 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigating the Generalizability of Assistive Robots Models over Various Tasks
May 03, 2024



In the domain of assistive robotics, the significance of effective modeling is well acknowledged. Prior research has primarily focused on enhancing model accuracy or involved the collection of extensive, often impractical amounts of data. While improving individual model accuracy is beneficial, it necessitates constant remodeling for each new task and user interaction. In this paper, we investigate the generalizability of different modeling methods. We focus on constructing the dynamic model of an assistive exoskeleton using six data-driven regression algorithms. Six tasks are considered in our experiments, including horizontal, vertical, diagonal from left leg to the right eye and the opposite, as well as eating and pushing. We constructed thirty-six unique models applying different regression methods to data gathered from each task. Each trained model's performance was evaluated in a cross-validation scenario, utilizing five folds for each dataset. These trained models are then tested on the other tasks that the model is not trained with. Finally the models in our study are assessed in terms of generalizability. Results show the superior generalizability of the task model performed along the horizontal plane, and decision tree based algorithms.
Design of Fuzzy Logic Parameter Tuners for Upper-Limb Assistive Robots
May 03, 2024Assistive Exoskeleton Robots are helping restore functions to people suffering from underlying medical conditions. These robots require precise tuning of hyper-parameters to feel natural to the user. The device hyper-parameters often need to be re-tuned from task to task, which can be tedious and require expert knowledge. To address this issue, we develop a set of fuzzy logic controllers that can dynamically tune robot gain parameters to adapt its sensitivity to the user's intention determined from muscle activation. The designed fuzzy controllers benefit from a set of expert-defined rules and do not rely on extensive amounts of training data. We evaluate the designed controllers with three different tasks and compare our results against the manually tuned system. Our preliminary results show that our controllers reduce the amount of fighting between the device and the human, measured using a set of pressure sensors.
Influence of Team Interactions on Multi-Robot Cooperation: A Relational Network Perspective
Oct 19, 2023



Relational networks within a team play a critical role in the performance of many real-world multi-robot systems. To successfully accomplish tasks that require cooperation and coordination, different agents (e.g., robots) necessitate different priorities based on their positioning within the team. Yet, many of the existing multi-robot cooperation algorithms regard agents as interchangeable and lack a mechanism to guide the type of cooperation strategy the agents should exhibit. To account for the team structure in cooperative tasks, we propose a novel algorithm that uses a relational network comprising inter-agent relationships to prioritize certain agents over others. Through appropriate design of the team's relational network, we can guide the cooperation strategy, resulting in the emergence of new behaviors that accomplish the specified task. We conducted six experiments in a multi-robot setting with a cooperative task. Our results demonstrate that the proposed method can effectively influence the type of solution that the algorithm converges to by specifying the relationships between the agents, making it a promising approach for tasks that require cooperation among agents with a specified team structure.
A Multi-Robot Task Assignment Framework for Search and Rescue with Heterogeneous Teams
Sep 22, 2023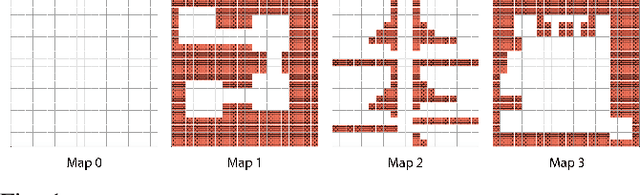
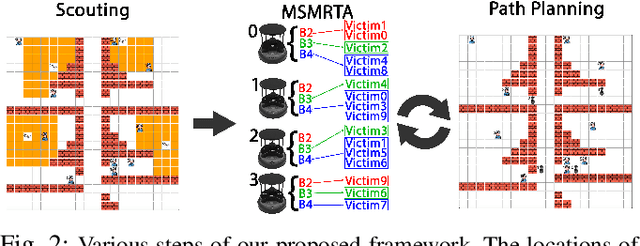
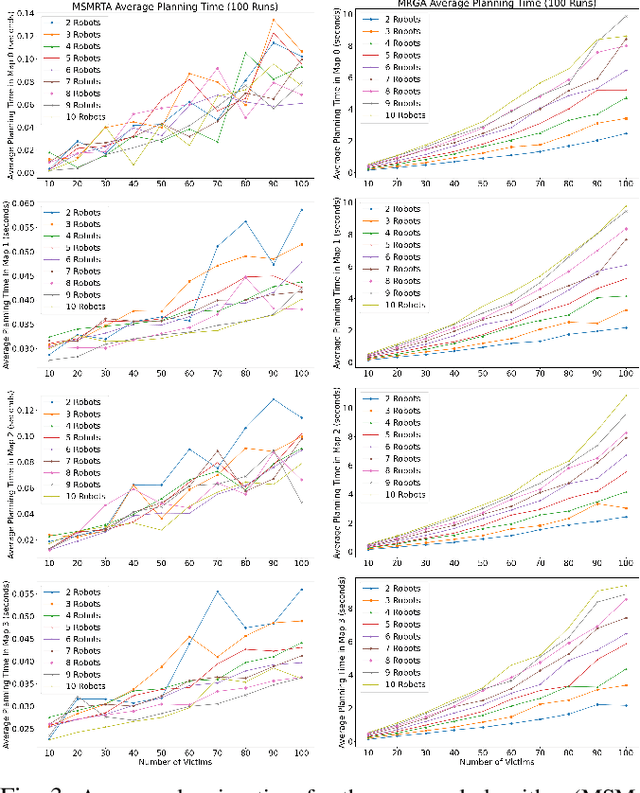
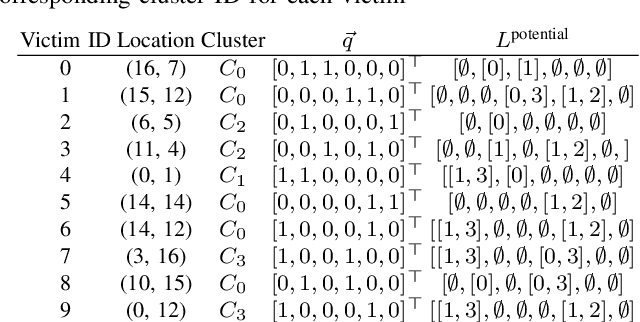
In post-disaster scenarios, efficient search and rescue operations involve collaborative efforts between robots and humans. Existing planning approaches focus on specific aspects but overlook crucial elements like information gathering, task assignment, and planning. Furthermore, previous methods considering robot capabilities and victim requirements suffer from time complexity due to repetitive planning steps. To overcome these challenges, we introduce a comprehensive framework__the Multi-Stage Multi-Robot Task Assignment. This framework integrates scouting, task assignment, and path-planning stages, optimizing task allocation based on robot capabilities, victim requirements, and past robot performance. Our iterative approach ensures objective fulfillment within problem constraints. Evaluation across four maps, comparing with a state-of-the-art baseline, demonstrates our algorithm's superiority with a remarkable 97 percent performance increase. Our code is open-sourced to enable result replication.
Design and Evaluation of a Bioinspired Tendon-Driven 3D-Printed Robotic Eye with Active Vision Capabilities
May 01, 2023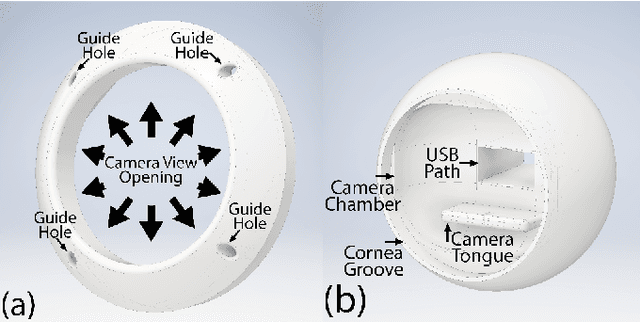

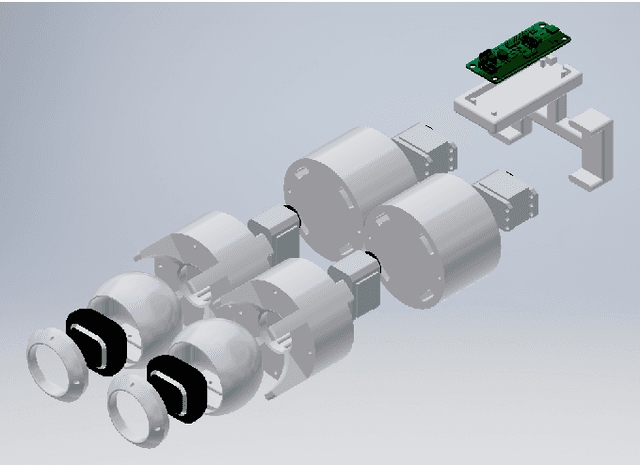
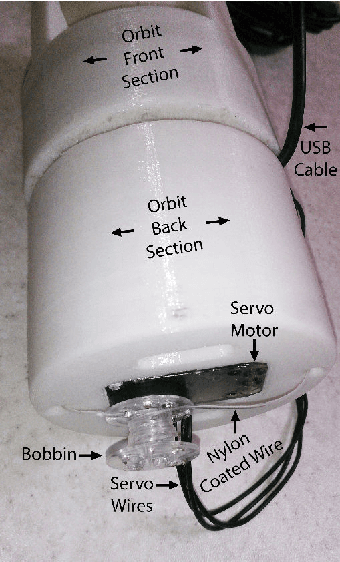
The field of robotics has seen significant advancements in recent years, particularly in the development of humanoid robots. One area of research that has yet to be fully explored is the design of robotic eyes. In this paper, we propose a computer-aided 3D design scheme for a robotic eye that incorporates realistic appearance, natural movements, and efficient actuation. The proposed design utilizes a tendon-driven actuation mechanism, which offers a broad range of motion capabilities. The use of the minimum number of servos for actuation, one for each agonist-antagonist pair of muscles, makes the proposed design highly efficient. Compared to existing ones in the same class, our designed robotic eye comprises aesthetic and realistic features. We evaluate the robot's performance using a vision-based controller, which demonstrates the effectiveness of the proposed design in achieving natural movement, and efficient actuation. The experiment code, toolbox, and printable 3D sketches of our design have been open-sourced.