 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelational Q-Functionals: Multi-Agent Learning to Recover from Unforeseen Robot Malfunctions in Continuous Action Domains
Jul 27, 2024



Cooperative multi-agent learning methods are essential in developing effective cooperation strategies in multi-agent domains. In robotics, these methods extend beyond multi-robot scenarios to single-robot systems, where they enable coordination among different robot modules (e.g., robot legs or joints). However, current methods often struggle to quickly adapt to unforeseen failures, such as a malfunctioning robot leg, especially after the algorithm has converged to a strategy. To overcome this, we introduce the Relational Q-Functionals (RQF) framework. RQF leverages a relational network, representing agents' relationships, to enhance adaptability, providing resilience against malfunction(s). Our algorithm also efficiently handles continuous state-action domains, making it adept for robotic learning tasks. Our empirical results show that RQF enables agents to use these relationships effectively to facilitate cooperation and recover from an unexpected malfunction in single-robot systems with multiple interacting modules. Thus, our approach offers promising applications in multi-agent systems, particularly in scenarios with unforeseen malfunctions.
Energy-Guided Data Sampling for Traffic Prediction with Mini Training Datasets
Apr 01, 2024Recent endeavors aimed at forecasting future traffic flow states through deep learning encounter various challenges and yield diverse outcomes. A notable obstacle arises from the substantial data requirements of deep learning models, a resource often scarce in traffic flow systems. Despite the abundance of domain knowledge concerning traffic flow dynamics, prevailing deep learning methodologies frequently fail to fully exploit it. To address these issues, we propose an innovative solution that merges Convolutional Neural Networks (CNNs) with Long Short-Term Memory (LSTM) architecture to enhance the prediction of traffic flow dynamics. A key revelation of our research is the feasibility of sampling training data for large traffic systems from simulations conducted on smaller traffic systems. This insight suggests the potential for referencing a macroscopic-level distribution to inform the sampling of microscopic data. Such sampling is facilitated by the observed scale invariance in the normalized energy distribution of the statistical mechanics model, thereby streamlining the data generation process for large-scale traffic systems. Our simulations demonstrate promising agreement between predicted and actual traffic flow dynamics, underscoring the efficacy of our proposed approach.
Iterative Forgetting: Online Data Stream Regression Using Database-Inspired Adaptive Granulation
Mar 14, 2024Many modern systems, such as financial, transportation, and telecommunications systems, are time-sensitive in the sense that they demand low-latency predictions for real-time decision-making. Such systems often have to contend with continuous unbounded data streams as well as concept drift, which are challenging requirements that traditional regression techniques are unable to cater to. There exists a need to create novel data stream regression methods that can handle these scenarios. We present a database-inspired datastream regression model that (a) uses inspiration from R*-trees to create granules from incoming datastreams such that relevant information is retained, (b) iteratively forgets granules whose information is deemed to be outdated, thus maintaining a list of only recent, relevant granules, and (c) uses the recent data and granules to provide low-latency predictions. The R*-tree-inspired approach also makes the algorithm amenable to integration with database systems. Our experiments demonstrate that the ability of this method to discard data produces a significant order-of-magnitude improvement in latency and training time when evaluated against the most accurate state-of-the-art algorithms, while the R*-tree-inspired granulation technique provides competitively accurate predictions
Human-guided Swarms: Impedance Control-inspired Influence in Virtual Reality Environments
Feb 06, 2024Prior works in human-swarm interaction (HSI) have sought to guide swarm behavior towards established objectives, but may be unable to handle specific scenarios that require finer human supervision, variable autonomy, or application to large-scale swarms. In this paper, we present an approach that enables human supervisors to tune the level of swarm control, and guide a large swarm using an assistive control mechanism that does not significantly restrict emergent swarm behaviors. We develop this approach in a virtual reality (VR) environment, using the HTC Vive and Unreal Engine 4 with AirSim plugin. The novel combination of an impedance control-inspired influence mechanism and a VR test bed enables and facilitates the rapid design and test iterations to examine trade-offs between swarming behavior and macroscopic-scale human influence, while circumventing flight duration limitations associated with battery-powered small unmanned aerial system (sUAS) systems. The impedance control-inspired mechanism was tested by a human supervisor to guide a virtual swarm consisting of 16 sUAS agents. Each test involved moving the swarm's center of mass through narrow canyons, which were not feasible for a swarm to traverse autonomously. Results demonstrate that integration of the influence mechanism enabled the successful manipulation of the macro-scale behavior of the swarm towards task completion, while maintaining the innate swarming behavior.
Influence of Team Interactions on Multi-Robot Cooperation: A Relational Network Perspective
Oct 19, 2023



Relational networks within a team play a critical role in the performance of many real-world multi-robot systems. To successfully accomplish tasks that require cooperation and coordination, different agents (e.g., robots) necessitate different priorities based on their positioning within the team. Yet, many of the existing multi-robot cooperation algorithms regard agents as interchangeable and lack a mechanism to guide the type of cooperation strategy the agents should exhibit. To account for the team structure in cooperative tasks, we propose a novel algorithm that uses a relational network comprising inter-agent relationships to prioritize certain agents over others. Through appropriate design of the team's relational network, we can guide the cooperation strategy, resulting in the emergence of new behaviors that accomplish the specified task. We conducted six experiments in a multi-robot setting with a cooperative task. Our results demonstrate that the proposed method can effectively influence the type of solution that the algorithm converges to by specifying the relationships between the agents, making it a promising approach for tasks that require cooperation among agents with a specified team structure.
Collaborative Adaptation: Learning to Recover from Unforeseen Malfunctions in Multi-Robot Teams
Oct 19, 2023



Cooperative multi-agent reinforcement learning (MARL) approaches tackle the challenge of finding effective multi-agent cooperation strategies for accomplishing individual or shared objectives in multi-agent teams. In real-world scenarios, however, agents may encounter unforeseen failures due to constraints like battery depletion or mechanical issues. Existing state-of-the-art methods in MARL often recover slowly -- if at all -- from such malfunctions once agents have already converged on a cooperation strategy. To address this gap, we present the Collaborative Adaptation (CA) framework. CA introduces a mechanism that guides collaboration and accelerates adaptation from unforeseen failures by leveraging inter-agent relationships. Our findings demonstrate that CA enables agents to act on the knowledge of inter-agent relations, recovering from unforeseen agent failures and selecting appropriate cooperative strategies.
Impact of Relational Networks in Multi-Agent Learning: A Value-Based Factorization View
Oct 19, 2023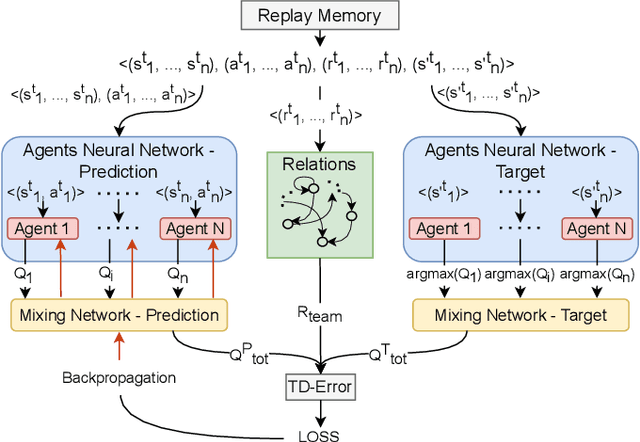
Effective coordination and cooperation among agents are crucial for accomplishing individual or shared objectives in multi-agent systems. In many real-world multi-agent systems, agents possess varying abilities and constraints, making it necessary to prioritize agents based on their specific properties to ensure successful coordination and cooperation within the team. However, most existing cooperative multi-agent algorithms do not take into account these individual differences, and lack an effective mechanism to guide coordination strategies. We propose a novel multi-agent learning approach that incorporates relationship awareness into value-based factorization methods. Given a relational network, our approach utilizes inter-agents relationships to discover new team behaviors by prioritizing certain agents over other, accounting for differences between them in cooperative tasks. We evaluated the effectiveness of our proposed approach by conducting fifteen experiments in two different environments. The results demonstrate that our proposed algorithm can influence and shape team behavior, guide cooperation strategies, and expedite agent learning. Therefore, our approach shows promise for use in multi-agent systems, especially when agents have diverse properties.
A Multi-Robot Task Assignment Framework for Search and Rescue with Heterogeneous Teams
Sep 22, 2023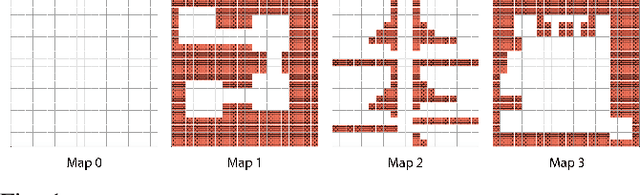
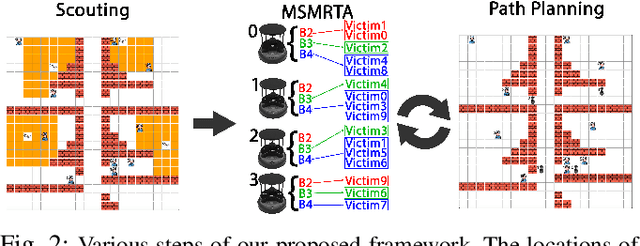
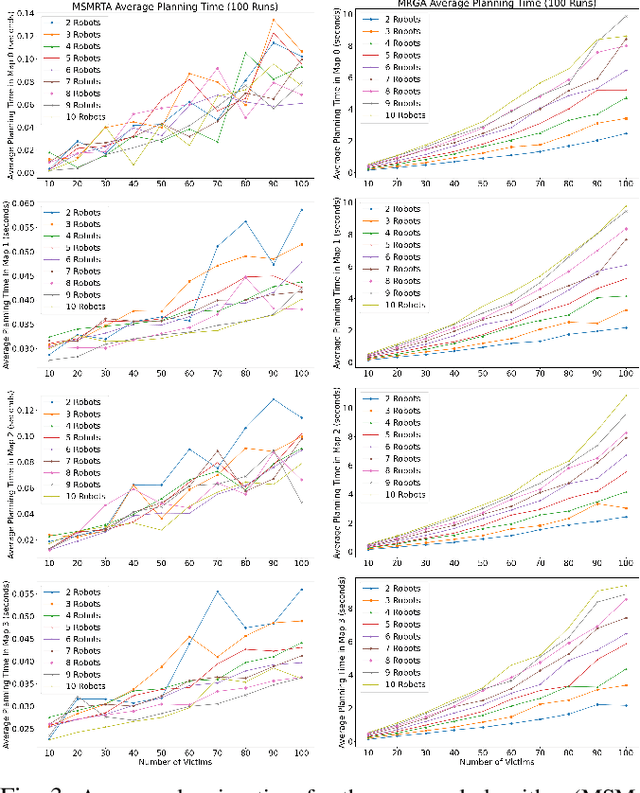
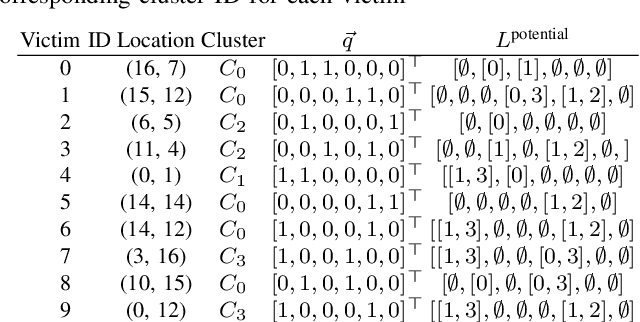
In post-disaster scenarios, efficient search and rescue operations involve collaborative efforts between robots and humans. Existing planning approaches focus on specific aspects but overlook crucial elements like information gathering, task assignment, and planning. Furthermore, previous methods considering robot capabilities and victim requirements suffer from time complexity due to repetitive planning steps. To overcome these challenges, we introduce a comprehensive framework__the Multi-Stage Multi-Robot Task Assignment. This framework integrates scouting, task assignment, and path-planning stages, optimizing task allocation based on robot capabilities, victim requirements, and past robot performance. Our iterative approach ensures objective fulfillment within problem constraints. Evaluation across four maps, comparing with a state-of-the-art baseline, demonstrates our algorithm's superiority with a remarkable 97 percent performance increase. Our code is open-sourced to enable result replication.
Thermodynamics-inspired Macroscopic States of Bounded Swarms
Aug 29, 2023The collective behavior of swarms is extremely difficult to estimate or predict, even when the local agent rules are known and simple. The presented work seeks to leverage the similarities between fluids and swarm systems to generate a thermodynamics-inspired characterization of the collective behavior of robotic swarms. While prior works have borrowed tools from fluid dynamics to design swarming behaviors, they have usually avoided the task of generating a fluids-inspired macroscopic state (or macrostate) description of the swarm. This work will bridge the gap by seeking to answer the following question: is it possible to generate a small set of thermodynamics-inspired macroscopic properties that may later be used to quantify all possible collective behaviors of swarm systems? In this paper, we present three macroscopic properties analogous to pressure, temperature, and density of a gas, to describe the behavior of a swarm that is governed by only attractive and repulsive agent interactions. These properties are made to satisfy an equation similar to the ideal gas law, and also generalized to satisfy the virial equation of state for real gases. Finally, we investigate how swarm specifications such as density and average agent velocity affect the system macrostate.
DECISIVE Benchmarking Data Report: sUAS Performance Results from Phase I
Jan 20, 2023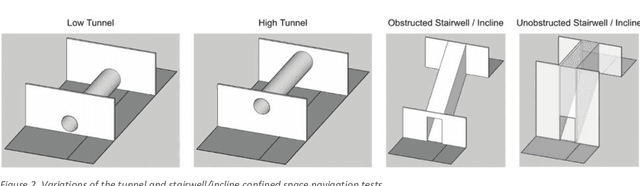
This report reviews all results derived from performance benchmarking conducted during Phase I of the Development and Execution of Comprehensive and Integrated Subterranean Intelligent Vehicle Evaluations (DECISIVE) project by the University of Massachusetts Lowell, using the test methods specified in the DECISIVE Test Methods Handbook v1.1 for evaluating small unmanned aerial systems (sUAS) performance in subterranean and constrained indoor environments, spanning communications, field readiness, interface, obstacle avoidance, navigation, mapping, autonomy, trust, and situation awareness. Using those 20 test methods, over 230 tests were conducted across 8 sUAS platforms: Cleo Robotics Dronut X1P (P = prototype), FLIR Black Hornet PRS, Flyability Elios 2 GOV, Lumenier Nighthawk V3, Parrot ANAFI USA GOV, Skydio X2D, Teal Golden Eagle, and Vantage Robotics Vesper. Best in class criteria is specified for each applicable test method and the sUAS that match this criteria are named for each test method, including a high-level executive summary of their performance.