 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards an Efficient Synthetic Image Data Pipeline for Training Vision-Based Robot Systems
Nov 09, 2024Training data is an essential resource for creating capable and robust vision systems which are integral to the proper function of many robotic systems. Synthesized training data has been shown in recent years to be a viable alternative to manually collecting and labelling data. In order to meet the rising popularity of synthetic image training data we propose a framework for defining synthetic image data pipelines. Additionally we survey the literature to identify the most promising candidates for components of the proposed pipeline. We propose that defining such a pipeline will be beneficial in reducing development cycles and coordinating future research.
DECISIVE Benchmarking Data Report: sUAS Performance Results from Phase I
Jan 20, 2023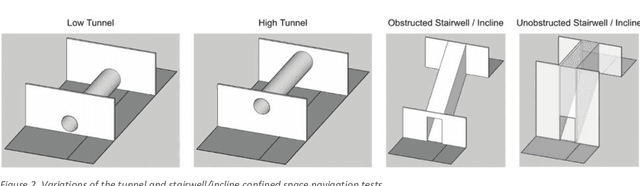
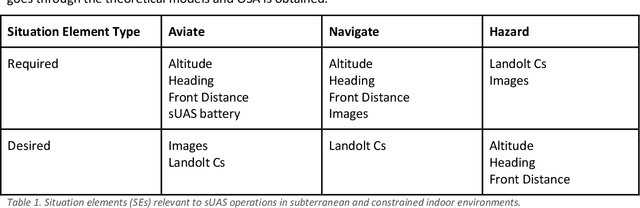
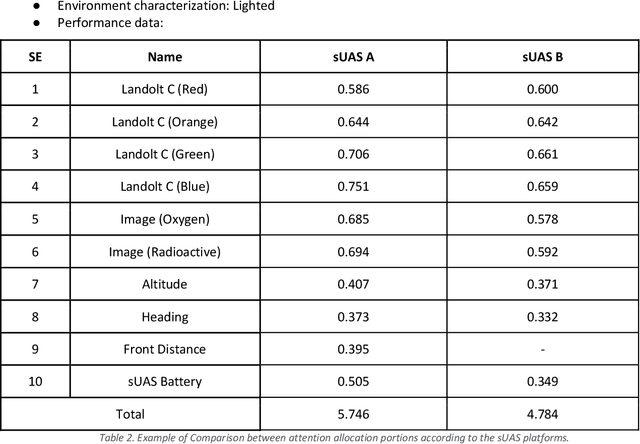
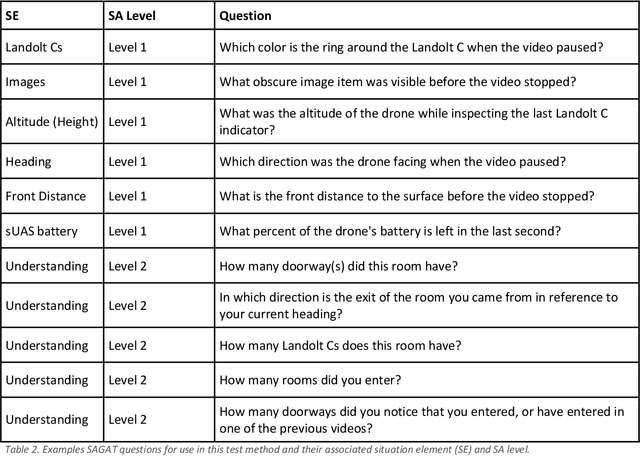
This report reviews all results derived from performance benchmarking conducted during Phase I of the Development and Execution of Comprehensive and Integrated Subterranean Intelligent Vehicle Evaluations (DECISIVE) project by the University of Massachusetts Lowell, using the test methods specified in the DECISIVE Test Methods Handbook v1.1 for evaluating small unmanned aerial systems (sUAS) performance in subterranean and constrained indoor environments, spanning communications, field readiness, interface, obstacle avoidance, navigation, mapping, autonomy, trust, and situation awareness. Using those 20 test methods, over 230 tests were conducted across 8 sUAS platforms: Cleo Robotics Dronut X1P (P = prototype), FLIR Black Hornet PRS, Flyability Elios 2 GOV, Lumenier Nighthawk V3, Parrot ANAFI USA GOV, Skydio X2D, Teal Golden Eagle, and Vantage Robotics Vesper. Best in class criteria is specified for each applicable test method and the sUAS that match this criteria are named for each test method, including a high-level executive summary of their performance.
Contextual Autonomy Evaluation of Unmanned Aerial Vehicles in Subterranean Environments
Jan 06, 2023In this paper we focus on the evaluation of contextual autonomy for robots. More specifically, we propose a fuzzy framework for calculating the autonomy score for a small Unmanned Aerial Systems (sUAS) for performing a task while considering task complexity and environmental factors. Our framework is a cascaded Fuzzy Inference System (cFIS) composed of combination of three FIS which represent different contextual autonomy capabilities. We performed several experiments to test our framework in various contexts, such as endurance time, navigation, take off/land, and room clearing, with seven different sUAS. We introduce a predictive measure which improves upon previous predictive measures, allowing for previous real-world task performance to be used in predicting future mission performance.
DECISIVE Test Methods Handbook: Test Methods for Evaluating sUAS in Subterranean and Constrained Indoor Environments, Version 1.1
Nov 01, 2022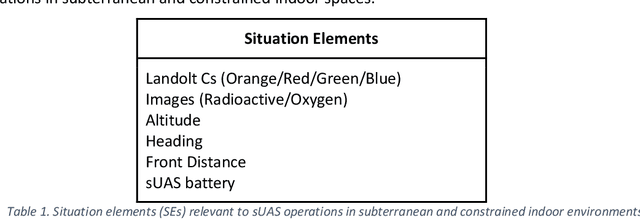
This handbook outlines all test methods developed under the Development and Execution of Comprehensive and Integrated Subterranean Intelligent Vehicle Evaluations (DECISIVE) project by the University of Massachusetts Lowell for evaluating small unmanned aerial systems (sUAS) performance in subterranean and constrained indoor environments, spanning communications, field readiness, interface, obstacle avoidance, navigation, mapping, autonomy, trust, and situation awareness. For sUAS deployment in subterranean and constrained indoor environments, this puts forth two assumptions about applicable sUAS to be evaluated using these test methods: (1) able to operate without access to GPS signal, and (2) width from prop top to prop tip does not exceed 91 cm (36 in) wide (i.e., can physically fit through a typical doorway, although successful navigation through is not guaranteed). All test methods are specified using a common format: Purpose, Summary of Test Method, Apparatus and Artifacts, Equipment, Metrics, Procedure, and Example Data. All test methods are designed to be run in real-world environments (e.g., MOUT sites) or using fabricated apparatuses (e.g., test bays built from wood, or contained inside of one or more shipping containers).