 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredictability Awareness for Efficient and Robust Multi-Agent Coordination
Nov 09, 2024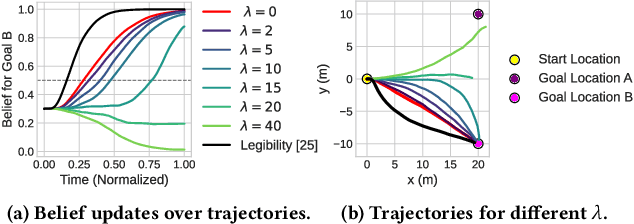
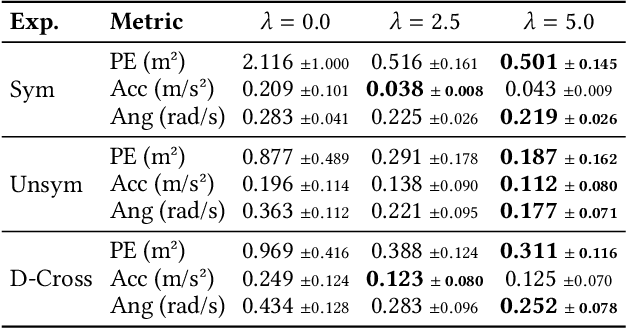
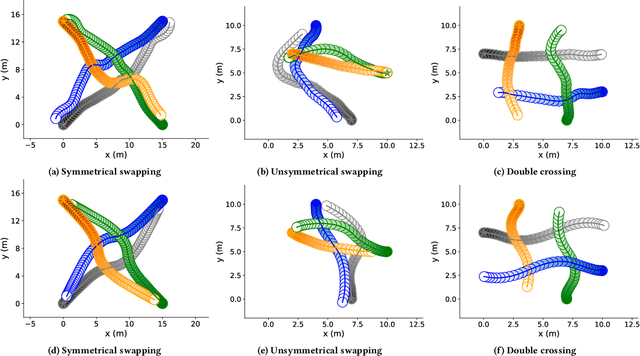
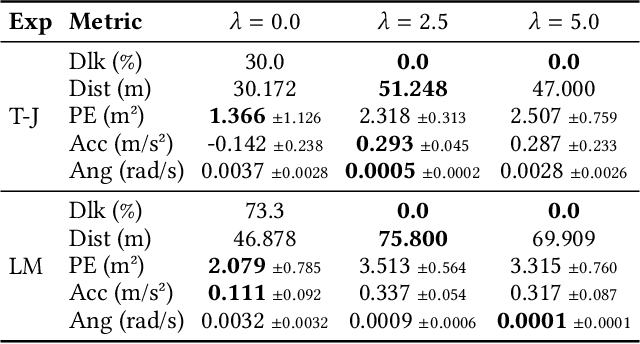
To safely and efficiently solve motion planning problems in multi-agent settings, most approaches attempt to solve a joint optimization that explicitly accounts for the responses triggered in other agents. This often results in solutions with an exponential computational complexity, making these methods intractable for complex scenarios with many agents. While sequential predict-and-plan approaches are more scalable, they tend to perform poorly in highly interactive environments. This paper proposes a method to improve the interactive capabilities of sequential predict-and-plan methods in multi-agent navigation problems by introducing predictability as an optimization objective. We interpret predictability through the use of general prediction models, by allowing agents to predict themselves and estimate how they align with these external predictions. We formally introduce this behavior through the free-energy of the system, which reduces under appropriate bounds to the Kullback-Leibler divergence between plan and prediction, and use this as a penalty for unpredictable trajectories.The proposed interpretation of predictability allows agents to more robustly leverage prediction models, and fosters a soft social convention that accelerates agreement on coordination strategies without the need of explicit high level control or communication. We show how this predictability-aware planning leads to lower-cost trajectories and reduces planning effort in a set of multi-robot problems, including autonomous driving experiments with human driver data, where we show that the benefits of considering predictability apply even when only the ego-agent uses this strategy.
RACP: Risk-Aware Contingency Planning with Multi-Modal Predictions
Feb 27, 2024



For an autonomous vehicle to operate reliably within real-world traffic scenarios, it is imperative to assess the repercussions of its prospective actions by anticipating the uncertain intentions exhibited by other participants in the traffic environment. Driven by the pronounced multi-modal nature of human driving behavior, this paper presents an approach that leverages Bayesian beliefs over the distribution of potential policies of other road users to construct a novel risk-aware probabilistic motion planning framework. In particular, we propose a novel contingency planner that outputs long-term contingent plans conditioned on multiple possible intents for other actors in the traffic scene. The Bayesian belief is incorporated into the optimization cost function to influence the behavior of the short-term plan based on the likelihood of other agents' policies. Furthermore, a probabilistic risk metric is employed to fine-tune the balance between efficiency and robustness. Through a series of closed-loop safety-critical simulated traffic scenarios shared with human-driven vehicles, we demonstrate the practical efficacy of our proposed approach that can handle multi-vehicle scenarios.
Probabilistic Risk Assessment for Chance-Constrained Collision Avoidance in Uncertain Dynamic Environments
Feb 21, 2023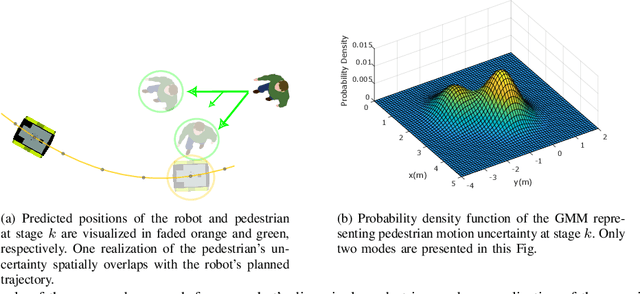
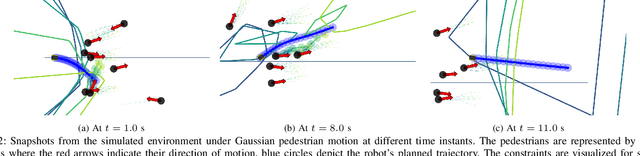

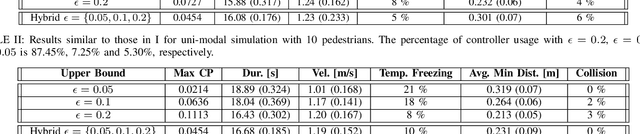
Balancing safety and efficiency when planning in crowded scenarios with uncertain dynamics is challenging where it is imperative to accomplish the robot's mission without incurring any safety violations. Typically, chance constraints are incorporated into the planning problem to provide probabilistic safety guarantees by imposing an upper bound on the collision probability of the planned trajectory. Yet, this results in overly conservative behavior on the grounds that the gap between the obtained risk and the specified upper limit is not explicitly restricted. To address this issue, we propose a real-time capable approach to quantify the risk associated with planned trajectories obtained from multiple probabilistic planners, running in parallel, with different upper bounds of the acceptable risk level. Based on the evaluated risk, the least conservative plan is selected provided that its associated risk is below a specified threshold. In such a way, the proposed approach provides probabilistic safety guarantees by attaining a closer bound to the specified risk, while being applicable to generic uncertainties of moving obstacles. We demonstrate the efficiency of our proposed approach, by improving the performance of a state-of-the-art probabilistic planner, in simulations and experiments using a mobile robot in an environment shared with humans.