 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Pedestrian Head Tracking: A Benchmark Dataset and an Information Fusion Network
Aug 12, 2024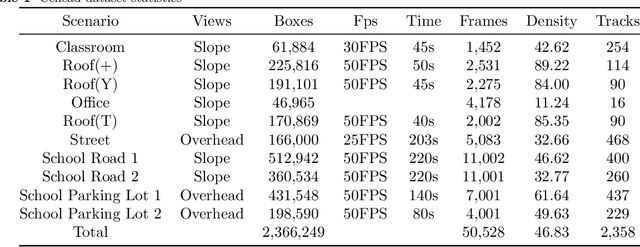

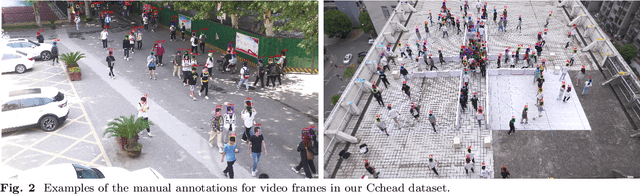
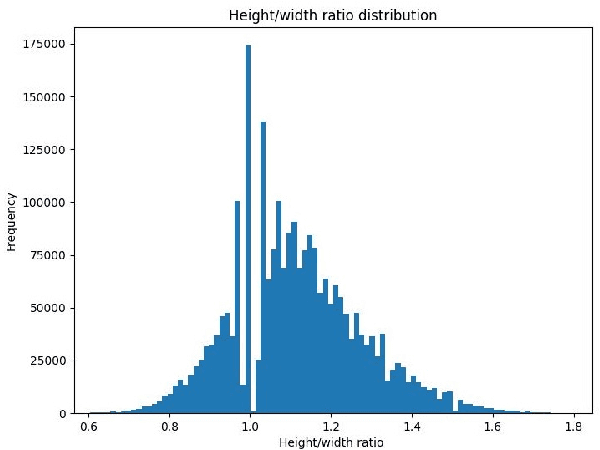
Pedestrian detection and tracking in crowded video sequences have a wide range of applications, including autonomous driving, robot navigation and pedestrian flow surveillance. However, detecting and tracking pedestrians in high-density crowds face many challenges, including intra-class occlusions, complex motions, and diverse poses. Although deep learning models have achieved remarkable progress in head detection, head tracking datasets and methods are extremely lacking. Existing head datasets have limited coverage of complex pedestrian flows and scenes (e.g., pedestrian interactions, occlusions, and object interference). It is of great importance to develop new head tracking datasets and methods. To address these challenges, we present a Chinese Large-scale Cross-scene Pedestrian Head Tracking dataset (Cchead) and a Multi-Source Information Fusion Network (MIFN). Our dataset has features that are of considerable interest, including 10 diverse scenes of 50,528 frames with over 2,366,249 heads and 2,358 tracks annotated. Our dataset contains diverse human moving speeds, directions, and complex crowd pedestrian flows with collision avoidance behaviors. We provide a comprehensive analysis and comparison with existing state-of-the-art (SOTA) algorithms. Moreover, our MIFN is the first end-to-end CNN-based head detection and tracking network that jointly trains RGB frames, pixel-level motion information (optical flow and frame difference maps), depth maps, and density maps in videos. Compared with SOTA pedestrian detection and tracking methods, MIFN achieves superior performance on our Cchead dataset. We believe our datasets and baseline will become valuable resources towards developing pedestrian tracking in dense crowds.
Probabilistic Risk Assessment for Chance-Constrained Collision Avoidance in Uncertain Dynamic Environments
Feb 21, 2023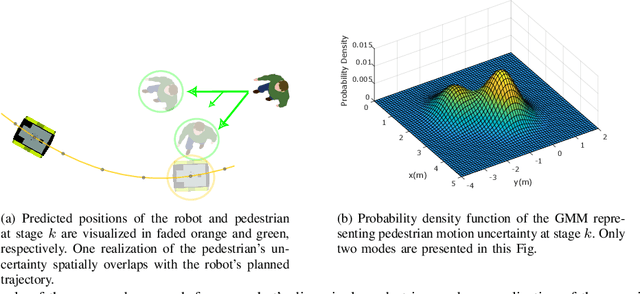
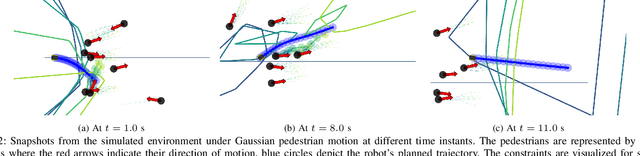

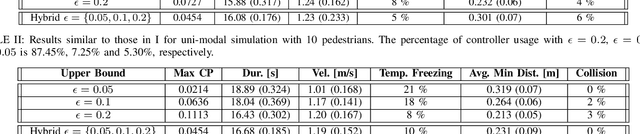
Balancing safety and efficiency when planning in crowded scenarios with uncertain dynamics is challenging where it is imperative to accomplish the robot's mission without incurring any safety violations. Typically, chance constraints are incorporated into the planning problem to provide probabilistic safety guarantees by imposing an upper bound on the collision probability of the planned trajectory. Yet, this results in overly conservative behavior on the grounds that the gap between the obtained risk and the specified upper limit is not explicitly restricted. To address this issue, we propose a real-time capable approach to quantify the risk associated with planned trajectories obtained from multiple probabilistic planners, running in parallel, with different upper bounds of the acceptable risk level. Based on the evaluated risk, the least conservative plan is selected provided that its associated risk is below a specified threshold. In such a way, the proposed approach provides probabilistic safety guarantees by attaining a closer bound to the specified risk, while being applicable to generic uncertainties of moving obstacles. We demonstrate the efficiency of our proposed approach, by improving the performance of a state-of-the-art probabilistic planner, in simulations and experiments using a mobile robot in an environment shared with humans.
Reachability-Based Confidence-Aware Probabilistic Collision Detection in Highway Driving
Feb 14, 2023



Risk assessment is a crucial component of collision warning and avoidance systems in intelligent vehicles. To accurately detect potential vehicle collisions, reachability-based formal approaches have been developed to ensure driving safety, but suffer from over-conservatism, potentially leading to false-positive risk events in complicated real-world applications. In this work, we combine two reachability analysis techniques, i.e., backward reachable set (BRS) and stochastic forward reachable set (FRS), and propose an integrated probabilistic collision detection framework in highway driving. Within the framework, we can firstly use a BRS to formally check whether a two-vehicle interaction is safe; otherwise, a prediction-based stochastic FRS is employed to estimate a collision probability at each future time step. In doing so, the framework can not only identify non-risky events with guaranteed safety, but also provide accurate collision risk estimation in safety-critical events. To construct the stochastic FRS, we develop a neural network-based acceleration model for surrounding vehicles, and further incorporate confidence-aware dynamic belief to improve the prediction accuracy. Extensive experiments are conducted to validate the performance of the acceleration prediction model based on naturalistic highway driving data, and the efficiency and effectiveness of the framework with the infused confidence belief are tested both in naturalistic and simulated highway scenarios. The proposed risk assessment framework is promising in real-world applications.
Continual Interactive Behavior Learning With Traffic Divergence Measurement: A Dynamic Gradient Scenario Memory Approach
Dec 21, 2022



Developing autonomous vehicles (AVs) helps improve the road safety and traffic efficiency of intelligent transportation systems (ITS). Accurately predicting the trajectories of traffic participants is essential to the decision-making and motion planning of AVs in interactive scenarios. Recently, learning-based trajectory predictors have shown state-of-the-art performance in highway or urban areas. However, most existing learning-based models trained with fixed datasets may perform poorly in continuously changing scenarios. Specifically, they may not perform well in learned scenarios after learning the new one. This phenomenon is called "catastrophic forgetting". Few studies investigate trajectory predictions in continuous scenarios, where catastrophic forgetting may happen. To handle this problem, first, a novel continual learning (CL) approach for vehicle trajectory prediction is proposed in this paper. Then, inspired by brain science, a dynamic memory mechanism is developed by utilizing the measurement of traffic divergence between scenarios, which balances the performance and training efficiency of the proposed CL approach. Finally, datasets collected from different locations are used to design continual training and testing methods in experiments. Experimental results show that the proposed approach achieves consistently high prediction accuracy in continuous scenarios without re-training, which mitigates catastrophic forgetting compared to non-CL approaches. The implementation of the proposed approach is publicly available at https://github.com/BIT-Jack/D-GSM
Large region targets observation scheduling by multiple satellites using resampling particle swarm optimization
Jun 21, 2022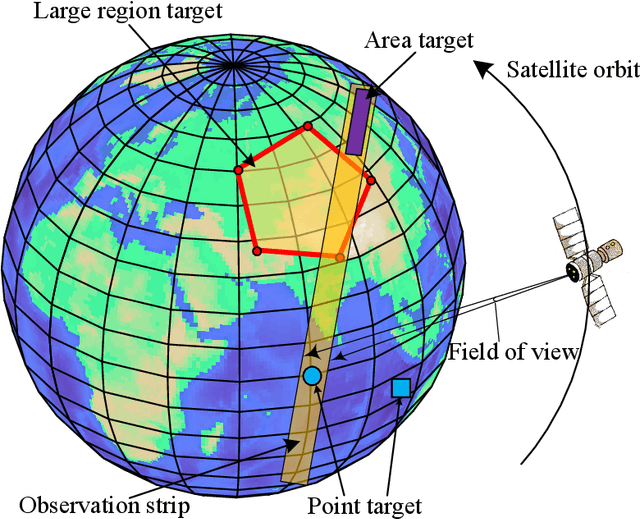
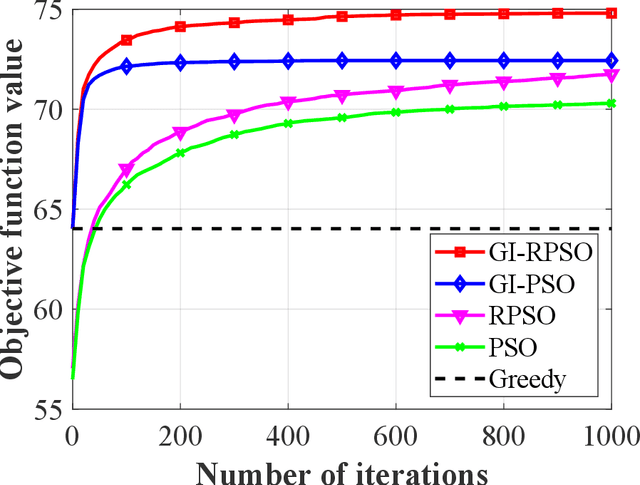
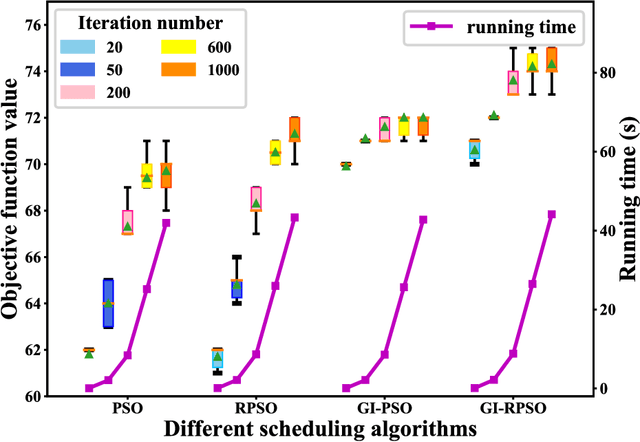
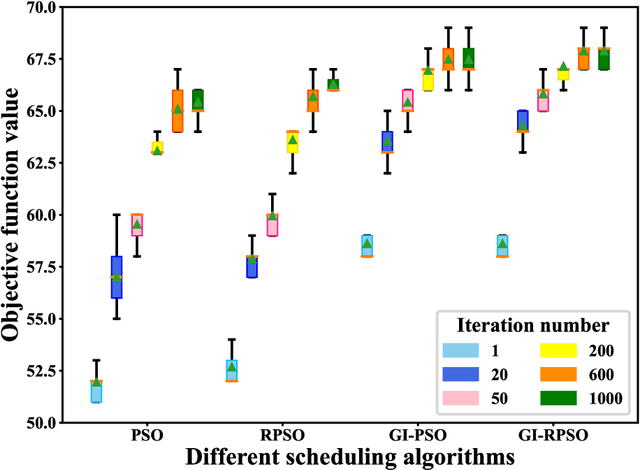
The last decades have witnessed a rapid increase of Earth observation satellites (EOSs), leading to the increasing complexity of EOSs scheduling. On account of the widespread applications of large region observation, this paper aims to address the EOSs observation scheduling problem for large region targets. A rapid coverage calculation method employing a projection reference plane and a polygon clipping technique is first developed. We then formulate a nonlinear integer programming model for the scheduling problem, where the objective function is calculated based on the developed coverage calculation method. A greedy initialization-based resampling particle swarm optimization (GI-RPSO) algorithm is proposed to solve the model. The adopted greedy initialization strategy and particle resampling method contribute to generating efficient and effective solutions during the evolution process. In the end, extensive experiments are conducted to illustrate the effectiveness and reliability of the proposed method. Compared to the traditional particle swarm optimization and the widely used greedy algorithm, the proposed GI-RPSO can improve the scheduling result by 5.42% and 15.86%, respectively.
Prediction-Based Reachability Analysis for Collision Risk Assessment on Highways
May 03, 2022



Real-time safety systems are crucial components of intelligent vehicles. This paper introduces a prediction-based collision risk assessment approach on highways. Given a point mass vehicle dynamics system, a stochastic forward reachable set considering two-dimensional motion with vehicle state probability distributions is firstly established. We then develop an acceleration prediction model, which provides multi-modal probabilistic acceleration distributions to propagate vehicle states. The collision probability is calculated by summing up the probabilities of the states where two vehicles spatially overlap. Simulation results show that the prediction model has superior performance in terms of vehicle motion position errors, and the proposed collision detection approach is agile and effective to identify the collision in cut-in crash events.
An Ensemble Learning Framework for Vehicle Trajectory Prediction in Interactive Scenarios
Feb 22, 2022


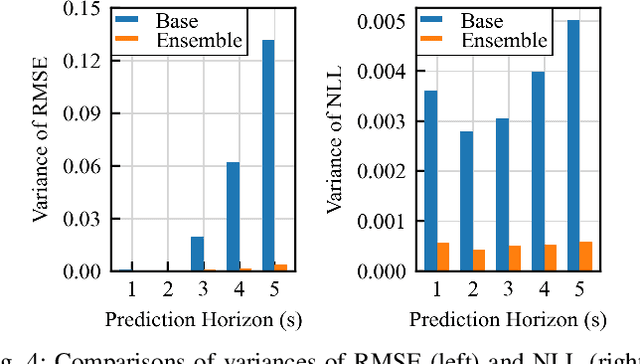
Precisely modeling interactions and accurately predicting trajectories of surrounding vehicles are essential to the decision-making and path-planning of intelligent vehicles. This paper proposes a novel framework based on ensemble learning to improve the performance of trajectory predictions in interactive scenarios. The framework is termed Interactive Ensemble Trajectory Predictor (IETP). IETP assembles interaction-aware trajectory predictors as base learners to build an ensemble learner. Firstly, each base learner in IETP observes historical trajectories of vehicles in the scene. Then each base learner handles interactions between vehicles to predict trajectories. Finally, an ensemble learner is built to predict trajectories by applying two ensemble strategies on the predictions from all base learners. Predictions generated by the ensemble learner are final outputs of IETP. In this study, three experiments using different data are conducted based on the NGSIM dataset. Experimental results show that IETP improves the predicting accuracy and decreases the variance of errors compared to base learners. In addition, IETP exceeds baseline models with 50% of the training data, indicating that IETP is data-efficient. Moreover, the implementation of IETP is publicly available at https://github.com/BIT-Jack/IETP.
Simulated annealing based heuristic for multiple agile satellites scheduling under cloud coverage uncertainty
Mar 14, 2020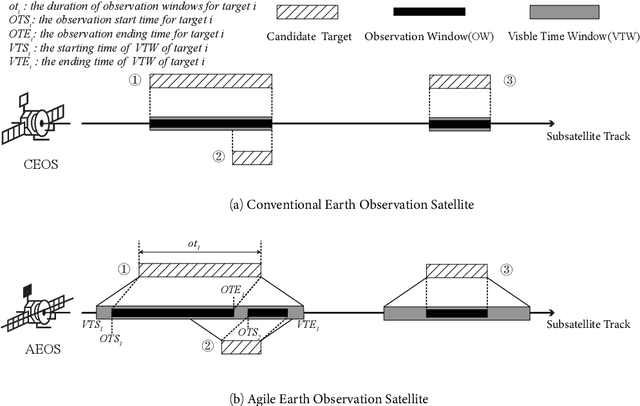
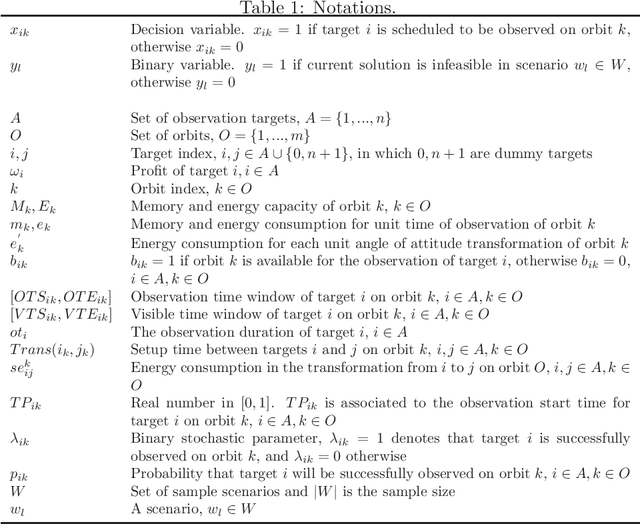

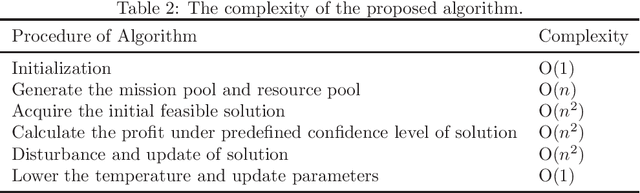
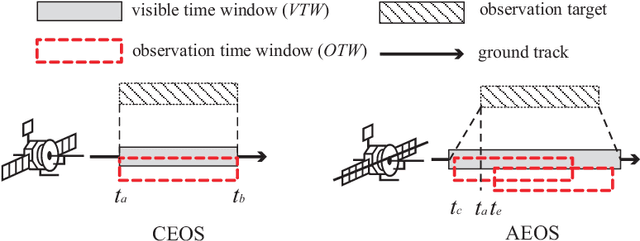
Agile satellites are the new generation of Earth observation satellites (EOSs) with stronger attitude maneuvering capability. Since optical remote sensing instruments equipped on satellites cannot see through the cloud, the cloud coverage has a significant influence on the satellite observation missions. We are the first to address multiple agile EOSs scheduling problem under cloud coverage uncertainty where the objective aims to maximize the entire observation profit. The chance constraint programming model is adopted to describe the uncertainty initially, and the observation profit under cloud coverage uncertainty is then calculated via sample approximation method. Subsequently, an improved simulated annealing based heuristic combining a fast insertion strategy is proposed for large-scale observation missions. The experimental results show that the improved simulated annealing heuristic outperforms other algorithms for the multiple AEOSs scheduling problem under cloud coverage uncertainty, which verifies the efficiency and effectiveness of the proposed algorithm.
Agile Earth observation satellite scheduling over 20 years: formulations, methods and future directions
Mar 13, 2020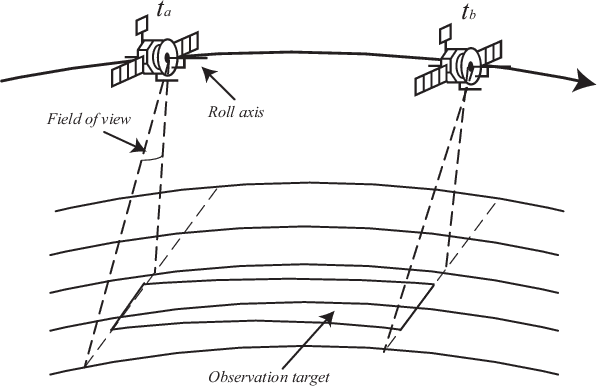

Agile satellites with advanced attitude maneuvering capability are the new generation of Earth observation satellites (EOSs). The continuous improvement in satellite technology and decrease in launch cost have boosted the development of agile EOSs (AEOSs). To efficiently employ the increasing orbiting AEOSs, the AEOS scheduling problem (AEOSSP) aiming to maximize the entire observation profit while satisfying all complex operational constraints, has received much attention over the past 20 years. The objectives of this paper are thus to summarize current research on AEOSSP, identify main accomplishments and highlight potential future research directions. To this end, general definitions of AEOSSP with operational constraints are described initially, followed by its three typical variations including different definitions of observation profit, multi-objective function and autonomous model. A detailed literature review from 1997 up to 2019 is then presented in line with four different solution methods, i.e., exact method, heuristic, metaheuristic and machine learning. Finally, we discuss a number of topics worth pursuing in the future.