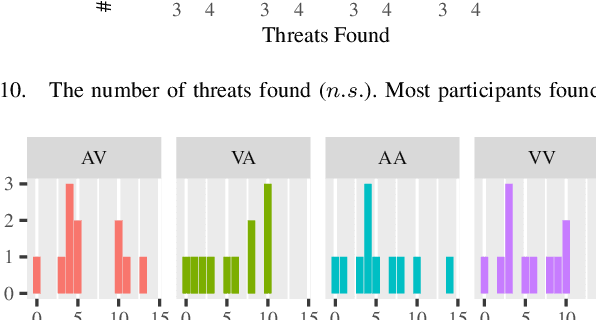
Robot interfaces often only use the visual channel. Inspired by Wickens' Multiple Resource Theory, we investigated if the addition of audio elements would reduce cognitive workload and improve performance. Specifically, we designed a search and threat-defusal task (primary) with a memory test task (secondary). Eleven participants - predominantly first responders - were recruited to control a robot to clear all threats in a combination of four conditions of primary and secondary tasks in visual and auditory channels. We did not find any statistically significant differences in performance or workload across subjects, making it questionable that Multiple Resource Theory could shorten longer-term task completion time and reduce workload. Our results suggest that considering individual differences for splitting interface modalities across multiple channels requires further investigation.