 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoMA: A Real-to-Sim Neural Simulator for Robotic Soft-body Manipulation
Feb 02, 2026Simulating deformable objects under rich interactions remains a fundamental challenge for real-to-sim robot manipulation, with dynamics jointly driven by environmental effects and robot actions. Existing simulators rely on predefined physics or data-driven dynamics without robot-conditioned control, limiting accuracy, stability, and generalization. This paper presents SoMA, a 3D Gaussian Splat simulator for soft-body manipulation. SoMA couples deformable dynamics, environmental forces, and robot joint actions in a unified latent neural space for end-to-end real-to-sim simulation. Modeling interactions over learned Gaussian splats enables controllable, stable long-horizon manipulation and generalization beyond observed trajectories without predefined physical models. SoMA improves resimulation accuracy and generalization on real-world robot manipulation by 20%, enabling stable simulation of complex tasks such as long-horizon cloth folding.
InternVLA-A1: Unifying Understanding, Generation and Action for Robotic Manipulation
Jan 05, 2026Prevalent Vision-Language-Action (VLA) models are typically built upon Multimodal Large Language Models (MLLMs) and demonstrate exceptional proficiency in semantic understanding, but they inherently lack the capability to deduce physical world dynamics. Consequently, recent approaches have shifted toward World Models, typically formulated via video prediction; however, these methods often suffer from a lack of semantic grounding and exhibit brittleness when handling prediction errors. To synergize semantic understanding with dynamic predictive capabilities, we present InternVLA-A1. This model employs a unified Mixture-of-Transformers architecture, coordinating three experts for scene understanding, visual foresight generation, and action execution. These components interact seamlessly through a unified masked self-attention mechanism. Building upon InternVL3 and Qwen3-VL, we instantiate InternVLA-A1 at 2B and 3B parameter scales. We pre-train these models on hybrid synthetic-real datasets spanning InternData-A1 and Agibot-World, covering over 533M frames. This hybrid training strategy effectively harnesses the diversity of synthetic simulation data while minimizing the sim-to-real gap. We evaluated InternVLA-A1 across 12 real-world robotic tasks and simulation benchmark. It significantly outperforms leading models like pi0 and GR00T N1.5, achieving a 14.5\% improvement in daily tasks and a 40\%-73.3\% boost in dynamic settings, such as conveyor belt sorting.
Decoupled Diffusion Sparks Adaptive Scene Generation
Apr 14, 2025Controllable scene generation could reduce the cost of diverse data collection substantially for autonomous driving. Prior works formulate the traffic layout generation as predictive progress, either by denoising entire sequences at once or by iteratively predicting the next frame. However, full sequence denoising hinders online reaction, while the latter's short-sighted next-frame prediction lacks precise goal-state guidance. Further, the learned model struggles to generate complex or challenging scenarios due to a large number of safe and ordinal driving behaviors from open datasets. To overcome these, we introduce Nexus, a decoupled scene generation framework that improves reactivity and goal conditioning by simulating both ordinal and challenging scenarios from fine-grained tokens with independent noise states. At the core of the decoupled pipeline is the integration of a partial noise-masking training strategy and a noise-aware schedule that ensures timely environmental updates throughout the denoising process. To complement challenging scenario generation, we collect a dataset consisting of complex corner cases. It covers 540 hours of simulated data, including high-risk interactions such as cut-in, sudden braking, and collision. Nexus achieves superior generation realism while preserving reactivity and goal orientation, with a 40% reduction in displacement error. We further demonstrate that Nexus improves closed-loop planning by 20% through data augmentation and showcase its capability in safety-critical data generation.
SimGen: Simulator-conditioned Driving Scene Generation
Jun 13, 2024
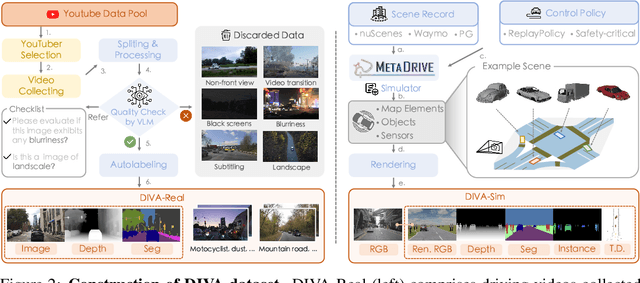
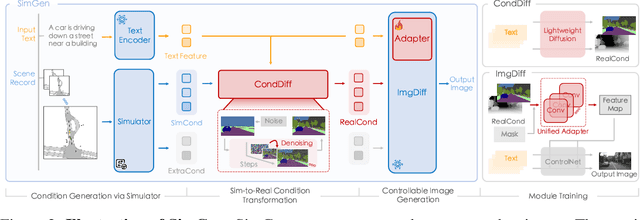

Controllable synthetic data generation can substantially lower the annotation cost of training data in autonomous driving research and development. Prior works use diffusion models to generate driving images conditioned on the 3D object layout. However, those models are trained on small-scale datasets like nuScenes, which lack appearance and layout diversity. Moreover, the trained models can only generate images based on the real-world layout data from the validation set of the same dataset, where overfitting might happen. In this work, we introduce a simulator-conditioned scene generation framework called SimGen that can learn to generate diverse driving scenes by mixing data from the simulator and the real world. It uses a novel cascade diffusion pipeline to address challenging sim-to-real gaps and multi-condition conflicts. A driving video dataset DIVA is collected to enhance the generative diversity of SimGen, which contains over 147.5 hours of real-world driving videos from 73 locations worldwide and simulated driving data from the MetaDrive simulator. SimGen achieves superior generation quality and diversity while preserving controllability based on the text prompt and the layout pulled from a simulator. We further demonstrate the improvements brought by SimGen for synthetic data augmentation on the BEV detection and segmentation task and showcase its capability in safety-critical data generation. Code, data, and models will be made available.
Embodied Understanding of Driving Scenarios
Mar 07, 2024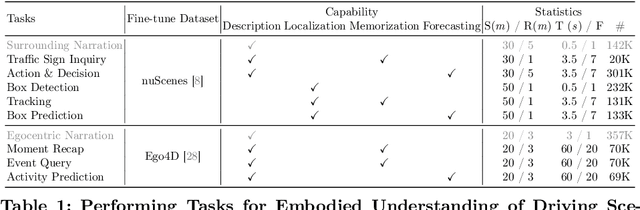
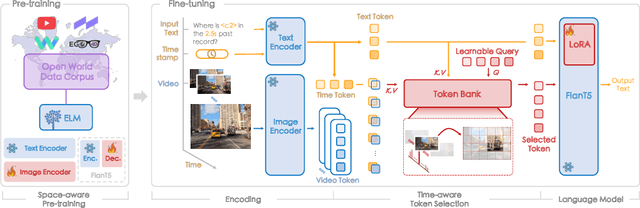
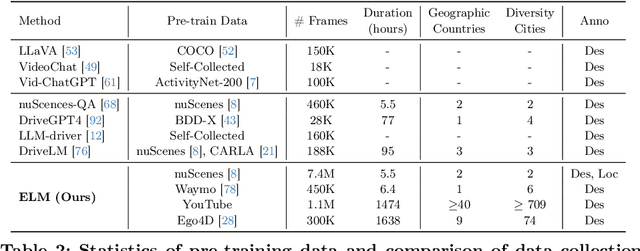
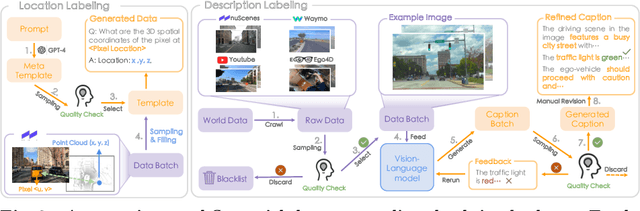
Embodied scene understanding serves as the cornerstone for autonomous agents to perceive, interpret, and respond to open driving scenarios. Such understanding is typically founded upon Vision-Language Models (VLMs). Nevertheless, existing VLMs are restricted to the 2D domain, devoid of spatial awareness and long-horizon extrapolation proficiencies. We revisit the key aspects of autonomous driving and formulate appropriate rubrics. Hereby, we introduce the Embodied Language Model (ELM), a comprehensive framework tailored for agents' understanding of driving scenes with large spatial and temporal spans. ELM incorporates space-aware pre-training to endow the agent with robust spatial localization capabilities. Besides, the model employs time-aware token selection to accurately inquire about temporal cues. We instantiate ELM on the reformulated multi-faced benchmark, and it surpasses previous state-of-the-art approaches in all aspects. All code, data, and models will be publicly shared.
Extend Your Own Correspondences: Unsupervised Distant Point Cloud Registration by Progressive Distance Extension
Mar 06, 2024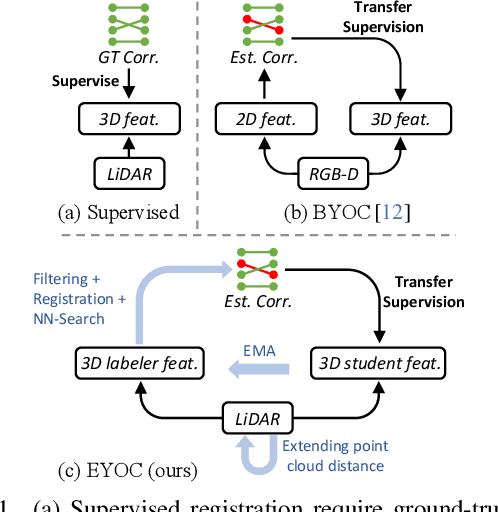
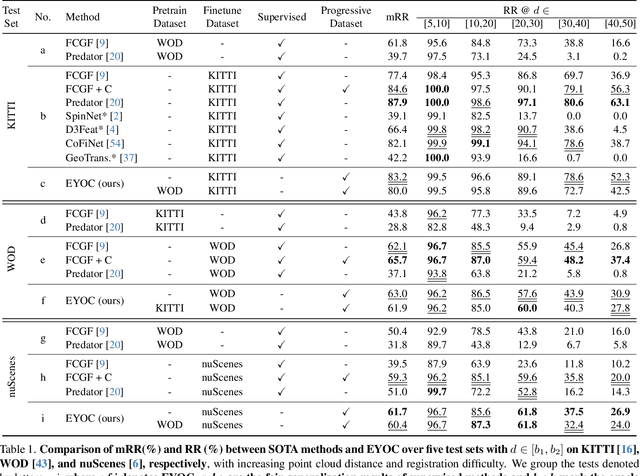
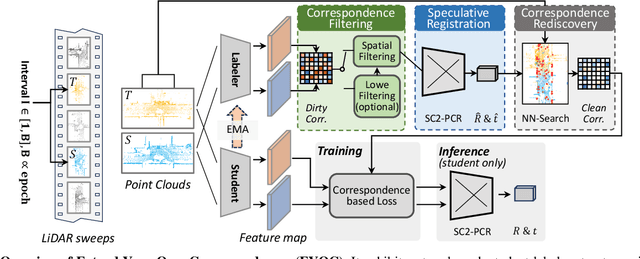

Registration of point clouds collected from a pair of distant vehicles provides a comprehensive and accurate 3D view of the driving scenario, which is vital for driving safety related applications, yet existing literature suffers from the expensive pose label acquisition and the deficiency to generalize to new data distributions. In this paper, we propose EYOC, an unsupervised distant point cloud registration method that adapts to new point cloud distributions on the fly, requiring no global pose labels. The core idea of EYOC is to train a feature extractor in a progressive fashion, where in each round, the feature extractor, trained with near point cloud pairs, can label slightly farther point cloud pairs, enabling self-supervision on such far point cloud pairs. This process continues until the derived extractor can be used to register distant point clouds. Particularly, to enable high-fidelity correspondence label generation, we devise an effective spatial filtering scheme to select the most representative correspondences to register a point cloud pair, and then utilize the aligned point clouds to discover more correct correspondences. Experiments show that EYOC can achieve comparable performance with state-of-the-art supervised methods at a lower training cost. Moreover, it outwits supervised methods regarding generalization performance on new data distributions.
Density-invariant Features for Distant Point Cloud Registration
Aug 08, 2023

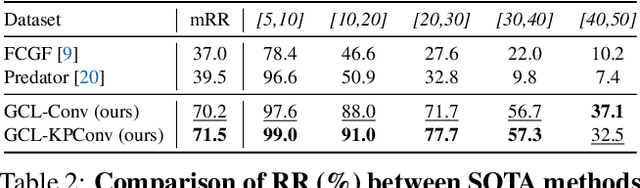
Registration of distant outdoor LiDAR point clouds is crucial to extending the 3D vision of collaborative autonomous vehicles, and yet is challenging due to small overlapping area and a huge disparity between observed point densities. In this paper, we propose Group-wise Contrastive Learning (GCL) scheme to extract density-invariant geometric features to register distant outdoor LiDAR point clouds. We mark through theoretical analysis and experiments that, contrastive positives should be independent and identically distributed (i.i.d.), in order to train densityinvariant feature extractors. We propose upon the conclusion a simple yet effective training scheme to force the feature of multiple point clouds in the same spatial location (referred to as positive groups) to be similar, which naturally avoids the sampling bias introduced by a pair of point clouds to conform with the i.i.d. principle. The resulting fully-convolutional feature extractor is more powerful and density-invariant than state-of-the-art methods, improving the registration recall of distant scenarios on KITTI and nuScenes benchmarks by 40.9% and 26.9%, respectively. Code is available at https://github.com/liuQuan98/GCL.
APR: Online Distant Point Cloud Registration Through Aggregated Point Cloud Reconstruction
May 08, 2023
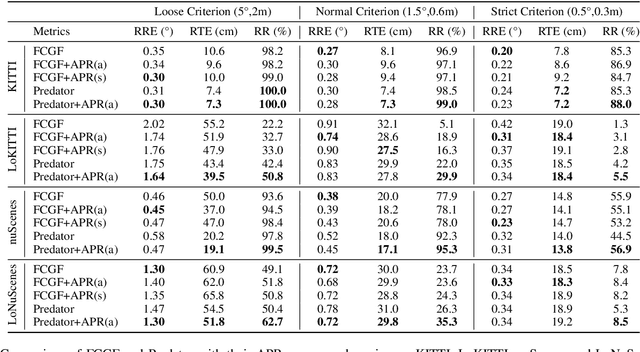
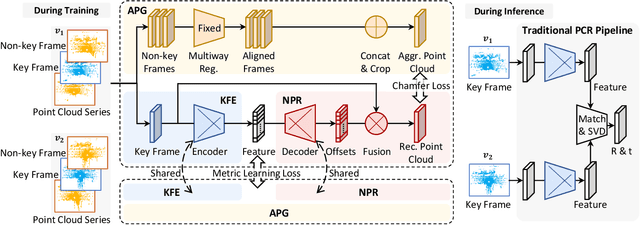

For many driving safety applications, it is of great importance to accurately register LiDAR point clouds generated on distant moving vehicles. However, such point clouds have extremely different point density and sensor perspective on the same object, making registration on such point clouds very hard. In this paper, we propose a novel feature extraction framework, called APR, for online distant point cloud registration. Specifically, APR leverages an autoencoder design, where the autoencoder reconstructs a denser aggregated point cloud with several frames instead of the original single input point cloud. Our design forces the encoder to extract features with rich local geometry information based on one single input point cloud. Such features are then used for online distant point cloud registration. We conduct extensive experiments against state-of-the-art (SOTA) feature extractors on KITTI and nuScenes datasets. Results show that APR outperforms all other extractors by a large margin, increasing average registration recall of SOTA extractors by 7.1% on LoKITTI and 4.6% on LoNuScenes. Code is available at https://github.com/liuQuan98/APR.
MonoATT: Online Monocular 3D Object Detection with Adaptive Token Transformer
Mar 23, 2023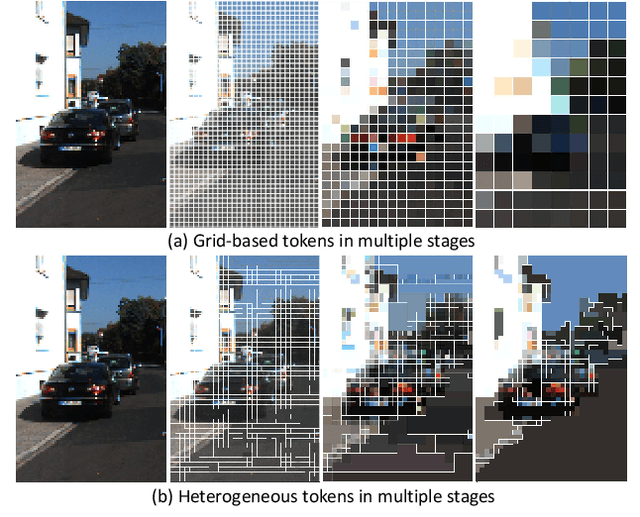
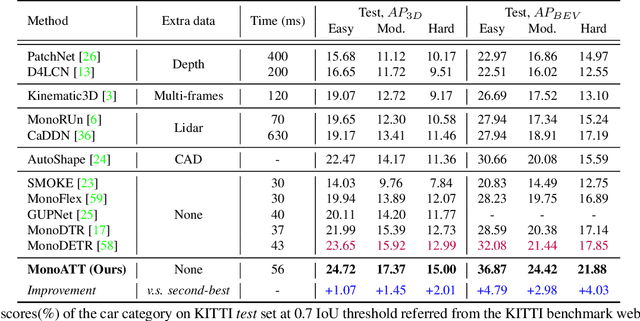
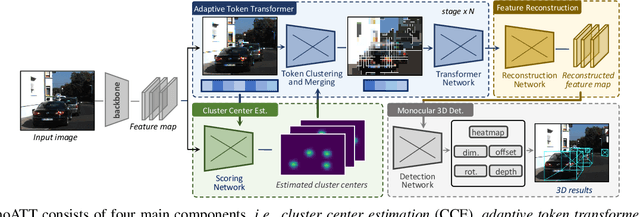
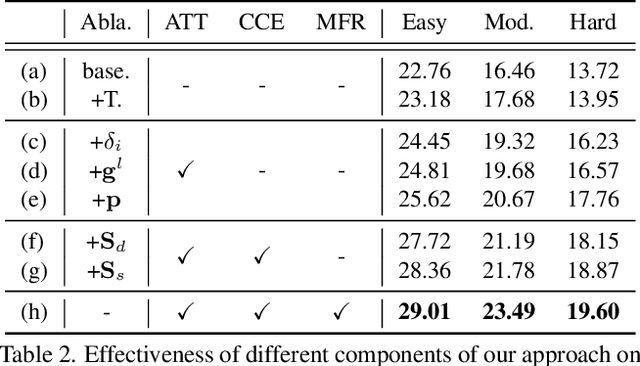
Mobile monocular 3D object detection (Mono3D) (e.g., on a vehicle, a drone, or a robot) is an important yet challenging task. Existing transformer-based offline Mono3D models adopt grid-based vision tokens, which is suboptimal when using coarse tokens due to the limited available computational power. In this paper, we propose an online Mono3D framework, called MonoATT, which leverages a novel vision transformer with heterogeneous tokens of varying shapes and sizes to facilitate mobile Mono3D. The core idea of MonoATT is to adaptively assign finer tokens to areas of more significance before utilizing a transformer to enhance Mono3D. To this end, we first use prior knowledge to design a scoring network for selecting the most important areas of the image, and then propose a token clustering and merging network with an attention mechanism to gradually merge tokens around the selected areas in multiple stages. Finally, a pixel-level feature map is reconstructed from heterogeneous tokens before employing a SOTA Mono3D detector as the underlying detection core. Experiment results on the real-world KITTI dataset demonstrate that MonoATT can effectively improve the Mono3D accuracy for both near and far objects and guarantee low latency. MonoATT yields the best performance compared with the state-of-the-art methods by a large margin and is ranked number one on the KITTI 3D benchmark.
MoGDE: Boosting Mobile Monocular 3D Object Detection with Ground Depth Estimation
Mar 23, 2023Monocular 3D object detection (Mono3D) in mobile settings (e.g., on a vehicle, a drone, or a robot) is an important yet challenging task. Due to the near-far disparity phenomenon of monocular vision and the ever-changing camera pose, it is hard to acquire high detection accuracy, especially for far objects. Inspired by the insight that the depth of an object can be well determined according to the depth of the ground where it stands, in this paper, we propose a novel Mono3D framework, called MoGDE, which constantly estimates the corresponding ground depth of an image and then utilizes the estimated ground depth information to guide Mono3D. To this end, we utilize a pose detection network to estimate the pose of the camera and then construct a feature map portraying pixel-level ground depth according to the 3D-to-2D perspective geometry. Moreover, to improve Mono3D with the estimated ground depth, we design an RGB-D feature fusion network based on the transformer structure, where the long-range self-attention mechanism is utilized to effectively identify ground-contacting points and pin the corresponding ground depth to the image feature map. We conduct extensive experiments on the real-world KITTI dataset. The results demonstrate that MoGDE can effectively improve the Mono3D accuracy and robustness for both near and far objects. MoGDE yields the best performance compared with the state-of-the-art methods by a large margin and is ranked number one on the KITTI 3D benchmark.