 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonoATT: Online Monocular 3D Object Detection with Adaptive Token Transformer
Paper and Code
Mar 23, 2023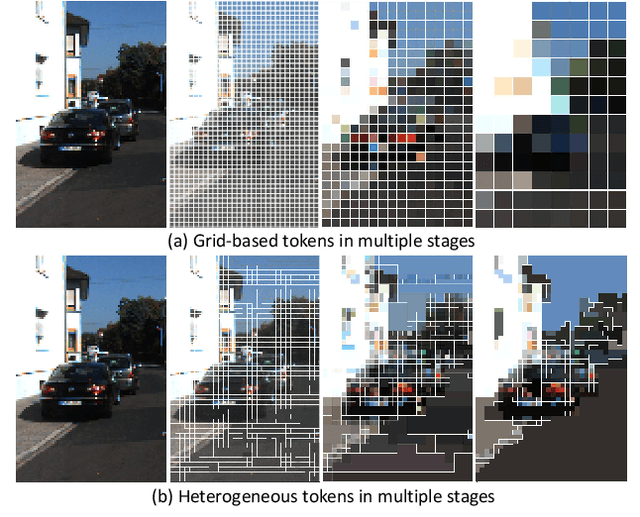
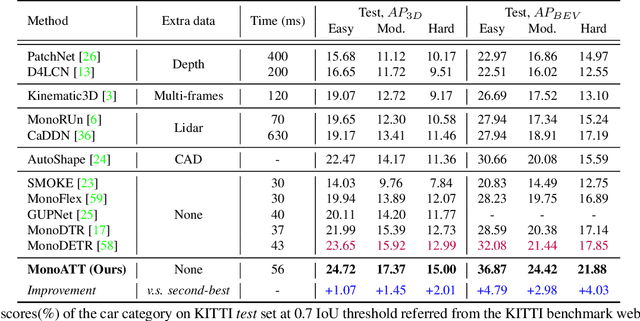
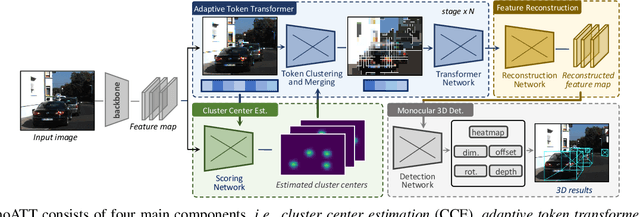
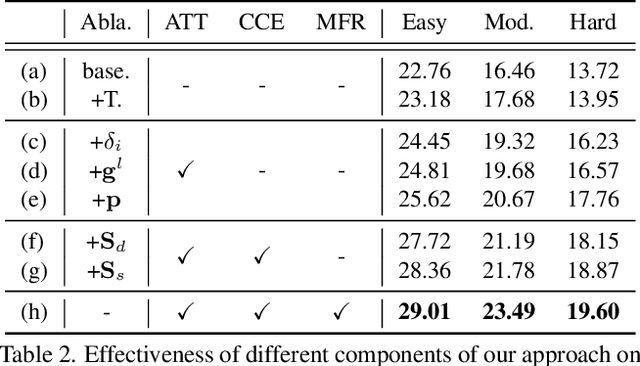
Mobile monocular 3D object detection (Mono3D) (e.g., on a vehicle, a drone, or a robot) is an important yet challenging task. Existing transformer-based offline Mono3D models adopt grid-based vision tokens, which is suboptimal when using coarse tokens due to the limited available computational power. In this paper, we propose an online Mono3D framework, called MonoATT, which leverages a novel vision transformer with heterogeneous tokens of varying shapes and sizes to facilitate mobile Mono3D. The core idea of MonoATT is to adaptively assign finer tokens to areas of more significance before utilizing a transformer to enhance Mono3D. To this end, we first use prior knowledge to design a scoring network for selecting the most important areas of the image, and then propose a token clustering and merging network with an attention mechanism to gradually merge tokens around the selected areas in multiple stages. Finally, a pixel-level feature map is reconstructed from heterogeneous tokens before employing a SOTA Mono3D detector as the underlying detection core. Experiment results on the real-world KITTI dataset demonstrate that MonoATT can effectively improve the Mono3D accuracy for both near and far objects and guarantee low latency. MonoATT yields the best performance compared with the state-of-the-art methods by a large margin and is ranked number one on the KITTI 3D benchmark.