 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn MLCommons Scientific Benchmarks Ontology
Nov 06, 2025



Scientific machine learning research spans diverse domains and data modalities, yet existing benchmark efforts remain siloed and lack standardization. This makes novel and transformative applications of machine learning to critical scientific use-cases more fragmented and less clear in pathways to impact. This paper introduces an ontology for scientific benchmarking developed through a unified, community-driven effort that extends the MLCommons ecosystem to cover physics, chemistry, materials science, biology, climate science, and more. Building on prior initiatives such as XAI-BENCH, FastML Science Benchmarks, PDEBench, and the SciMLBench framework, our effort consolidates a large set of disparate benchmarks and frameworks into a single taxonomy of scientific, application, and system-level benchmarks. New benchmarks can be added through an open submission workflow coordinated by the MLCommons Science Working Group and evaluated against a six-category rating rubric that promotes and identifies high-quality benchmarks, enabling stakeholders to select benchmarks that meet their specific needs. The architecture is extensible, supporting future scientific and AI/ML motifs, and we discuss methods for identifying emerging computing patterns for unique scientific workloads. The MLCommons Science Benchmarks Ontology provides a standardized, scalable foundation for reproducible, cross-domain benchmarking in scientific machine learning. A companion webpage for this work has also been developed as the effort evolves: https://mlcommons-science.github.io/benchmark/
Duawlfin: A Drone with Unified Actuation for Wheeled Locomotion and Flight Operation
May 20, 2025This paper presents Duawlfin, a drone with unified actuation for wheeled locomotion and flight operation that achieves efficient, bidirectional ground mobility. Unlike existing hybrid designs, Duawlfin eliminates the need for additional actuators or propeller-driven ground propulsion by leveraging only its standard quadrotor motors and introducing a differential drivetrain with one-way bearings. This innovation simplifies the mechanical system, significantly reduces energy usage, and prevents the disturbance caused by propellers spinning near the ground, such as dust interference with sensors. Besides, the one-way bearings minimize the power transfer from motors to propellers in the ground mode, which enables the vehicle to operate safely near humans. We provide a detailed mechanical design, present control strategies for rapid and smooth mode transitions, and validate the concept through extensive experimental testing. Flight-mode tests confirm stable aerial performance comparable to conventional quadcopters, while ground-mode experiments demonstrate efficient slope climbing (up to 30{\deg}) and agile turning maneuvers approaching 1g lateral acceleration. The seamless transitions between aerial and ground modes further underscore the practicality and effectiveness of our approach for applications like urban logistics and indoor navigation. All the materials including 3-D model files, demonstration video and other assets are open-sourced at https://sites.google.com/view/Duawlfin.
Embodied-Reasoner: Synergizing Visual Search, Reasoning, and Action for Embodied Interactive Tasks
Mar 27, 2025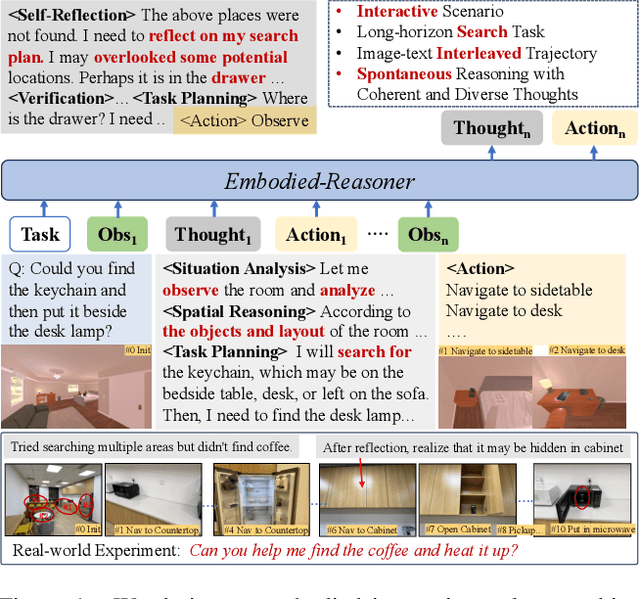
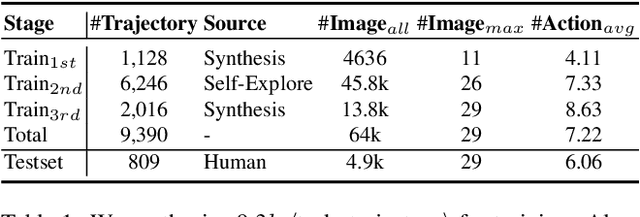
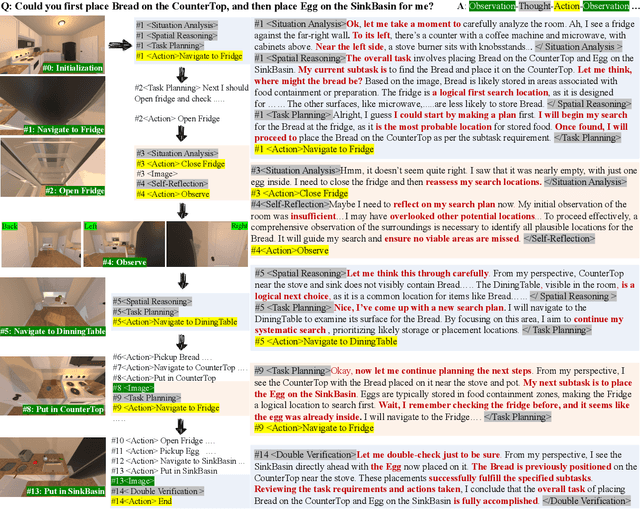
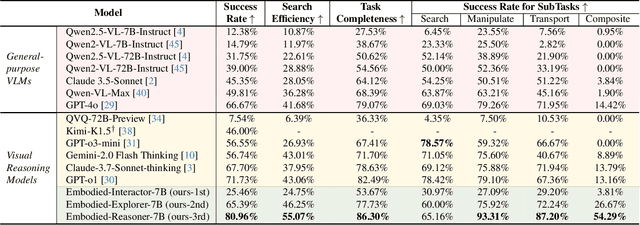
Recent advances in deep thinking models have demonstrated remarkable reasoning capabilities on mathematical and coding tasks. However, their effectiveness in embodied domains which require continuous interaction with environments through image action interleaved trajectories remains largely -unexplored. We present Embodied Reasoner, a model that extends o1 style reasoning to interactive embodied search tasks. Unlike mathematical reasoning that relies primarily on logical deduction, embodied scenarios demand spatial understanding, temporal reasoning, and ongoing self-reflection based on interaction history. To address these challenges, we synthesize 9.3k coherent Observation-Thought-Action trajectories containing 64k interactive images and 90k diverse thinking processes (analysis, spatial reasoning, reflection, planning, and verification). We develop a three-stage training pipeline that progressively enhances the model's capabilities through imitation learning, self-exploration via rejection sampling, and self-correction through reflection tuning. The evaluation shows that our model significantly outperforms those advanced visual reasoning models, e.g., it exceeds OpenAI o1, o3-mini, and Claude-3.7 by +9\%, 24\%, and +13\%. Analysis reveals our model exhibits fewer repeated searches and logical inconsistencies, with particular advantages in complex long-horizon tasks. Real-world environments also show our superiority while exhibiting fewer repeated searches and logical inconsistency cases.
Finite Element Modeling of Surface Traveling Wave Friction Driven for Rotary Ultrasonic Motor
Sep 16, 2024



Finite element modeling (FEM) is a critical tool in the design and analysis of piezoelectric devices, offering detailed numerical simulations that guide various applications. While traditionally applied to eigenfrequency analysis and time-dependent studies for predicting excitation eigenfrequencies and estimating traveling wave amplitudes, FEM's potential extends to more sophisticated tasks. Advanced FEM applications, such as modeling friction-driven dynamic motion and reaction forces, are essential for accurately simulating the complex behaviors of piezoelectric actuators under real-world conditions. This paper presents a comprehensive motor model that encompasses the coupling dynamics between the stator and rotor in a piezoelectric ultrasonic motor (USM). Utilizing contact theory, the model simulates the complex conditions encountered during the USM's initial start-up phase and its transition to steady-state operation. Implemented in COMSOL Multiphysics, the model provides an in-depth analysis of a rotary piezoelectric actuator, capturing the dynamic interactions and reaction forces that influence its performance. The introduction of this FEM-based model represents a significant advancement in the simulation and understanding of piezoelectric actuators. By offering a more complete picture of the motor's behavior from start-up to steady state, this study enables more accurate control and optimization of piezoelectric devices, enhancing their efficiency and reliability in practical applications.
A Preliminary Add-on Differential Drive System for MRI-Compatible Prostate Robotic System
Sep 16, 2024
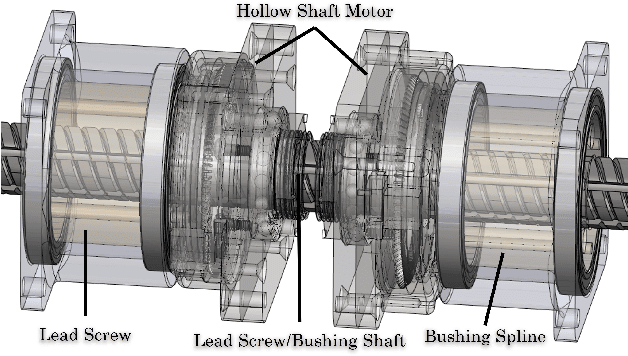
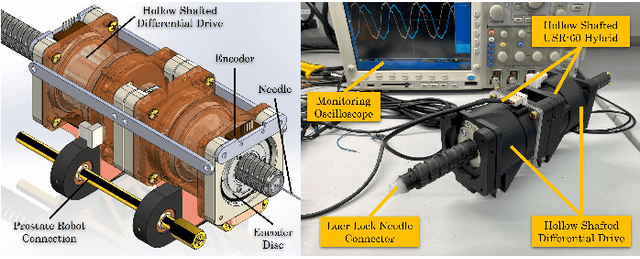

MRI-targeted biopsy has shown significant advantages over conventional random sextant biopsy, detecting more clinically significant cancers and improving risk stratification. However, needle targeting accuracy, especially in transperineal MRI-guided biopsies, presents a challenge due to needle deflection. This can negatively impact patient outcomes, leading to repeated sampling and inaccurate diagnoses if cancerous tissue isn't properly collected. To address this, we developed a novel differential drive prototype designed to improve needle control and targeting precision. This system, featuring a 2-degree-of-freedom (2-DOF) MRI-compatible cooperative needle driver, distances the robot from the MRI imaging area, minimizing image artifacts and distortions. By using two motors for simultaneous needle insertion and rotation without relative movement, the design reduces MRI interference. In this work, we introduced two mechanical differential drive designs: the ball screw/spline and lead screw/bushing types, and explored both hollow-type and side-pulley differentials. Validation through low-resolution rapid-prototyping demonstrated the feasibility of differential drives in prostate biopsies, with the custom hollow-type hybrid ultrasonic motor (USM) achieving a rotary speed of 75 rpm. The side-pulley differential further increased the speed to 168 rpm, ideal for needle rotation applications. Accuracy assessments showed minimal errors in both insertion and rotation motions, indicating that this proof-of-concept design holds great promise for further development. Ultimately, the differential drive offers a promising solution to the critical issue of needle targeting accuracy in MRI-guided prostate biopsies.
Multimodal Large Language Model Driven Scenario Testing for Autonomous Vehicles
Sep 10, 2024The generation of corner cases has become increasingly crucial for efficiently testing autonomous vehicles prior to road deployment. However, existing methods struggle to accommodate diverse testing requirements and often lack the ability to generalize to unseen situations, thereby reducing the convenience and usability of the generated scenarios. A method that facilitates easily controllable scenario generation for efficient autonomous vehicles (AV) testing with realistic and challenging situations is greatly needed. To address this, we proposed OmniTester: a multimodal Large Language Model (LLM) based framework that fully leverages the extensive world knowledge and reasoning capabilities of LLMs. OmniTester is designed to generate realistic and diverse scenarios within a simulation environment, offering a robust solution for testing and evaluating AVs. In addition to prompt engineering, we employ tools from Simulation of Urban Mobility to simplify the complexity of codes generated by LLMs. Furthermore, we incorporate Retrieval-Augmented Generation and a self-improvement mechanism to enhance the LLM's understanding of scenarios, thereby increasing its ability to produce more realistic scenes. In the experiments, we demonstrated the controllability and realism of our approaches in generating three types of challenging and complex scenarios. Additionally, we showcased its effectiveness in reconstructing new scenarios described in crash report, driven by the generalization capability of LLMs.
Development of Advanced FEM Simulation Technology for Pre-Operative Surgical Planning
Sep 09, 2024



Intracorporeal needle-based therapeutic ultrasound (NBTU) offers a minimally invasive approach for the thermal ablation of malignant brain tumors, including both primary and metastatic cancers. NBTU utilizes a high-frequency alternating electric field to excite a piezoelectric transducer, generating acoustic waves that cause localized heating and tumor cell ablation, and it provides a more precise ablation by delivering lower acoustic power doses directly to targeted tumors while sparing surrounding healthy tissue. Building on our previous work, this study introduces a database for optimizing pre-operative surgical planning by simulating ablation effects in varied tissue environments and develops an extended simulation model incorporating various tumor types and sizes to evaluate thermal damage under trans-tissue conditions. A comprehensive database is created from these simulations, detailing critical parameters such as CEM43 isodose maps, temperature changes, thermal dose areas, and maximum ablation distances for four directional probes. This database serves as a valuable resource for future studies, aiding in complex trajectory planning and parameter optimization for NBTU procedures. Moreover, a novel probe selection method is proposed to enhance pre-surgical planning, providing a strategic approach to selecting probes that maximize therapeutic efficiency and minimize ablation time. By avoiding unnecessary thermal propagation and optimizing probe angles, this method has the potential to improve patient outcomes and streamline surgical procedures. Overall, the findings of this study contribute significantly to the field of NBTU, offering a robust framework for enhancing treatment precision and efficacy in clinical settings.
Deep Brain Ultrasound Ablation Thermal Dose Modeling with in Vivo Experimental Validation
Sep 04, 2024


Intracorporeal needle-based therapeutic ultrasound (NBTU) is a minimally invasive option for intervening in malignant brain tumors, commonly used in thermal ablation procedures. This technique is suitable for both primary and metastatic cancers, utilizing a high-frequency alternating electric field (up to 10 MHz) to excite a piezoelectric transducer. The resulting rapid deformation of the transducer produces an acoustic wave that propagates through tissue, leading to localized high-temperature heating at the target tumor site and inducing rapid cell death. To optimize the design of NBTU transducers for thermal dose delivery during treatment, numerical modeling of the acoustic pressure field generated by the deforming piezoelectric transducer is frequently employed. The bioheat transfer process generated by the input pressure field is used to track the thermal propagation of the applicator over time. Magnetic resonance thermal imaging (MRTI) can be used to experimentally validate these models. Validation results using MRTI demonstrated the feasibility of this model, showing a consistent thermal propagation pattern. However, a thermal damage isodose map is more advantageous for evaluating therapeutic efficacy. To achieve a more accurate simulation based on the actual brain tissue environment, a new finite element method (FEM) simulation with enhanced damage evaluation capabilities was conducted. The results showed that the highest temperature and ablated volume differed between experimental and simulation results by 2.1884{\deg}C (3.71%) and 0.0631 cm$^3$ (5.74%), respectively. The lowest Pearson correlation coefficient (PCC) for peak temperature was 0.7117, and the lowest Dice coefficient for the ablated area was 0.7021, indicating a good agreement in accuracy between simulation and experiment.
Suturing Tasks Automation Based on Skills Learned From Demonstrations: A Simulation Study
Mar 01, 2024In this work, we develop an open-source surgical simulation environment that includes a realistic model obtained by MRI-scanning a physical phantom, for the purpose of training and evaluating a Learning from Demonstration (LfD) algorithm for autonomous suturing. The LfD algorithm utilizes Dynamic Movement Primitives (DMP) and Locally Weighted Regression (LWR), but focuses on the needle trajectory, rather than the instruments, to obtain better generality with respect to needle grasps. We conduct a user study to collect multiple suturing demonstrations and perform a comprehensive analysis of the ability of the LfD algorithm to generalize from a demonstration at one location in one phantom to different locations in the same phantom and to a different phantom. Our results indicate good generalization, on the order of 91.5%, when learning from more experienced subjects, indicating the need to integrate skill assessment in the future.
CookDial: A dataset for task-oriented dialogs grounded in procedural documents
Jun 17, 2022This work presents a new dialog dataset, CookDial, that facilitates research on task-oriented dialog systems with procedural knowledge understanding. The corpus contains 260 human-to-human task-oriented dialogs in which an agent, given a recipe document, guides the user to cook a dish. Dialogs in CookDial exhibit two unique features: (i) procedural alignment between the dialog flow and supporting document; (ii) complex agent decision-making that involves segmenting long sentences, paraphrasing hard instructions and resolving coreference in the dialog context. In addition, we identify three challenging (sub)tasks in the assumed task-oriented dialog system: (1) User Question Understanding, (2) Agent Action Frame Prediction, and (3) Agent Response Generation. For each of these tasks, we develop a neural baseline model, which we evaluate on the CookDial dataset. We publicly release the CookDial dataset, comprising rich annotations of both dialogs and recipe documents, to stimulate further research on domain-specific document-grounded dialog systems.
* The dataset and codes are available at https://github.com/YiweiJiang2015/CookDial