 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward a Sustainable Federated Learning Ecosystem: A Practical Least Core Mechanism for Payoff Allocation
Feb 03, 2026Emerging network paradigms and applications increasingly rely on federated learning (FL) to enable collaborative intelligence while preserving privacy. However, the sustainability of such collaborative environments hinges on a fair and stable payoff allocation mechanism. Focusing on coalition stability, this paper introduces a payoff allocation framework based on the least core (LC) concept. Unlike traditional methods, the LC prioritizes the cohesion of the federation by minimizing the maximum dissatisfaction among all potential subgroups, ensuring that no participant has an incentive to break away. To adapt this game-theoretic concept to practical, large-scale networks, we propose a streamlined implementation with a stack-based pruning algorithm, effectively balancing computational efficiency with allocation precision. Case studies in federated intrusion detection demonstrate that our mechanism correctly identifies pivotal contributors and strategic alliances. The results confirm that the practical LC framework promotes stable collaboration and fosters a sustainable FL ecosystem.
VIBEVOICE-ASR Technical Report
Jan 26, 2026This report presents VibeVoice-ASR, a general-purpose speech understanding framework built upon VibeVoice, designed to address the persistent challenges of context fragmentation and multi-speaker complexity in long-form audio (e.g., meetings, podcasts) that remain despite recent advancements in short-form speech recognition. Unlike traditional pipelined approaches that rely on audio chunking, VibeVoice-ASRsupports single-pass processing for up to 60 minutes of audio. It unifies Automatic Speech Recognition, Speaker Diarization, and Timestamping into a single end-to-end generation task. In addition, VibeVoice-ASR supports over 50 languages, requires no explicit language setting, and natively handles code-switching within and across utterances. Furthermore, we introduce a prompt-based context injection mechanism that allows users to supply customized conetxt, significantly improving accuracy on domain-specific terminology and polyphonic character disambiguation.
BMDS-Net: A Bayesian Multi-Modal Deep Supervision Network for Robust Brain Tumor Segmentation
Jan 24, 2026Accurate brain tumor segmentation from multi-modal magnetic resonance imaging (MRI) is a prerequisite for precise radiotherapy planning and surgical navigation. While recent Transformer-based models such as Swin UNETR have achieved impressive benchmark performance, their clinical utility is often compromised by two critical issues: sensitivity to missing modalities (common in clinical practice) and a lack of confidence calibration. Merely chasing higher Dice scores on idealized data fails to meet the safety requirements of real-world medical deployment. In this work, we propose BMDS-Net, a unified framework that prioritizes clinical robustness and trustworthiness over simple metric maximization. Our contribution is three-fold. First, we construct a robust deterministic backbone by integrating a Zero-Init Multimodal Contextual Fusion (MMCF) module and a Residual-Gated Deep Decoder Supervision (DDS) mechanism, enabling stable feature learning and precise boundary delineation with significantly reduced Hausdorff Distance, even under modality corruption. Second, and most importantly, we introduce a memory-efficient Bayesian fine-tuning strategy that transforms the network into a probabilistic predictor, providing voxel-wise uncertainty maps to highlight potential errors for clinicians. Third, comprehensive experiments on the BraTS 2021 dataset demonstrate that BMDS-Net not only maintains competitive accuracy but, more importantly, exhibits superior stability in missing-modality scenarios where baseline models fail. The source code is publicly available at https://github.com/RyanZhou168/BMDS-Net.
Virtual Width Networks
Nov 17, 2025



We introduce Virtual Width Networks (VWN), a framework that delivers the benefits of wider representations without incurring the quadratic cost of increasing the hidden size. VWN decouples representational width from backbone width, expanding the embedding space while keeping backbone compute nearly constant. In our large-scale experiment, an 8-times expansion accelerates optimization by over 2 times for next-token and 3 times for next-2-token prediction. The advantage amplifies over training as both the loss gap grows and the convergence-speedup ratio increases, showing that VWN is not only token-efficient but also increasingly effective with scale. Moreover, we identify an approximately log-linear scaling relation between virtual width and loss reduction, offering an initial empirical basis and motivation for exploring virtual-width scaling as a new dimension of large-model efficiency.
A Closer Look at Personalized Fine-Tuning in Heterogeneous Federated Learning
Nov 16, 2025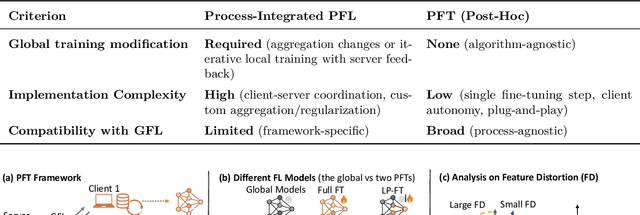
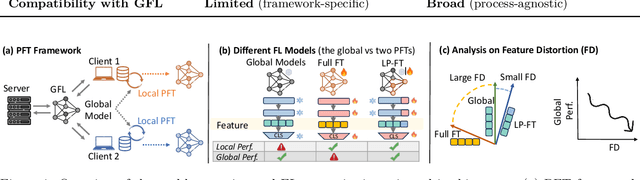
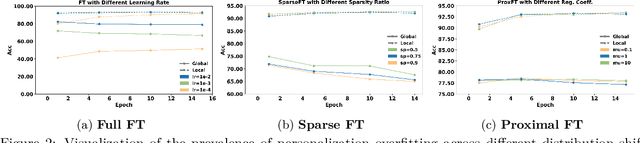
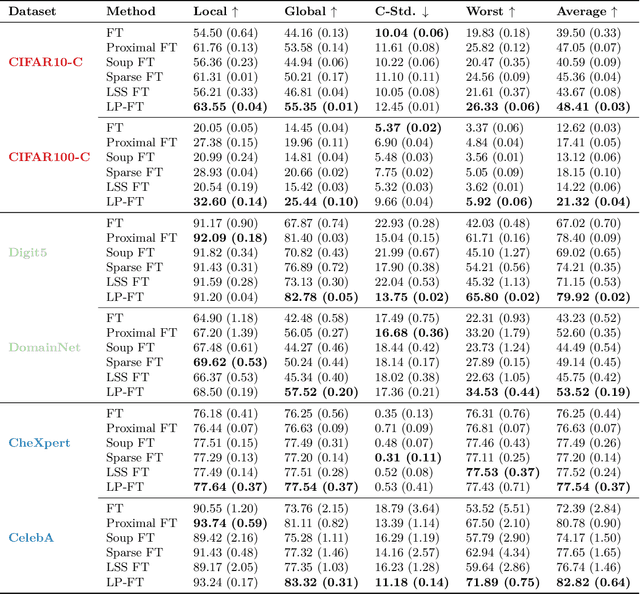
Federated Learning (FL) enables decentralized, privacy-preserving model training but struggles to balance global generalization and local personalization due to non-identical data distributions across clients. Personalized Fine-Tuning (PFT), a popular post-hoc solution, fine-tunes the final global model locally but often overfits to skewed client distributions or fails under domain shifts. We propose adapting Linear Probing followed by full Fine-Tuning (LP-FT), a principled centralized strategy for alleviating feature distortion (Kumar et al., 2022), to the FL setting. Through systematic evaluation across seven datasets and six PFT variants, we demonstrate LP-FT's superiority in balancing personalization and generalization. Our analysis uncovers federated feature distortion, a phenomenon where local fine-tuning destabilizes globally learned features, and theoretically characterizes how LP-FT mitigates this via phased parameter updates. We further establish conditions (e.g., partial feature overlap, covariate-concept shift) under which LP-FT outperforms standard fine-tuning, offering actionable guidelines for deploying robust personalization in FL.
VibeVoice Technical Report
Aug 26, 2025This report presents VibeVoice, a novel model designed to synthesize long-form speech with multiple speakers by employing next-token diffusion, which is a unified method for modeling continuous data by autoregressively generating latent vectors via diffusion. To enable this, we introduce a novel continuous speech tokenizer that, when compared to the popular Encodec model, improves data compression by 80 times while maintaining comparable performance. The tokenizer effectively preserves audio fidelity while significantly boosting computational efficiency for processing long sequences. Thus, VibeVoice can synthesize long-form speech for up to 90 minutes (in a 64K context window length) with a maximum of 4 speakers, capturing the authentic conversational ``vibe'' and surpassing open-source and proprietary dialogue models.
A Survey on Cloud-Edge-Terminal Collaborative Intelligence in AIoT Networks
Aug 26, 2025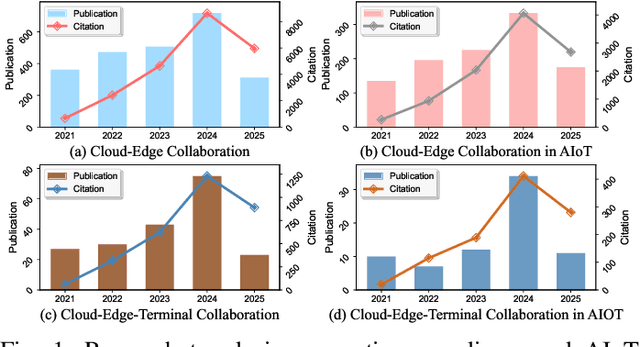
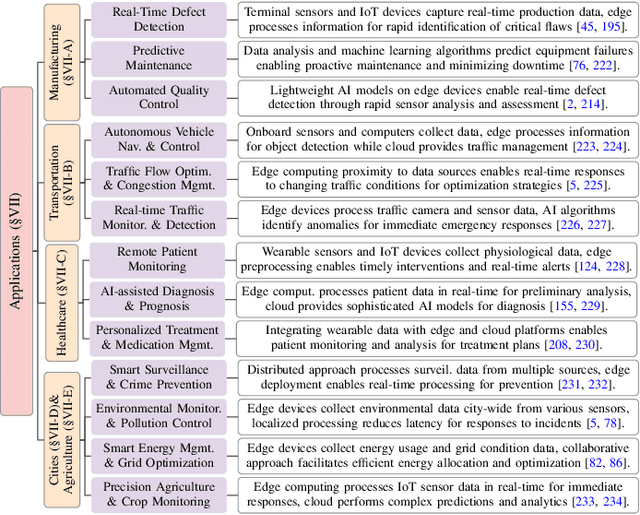
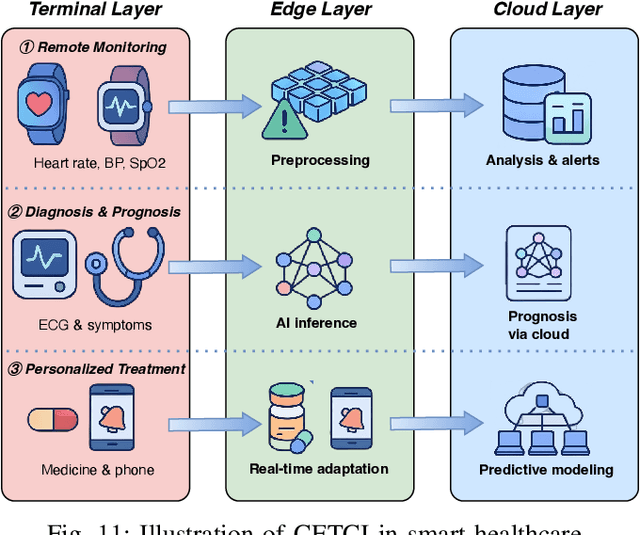
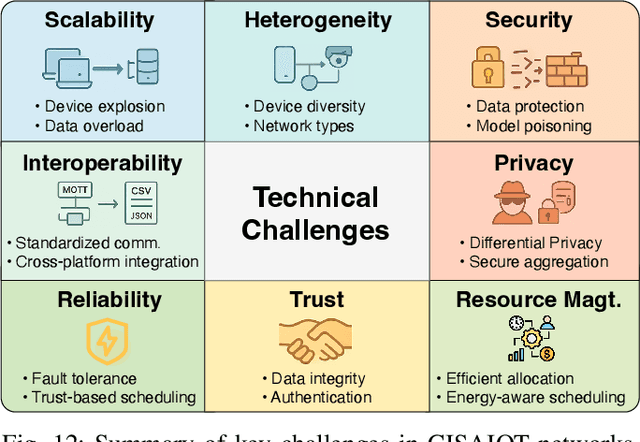
The proliferation of Internet of things (IoT) devices in smart cities, transportation, healthcare, and industrial applications, coupled with the explosive growth of AI-driven services, has increased demands for efficient distributed computing architectures and networks, driving cloud-edge-terminal collaborative intelligence (CETCI) as a fundamental paradigm within the artificial intelligence of things (AIoT) community. With advancements in deep learning, large language models (LLMs), and edge computing, CETCI has made significant progress with emerging AIoT applications, moving beyond isolated layer optimization to deployable collaborative intelligence systems for AIoT (CISAIOT), a practical research focus in AI, distributed computing, and communications. This survey describes foundational architectures, enabling technologies, and scenarios of CETCI paradigms, offering a tutorial-style review for CISAIOT beginners. We systematically analyze architectural components spanning cloud, edge, and terminal layers, examining core technologies including network virtualization, container orchestration, and software-defined networking, while presenting categorizations of collaboration paradigms that cover task offloading, resource allocation, and optimization across heterogeneous infrastructures. Furthermore, we explain intelligent collaboration learning frameworks by reviewing advances in federated learning, distributed deep learning, edge-cloud model evolution, and reinforcement learning-based methods. Finally, we discuss challenges (e.g., scalability, heterogeneity, interoperability) and future trends (e.g., 6G+, agents, quantum computing, digital twin), highlighting how integration of distributed computing and communication can address open issues and guide development of robust, efficient, and secure collaborative AIoT systems.
Seed1.5-VL Technical Report
May 11, 2025



We present Seed1.5-VL, a vision-language foundation model designed to advance general-purpose multimodal understanding and reasoning. Seed1.5-VL is composed with a 532M-parameter vision encoder and a Mixture-of-Experts (MoE) LLM of 20B active parameters. Despite its relatively compact architecture, it delivers strong performance across a wide spectrum of public VLM benchmarks and internal evaluation suites, achieving the state-of-the-art performance on 38 out of 60 public benchmarks. Moreover, in agent-centric tasks such as GUI control and gameplay, Seed1.5-VL outperforms leading multimodal systems, including OpenAI CUA and Claude 3.7. Beyond visual and video understanding, it also demonstrates strong reasoning abilities, making it particularly effective for multimodal reasoning challenges such as visual puzzles. We believe these capabilities will empower broader applications across diverse tasks. In this report, we mainly provide a comprehensive review of our experiences in building Seed1.5-VL across model design, data construction, and training at various stages, hoping that this report can inspire further research. Seed1.5-VL is now accessible at https://www.volcengine.com/ (Volcano Engine Model ID: doubao-1-5-thinking-vision-pro-250428)
Edge-Cloud Collaborative Computing on Distributed Intelligence and Model Optimization: A Survey
May 03, 2025



Edge-cloud collaborative computing (ECCC) has emerged as a pivotal paradigm for addressing the computational demands of modern intelligent applications, integrating cloud resources with edge devices to enable efficient, low-latency processing. Recent advancements in AI, particularly deep learning and large language models (LLMs), have dramatically enhanced the capabilities of these distributed systems, yet introduce significant challenges in model deployment and resource management. In this survey, we comprehensive examine the intersection of distributed intelligence and model optimization within edge-cloud environments, providing a structured tutorial on fundamental architectures, enabling technologies, and emerging applications. Additionally, we systematically analyze model optimization approaches, including compression, adaptation, and neural architecture search, alongside AI-driven resource management strategies that balance performance, energy efficiency, and latency requirements. We further explore critical aspects of privacy protection and security enhancement within ECCC systems and examines practical deployments through diverse applications, spanning autonomous driving, healthcare, and industrial automation. Performance analysis and benchmarking techniques are also thoroughly explored to establish evaluation standards for these complex systems. Furthermore, the review identifies critical research directions including LLMs deployment, 6G integration, neuromorphic computing, and quantum computing, offering a roadmap for addressing persistent challenges in heterogeneity management, real-time processing, and scalability. By bridging theoretical advancements and practical deployments, this survey offers researchers and practitioners a holistic perspective on leveraging AI to optimize distributed computing environments, fostering innovation in next-generation intelligent systems.
CLIP-Optimized Multimodal Image Enhancement via ISP-CNN Fusion for Coal Mine IoVT under Uneven Illumination
Feb 26, 2025Clear monitoring images are crucial for the safe operation of coal mine Internet of Video Things (IoVT) systems. However, low illumination and uneven brightness in underground environments significantly degrade image quality, posing challenges for enhancement methods that often rely on difficult-to-obtain paired reference images. Additionally, there is a trade-off between enhancement performance and computational efficiency on edge devices within IoVT systems.To address these issues, we propose a multimodal image enhancement method tailored for coal mine IoVT, utilizing an ISP-CNN fusion architecture optimized for uneven illumination. This two-stage strategy combines global enhancement with detail optimization, effectively improving image quality, especially in poorly lit areas. A CLIP-based multimodal iterative optimization allows for unsupervised training of the enhancement algorithm. By integrating traditional image signal processing (ISP) with convolutional neural networks (CNN), our approach reduces computational complexity while maintaining high performance, making it suitable for real-time deployment on edge devices.Experimental results demonstrate that our method effectively mitigates uneven brightness and enhances key image quality metrics, with PSNR improvements of 2.9%-4.9%, SSIM by 4.3%-11.4%, and VIF by 4.9%-17.8% compared to seven state-of-the-art algorithms. Simulated coal mine monitoring scenarios validate our method's ability to balance performance and computational demands, facilitating real-time enhancement and supporting safer mining operations.