 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnfolding the Literature: A Review of Robotic Cloth Manipulation
Jul 01, 2024



The realm of textiles spans clothing, households, healthcare, sports, and industrial applications. The deformable nature of these objects poses unique challenges that prior work on rigid objects cannot fully address. The increasing interest within the community in textile perception and manipulation has led to new methods that aim to address challenges in modeling, perception, and control, resulting in significant progress. However, this progress is often tailored to one specific textile or a subcategory of these textiles. To understand what restricts these methods and hinders current approaches from generalizing to a broader range of real-world textiles, this review provides an overview of the field, focusing specifically on how and to what extent textile variations are addressed in modeling, perception, benchmarking, and manipulation of textiles. We finally conclude by identifying key open problems and outlining grand challenges that will drive future advancements in the field.
Standardization of Cloth Objects and its Relevance in Robotic Manipulation
Mar 07, 2024The field of robotics faces inherent challenges in manipulating deformable objects, particularly in understanding and standardising fabric properties like elasticity, stiffness, and friction. While the significance of these properties is evident in the realm of cloth manipulation, accurately categorising and comprehending them in real-world applications remains elusive. This study sets out to address two primary objectives: (1) to provide a framework suitable for robotics applications to characterise cloth objects, and (2) to study how these properties influence robotic manipulation tasks. Our preliminary results validate the framework's ability to characterise cloth properties and compare cloth sets, and reveal the influence that different properties have on the outcome of five manipulation primitives. We believe that, in general, results on the manipulation of clothes should be reported along with a better description of the garments used in the evaluation. This paper proposes a set of these measures.
* 2024 ICRA International Conference on Robotics and Automation (ICRA)
Household Cloth Object Set: Fostering Benchmarking in Deformable Object Manipulation
Nov 02, 2021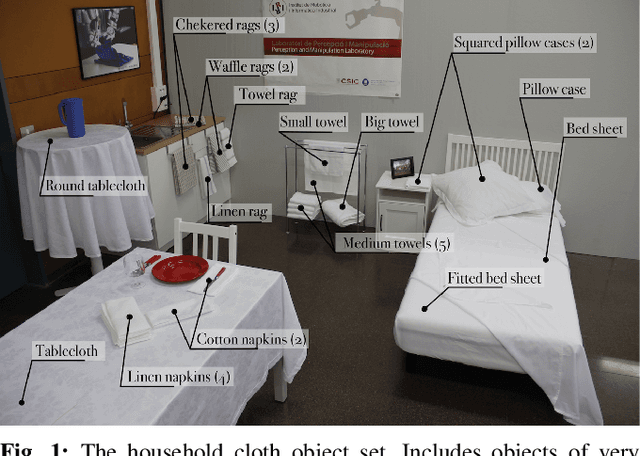
Benchmarking of robotic manipulations is one of the open issues in robotic research. An important factor that has enabled progress in this area in the last decade is the existence of common object sets that have been shared among different research groups. However, the existing object sets are very limited when it comes to cloth-like objects that have unique particularities and challenges. This paper is a first step towards the design of a cloth object set to be distributed among research groups from the robotics cloth manipulation community. We present a set of household cloth objects and related tasks that serve to expose the challenges related to gathering such an object set and propose a roadmap to the design of common benchmarks in cloth manipulation tasks, with the intention to set the grounds for a future debate in the community that will be necessary to foster benchmarking for the manipulation of cloth-like objects. Some RGB-D and object scans are also collected as examples for the objects in relevant configurations. More details about the cloth set are shared in http://www.iri.upc.edu/groups/perception/ClothObjectSet/HouseholdClothSet.html.