 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeiFSQ: Improving FSQ for Image Generation with 1 Line of Code
Jan 27, 2026The field of image generation is currently bifurcated into autoregressive (AR) models operating on discrete tokens and diffusion models utilizing continuous latents. This divide, rooted in the distinction between VQ-VAEs and VAEs, hinders unified modeling and fair benchmarking. Finite Scalar Quantization (FSQ) offers a theoretical bridge, yet vanilla FSQ suffers from a critical flaw: its equal-interval quantization can cause activation collapse. This mismatch forces a trade-off between reconstruction fidelity and information efficiency. In this work, we resolve this dilemma by simply replacing the activation function in original FSQ with a distribution-matching mapping to enforce a uniform prior. Termed iFSQ, this simple strategy requires just one line of code yet mathematically guarantees both optimal bin utilization and reconstruction precision. Leveraging iFSQ as a controlled benchmark, we uncover two key insights: (1) The optimal equilibrium between discrete and continuous representations lies at approximately 4 bits per dimension. (2) Under identical reconstruction constraints, AR models exhibit rapid initial convergence, whereas diffusion models achieve a superior performance ceiling, suggesting that strict sequential ordering may limit the upper bounds of generation quality. Finally, we extend our analysis by adapting Representation Alignment (REPA) to AR models, yielding LlamaGen-REPA. Codes is available at https://github.com/Tencent-Hunyuan/iFSQ
Complementary Learning System Empowers Online Continual Learning of Vehicle Motion Forecasting in Smart Cities
Aug 27, 2025



Artificial intelligence underpins most smart city services, yet deep neural network (DNN) that forecasts vehicle motion still struggle with catastrophic forgetting, the loss of earlier knowledge when models are updated. Conventional fixes enlarge the training set or replay past data, but these strategies incur high data collection costs, sample inefficiently and fail to balance long- and short-term experience, leaving them short of human-like continual learning. Here we introduce Dual-LS, a task-free, online continual learning paradigm for DNN-based motion forecasting that is inspired by the complementary learning system of the human brain. Dual-LS pairs two synergistic memory rehearsal replay mechanisms to accelerate experience retrieval while dynamically coordinating long-term and short-term knowledge representations. Tests on naturalistic data spanning three countries, over 772,000 vehicles and cumulative testing mileage of 11,187 km show that Dual-LS mitigates catastrophic forgetting by up to 74.31\% and reduces computational resource demand by up to 94.02\%, markedly boosting predictive stability in vehicle motion forecasting without inflating data requirements. Meanwhile, it endows DNN-based vehicle motion forecasting with computation efficient and human-like continual learning adaptability fit for smart cities.
Escaping Stability-Plasticity Dilemma in Online Continual Learning for Motion Forecasting via Synergetic Memory Rehearsal
Aug 27, 2025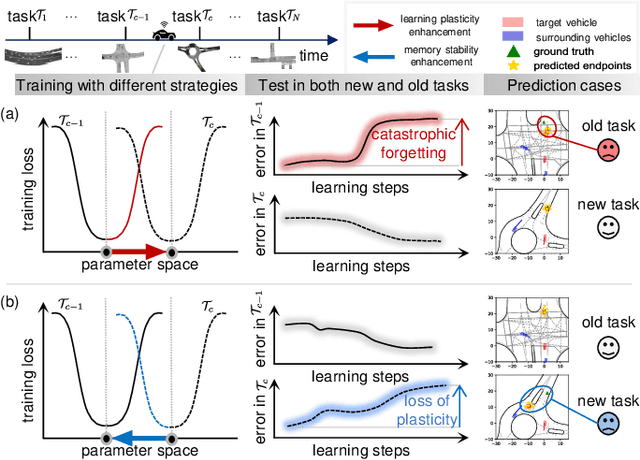
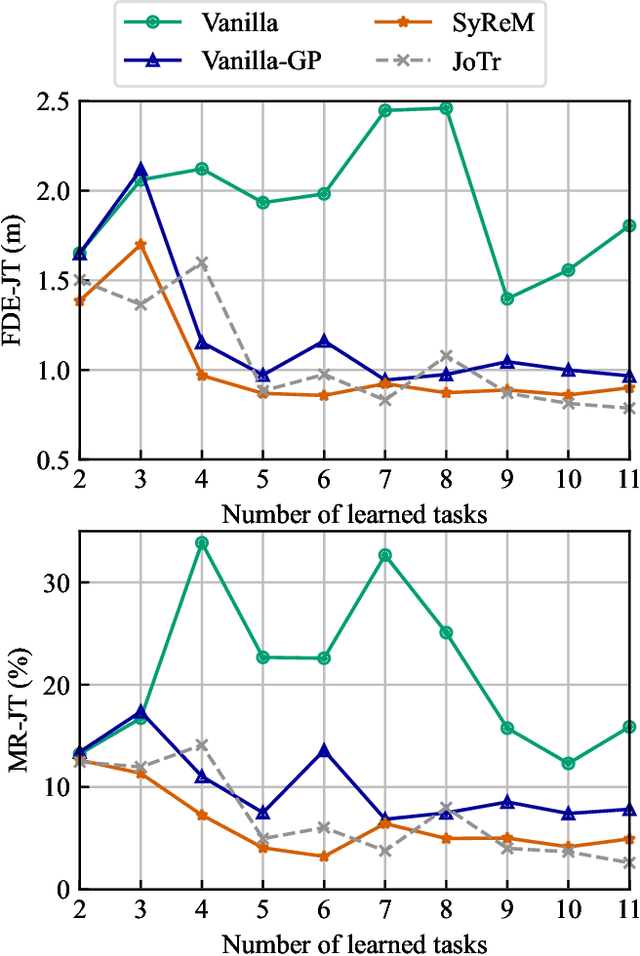
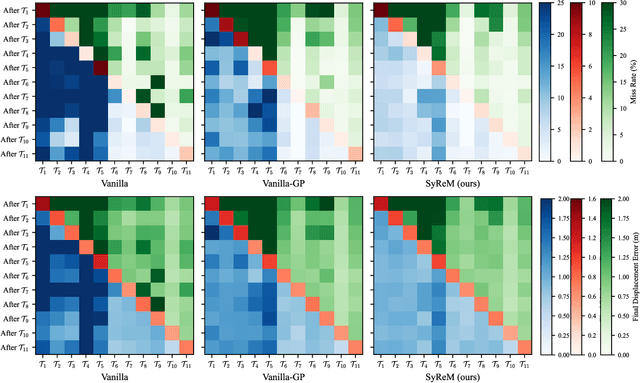
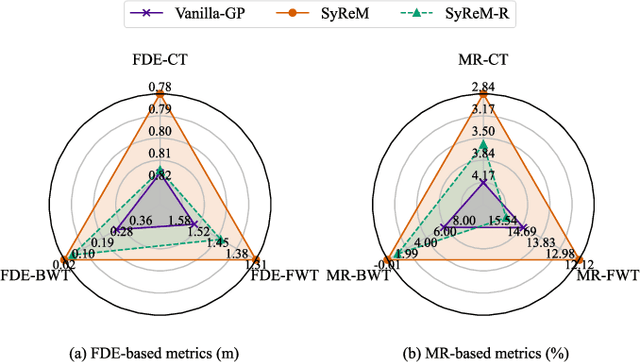
Deep neural networks (DNN) have achieved remarkable success in motion forecasting. However, most DNN-based methods suffer from catastrophic forgetting and fail to maintain their performance in previously learned scenarios after adapting to new data. Recent continual learning (CL) studies aim to mitigate this phenomenon by enhancing memory stability of DNN, i.e., the ability to retain learned knowledge. Yet, excessive emphasis on the memory stability often impairs learning plasticity, i.e., the capacity of DNN to acquire new information effectively. To address such stability-plasticity dilemma, this study proposes a novel CL method, synergetic memory rehearsal (SyReM), for DNN-based motion forecasting. SyReM maintains a compact memory buffer to represent learned knowledge. To ensure memory stability, it employs an inequality constraint that limits increments in the average loss over the memory buffer. Synergistically, a selective memory rehearsal mechanism is designed to enhance learning plasticity by selecting samples from the memory buffer that are most similar to recently observed data. This selection is based on an online-measured cosine similarity of loss gradients, ensuring targeted memory rehearsal. Since replayed samples originate from learned scenarios, this memory rehearsal mechanism avoids compromising memory stability. We validate SyReM under an online CL paradigm where training samples from diverse scenarios arrive as a one-pass stream. Experiments on 11 naturalistic driving datasets from INTERACTION demonstrate that, compared to non-CL and CL baselines, SyReM significantly mitigates catastrophic forgetting in past scenarios while improving forecasting accuracy in new ones. The implementation is publicly available at https://github.com/BIT-Jack/SyReM.
PosterCraft: Rethinking High-Quality Aesthetic Poster Generation in a Unified Framework
Jun 12, 2025
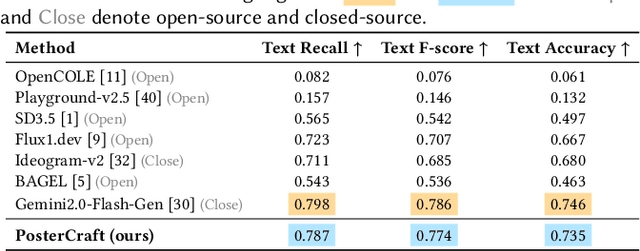
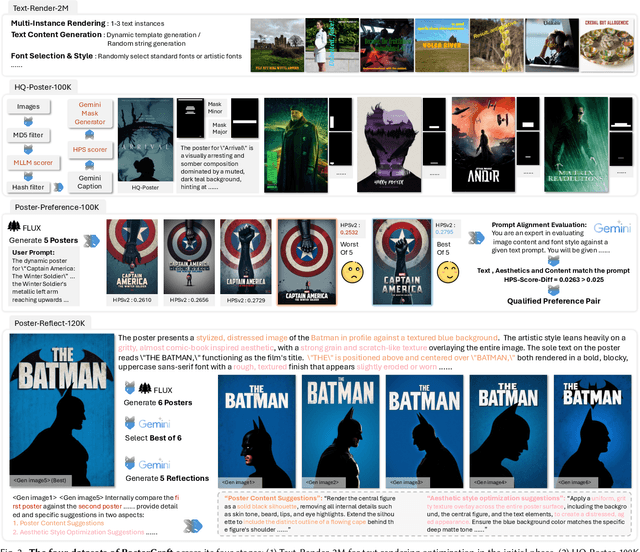
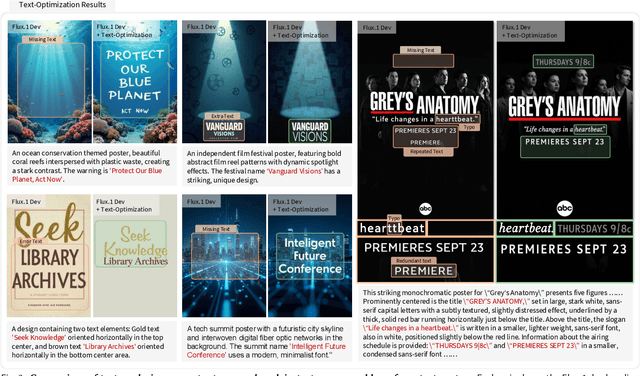
Generating aesthetic posters is more challenging than simple design images: it requires not only precise text rendering but also the seamless integration of abstract artistic content, striking layouts, and overall stylistic harmony. To address this, we propose PosterCraft, a unified framework that abandons prior modular pipelines and rigid, predefined layouts, allowing the model to freely explore coherent, visually compelling compositions. PosterCraft employs a carefully designed, cascaded workflow to optimize the generation of high-aesthetic posters: (i) large-scale text-rendering optimization on our newly introduced Text-Render-2M dataset; (ii) region-aware supervised fine-tuning on HQ-Poster100K; (iii) aesthetic-text-reinforcement learning via best-of-n preference optimization; and (iv) joint vision-language feedback refinement. Each stage is supported by a fully automated data-construction pipeline tailored to its specific needs, enabling robust training without complex architectural modifications. Evaluated on multiple experiments, PosterCraft significantly outperforms open-source baselines in rendering accuracy, layout coherence, and overall visual appeal-approaching the quality of SOTA commercial systems. Our code, models, and datasets can be found in the Project page: https://ephemeral182.github.io/PosterCraft
Track Any Anomalous Object: A Granular Video Anomaly Detection Pipeline
Jun 05, 2025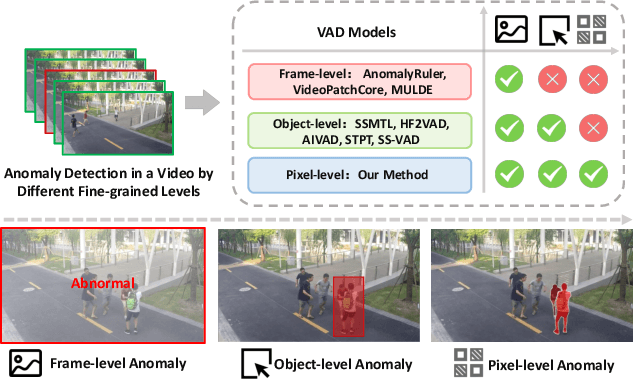
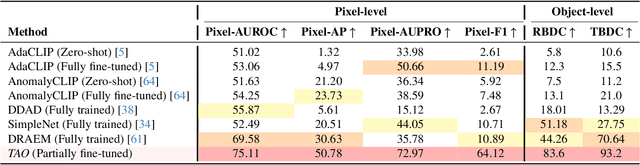
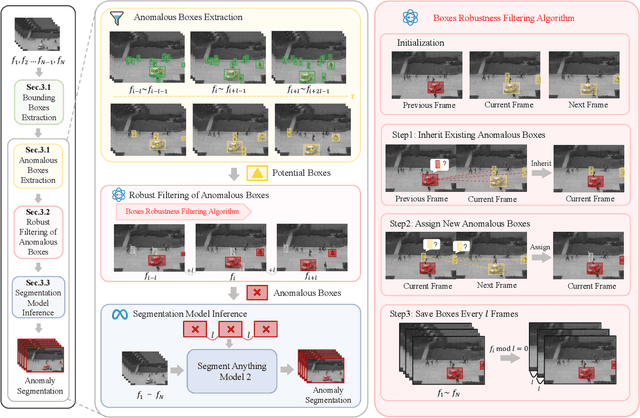

Video anomaly detection (VAD) is crucial in scenarios such as surveillance and autonomous driving, where timely detection of unexpected activities is essential. Although existing methods have primarily focused on detecting anomalous objects in videos -- either by identifying anomalous frames or objects -- they often neglect finer-grained analysis, such as anomalous pixels, which limits their ability to capture a broader range of anomalies. To address this challenge, we propose a new framework called Track Any Anomalous Object (TAO), which introduces a granular video anomaly detection pipeline that, for the first time, integrates the detection of multiple fine-grained anomalous objects into a unified framework. Unlike methods that assign anomaly scores to every pixel, our approach transforms the problem into pixel-level tracking of anomalous objects. By linking anomaly scores to downstream tasks such as segmentation and tracking, our method removes the need for threshold tuning and achieves more precise anomaly localization in long and complex video sequences. Experiments demonstrate that TAO sets new benchmarks in accuracy and robustness. Project page available online.
NTIRE 2025 Challenge on Day and Night Raindrop Removal for Dual-Focused Images: Methods and Results
Apr 19, 2025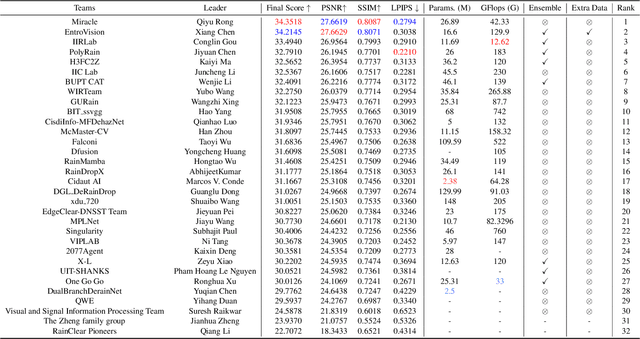
This paper reviews the NTIRE 2025 Challenge on Day and Night Raindrop Removal for Dual-Focused Images. This challenge received a wide range of impressive solutions, which are developed and evaluated using our collected real-world Raindrop Clarity dataset. Unlike existing deraining datasets, our Raindrop Clarity dataset is more diverse and challenging in degradation types and contents, which includes day raindrop-focused, day background-focused, night raindrop-focused, and night background-focused degradations. This dataset is divided into three subsets for competition: 14,139 images for training, 240 images for validation, and 731 images for testing. The primary objective of this challenge is to establish a new and powerful benchmark for the task of removing raindrops under varying lighting and focus conditions. There are a total of 361 participants in the competition, and 32 teams submitting valid solutions and fact sheets for the final testing phase. These submissions achieved state-of-the-art (SOTA) performance on the Raindrop Clarity dataset. The project can be found at https://lixinustc.github.io/CVPR-NTIRE2025-RainDrop-Competition.github.io/.
JarvisIR: Elevating Autonomous Driving Perception with Intelligent Image Restoration
Apr 05, 2025



Vision-centric perception systems struggle with unpredictable and coupled weather degradations in the wild. Current solutions are often limited, as they either depend on specific degradation priors or suffer from significant domain gaps. To enable robust and autonomous operation in real-world conditions, we propose JarvisIR, a VLM-powered agent that leverages the VLM as a controller to manage multiple expert restoration models. To further enhance system robustness, reduce hallucinations, and improve generalizability in real-world adverse weather, JarvisIR employs a novel two-stage framework consisting of supervised fine-tuning and human feedback alignment. Specifically, to address the lack of paired data in real-world scenarios, the human feedback alignment enables the VLM to be fine-tuned effectively on large-scale real-world data in an unsupervised manner. To support the training and evaluation of JarvisIR, we introduce CleanBench, a comprehensive dataset consisting of high-quality and large-scale instruction-responses pairs, including 150K synthetic entries and 80K real entries. Extensive experiments demonstrate that JarvisIR exhibits superior decision-making and restoration capabilities. Compared with existing methods, it achieves a 50% improvement in the average of all perception metrics on CleanBench-Real. Project page: https://cvpr2025-jarvisir.github.io/.
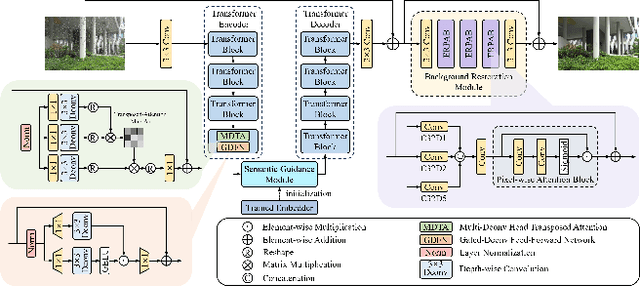
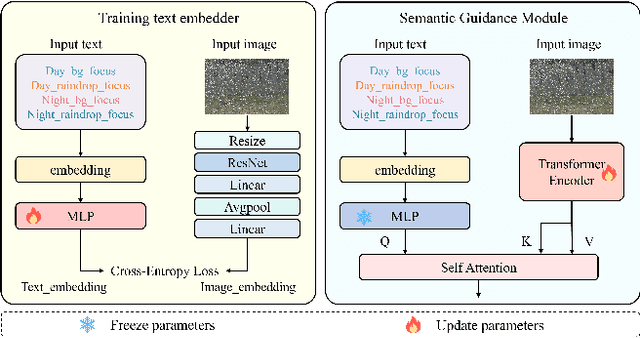
Pan-LUT: Efficient Pan-sharpening via Learnable Look-Up Tables
Mar 31, 2025
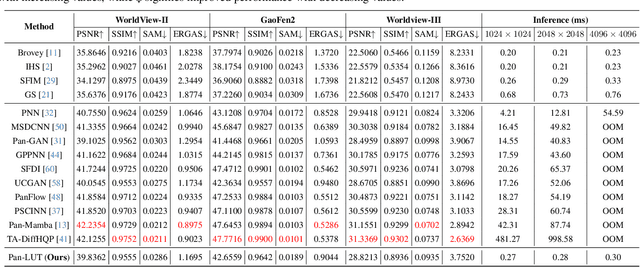
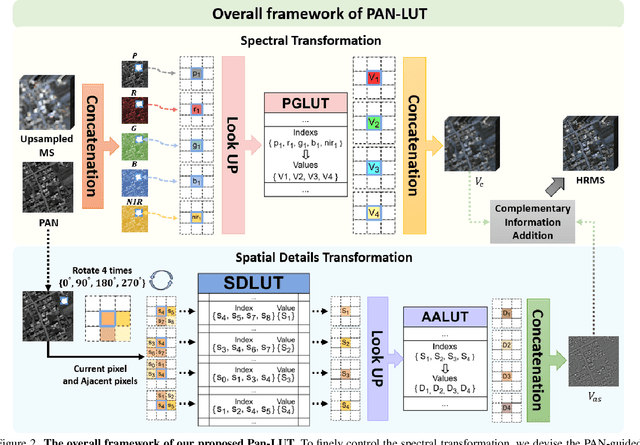
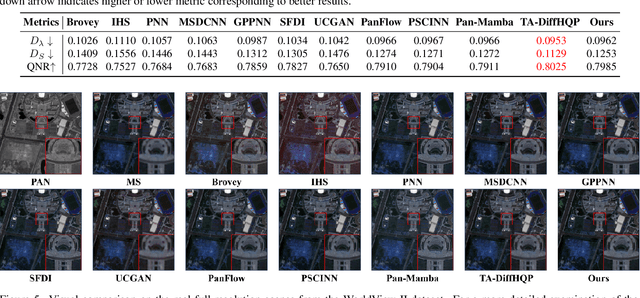
Recently, deep learning-based pan-sharpening algorithms have achieved notable advancements over traditional methods. However, many deep learning-based approaches incur substantial computational overhead during inference, especially with high-resolution images. This excessive computational demand limits the applicability of these methods in real-world scenarios, particularly in the absence of dedicated computing devices such as GPUs and TPUs. To address these challenges, we propose Pan-LUT, a novel learnable look-up table (LUT) framework for pan-sharpening that strikes a balance between performance and computational efficiency for high-resolution remote sensing images. To finely control the spectral transformation, we devise the PAN-guided look-up table (PGLUT) for channel-wise spectral mapping. To effectively capture fine-grained spatial details and adaptively learn local contexts, we introduce the spatial details look-up table (SDLUT) and adaptive aggregation look-up table (AALUT). Our proposed method contains fewer than 300K parameters and processes a 8K resolution image in under 1 ms using a single NVIDIA GeForce RTX 2080 Ti GPU, demonstrating significantly faster performance compared to other methods. Experiments reveal that Pan-LUT efficiently processes large remote sensing images in a lightweight manner, bridging the gap to real-world applications. Furthermore, our model surpasses SOTA methods in full-resolution scenes under real-world conditions, highlighting its effectiveness and efficiency.
Unsupervised Low-light Image Enhancement with Lookup Tables and Diffusion Priors
Sep 27, 2024Low-light image enhancement (LIE) aims at precisely and efficiently recovering an image degraded in poor illumination environments. Recent advanced LIE techniques are using deep neural networks, which require lots of low-normal light image pairs, network parameters, and computational resources. As a result, their practicality is limited. In this work, we devise a novel unsupervised LIE framework based on diffusion priors and lookup tables (DPLUT) to achieve efficient low-light image recovery. The proposed approach comprises two critical components: a light adjustment lookup table (LLUT) and a noise suppression lookup table (NLUT). LLUT is optimized with a set of unsupervised losses. It aims at predicting pixel-wise curve parameters for the dynamic range adjustment of a specific image. NLUT is designed to remove the amplified noise after the light brightens. As diffusion models are sensitive to noise, diffusion priors are introduced to achieve high-performance noise suppression. Extensive experiments demonstrate that our approach outperforms state-of-the-art methods in terms of visual quality and efficiency.
AGLLDiff: Guiding Diffusion Models Towards Unsupervised Training-free Real-world Low-light Image Enhancement
Jul 23, 2024



Existing low-light image enhancement (LIE) methods have achieved noteworthy success in solving synthetic distortions, yet they often fall short in practical applications. The limitations arise from two inherent challenges in real-world LIE: 1) the collection of distorted/clean image pairs is often impractical and sometimes even unavailable, and 2) accurately modeling complex degradations presents a non-trivial problem. To overcome them, we propose the Attribute Guidance Diffusion framework (AGLLDiff), a training-free method for effective real-world LIE. Instead of specifically defining the degradation process, AGLLDiff shifts the paradigm and models the desired attributes, such as image exposure, structure and color of normal-light images. These attributes are readily available and impose no assumptions about the degradation process, which guides the diffusion sampling process to a reliable high-quality solution space. Extensive experiments demonstrate that our approach outperforms the current leading unsupervised LIE methods across benchmarks in terms of distortion-based and perceptual-based metrics, and it performs well even in sophisticated wild degradation.