 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRaBiT: Residual-Aware Binarization Training for Accurate and Efficient LLMs
Feb 05, 2026Efficient deployment of large language models (LLMs) requires extreme quantization, forcing a critical trade-off between low-bit efficiency and performance. Residual binarization enables hardware-friendly, matmul-free inference by stacking binary ($\pm$1) layers, but is plagued by pathological feature co-adaptation. We identify a key failure mode, which we term inter-path adaptation: during quantization-aware training (QAT), parallel residual binary paths learn redundant features, degrading the error-compensation structure and limiting the expressive capacity of the model. While prior work relies on heuristic workarounds (e.g., path freezing) that constrain the solution space, we propose RaBiT, a novel quantization framework that resolves co-adaptation by algorithmically enforcing a residual hierarchy. Its core mechanism sequentially derives each binary path from a single shared full-precision weight, which ensures that every path corrects the error of the preceding one. This process is stabilized by a robust initialization that prioritizes functional preservation over mere weight approximation. RaBiT redefines the 2-bit accuracy-efficiency frontier: it achieves state-of-the-art performance, rivals even hardware-intensive Vector Quantization (VQ) methods, and delivers a $4.49\times$ inference speed-up over full-precision models on an RTX 4090.
DECISIVE Benchmarking Data Report: sUAS Performance Results from Phase I
Jan 20, 2023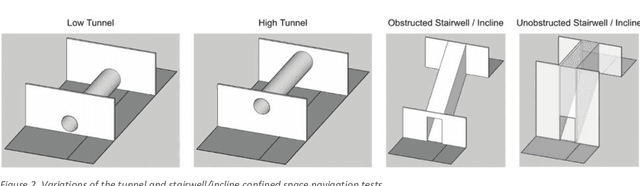
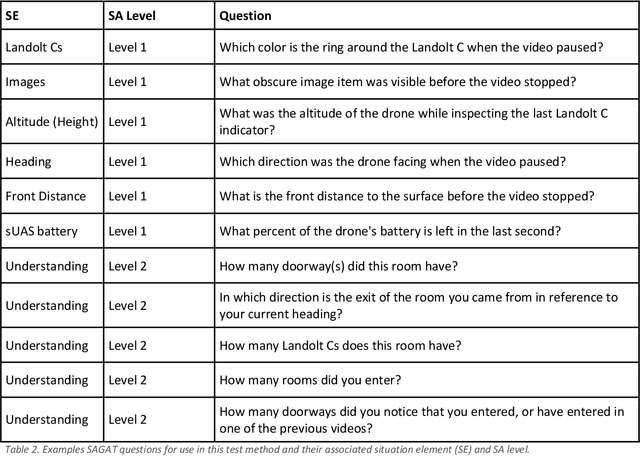
This report reviews all results derived from performance benchmarking conducted during Phase I of the Development and Execution of Comprehensive and Integrated Subterranean Intelligent Vehicle Evaluations (DECISIVE) project by the University of Massachusetts Lowell, using the test methods specified in the DECISIVE Test Methods Handbook v1.1 for evaluating small unmanned aerial systems (sUAS) performance in subterranean and constrained indoor environments, spanning communications, field readiness, interface, obstacle avoidance, navigation, mapping, autonomy, trust, and situation awareness. Using those 20 test methods, over 230 tests were conducted across 8 sUAS platforms: Cleo Robotics Dronut X1P (P = prototype), FLIR Black Hornet PRS, Flyability Elios 2 GOV, Lumenier Nighthawk V3, Parrot ANAFI USA GOV, Skydio X2D, Teal Golden Eagle, and Vantage Robotics Vesper. Best in class criteria is specified for each applicable test method and the sUAS that match this criteria are named for each test method, including a high-level executive summary of their performance.
DECISIVE Test Methods Handbook: Test Methods for Evaluating sUAS in Subterranean and Constrained Indoor Environments, Version 1.1
Nov 01, 2022
This handbook outlines all test methods developed under the Development and Execution of Comprehensive and Integrated Subterranean Intelligent Vehicle Evaluations (DECISIVE) project by the University of Massachusetts Lowell for evaluating small unmanned aerial systems (sUAS) performance in subterranean and constrained indoor environments, spanning communications, field readiness, interface, obstacle avoidance, navigation, mapping, autonomy, trust, and situation awareness. For sUAS deployment in subterranean and constrained indoor environments, this puts forth two assumptions about applicable sUAS to be evaluated using these test methods: (1) able to operate without access to GPS signal, and (2) width from prop top to prop tip does not exceed 91 cm (36 in) wide (i.e., can physically fit through a typical doorway, although successful navigation through is not guaranteed). All test methods are specified using a common format: Purpose, Summary of Test Method, Apparatus and Artifacts, Equipment, Metrics, Procedure, and Example Data. All test methods are designed to be run in real-world environments (e.g., MOUT sites) or using fabricated apparatuses (e.g., test bays built from wood, or contained inside of one or more shipping containers).