 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinite Element Modeling of Surface Traveling Wave Friction Driven for Rotary Ultrasonic Motor
Sep 16, 2024



Finite element modeling (FEM) is a critical tool in the design and analysis of piezoelectric devices, offering detailed numerical simulations that guide various applications. While traditionally applied to eigenfrequency analysis and time-dependent studies for predicting excitation eigenfrequencies and estimating traveling wave amplitudes, FEM's potential extends to more sophisticated tasks. Advanced FEM applications, such as modeling friction-driven dynamic motion and reaction forces, are essential for accurately simulating the complex behaviors of piezoelectric actuators under real-world conditions. This paper presents a comprehensive motor model that encompasses the coupling dynamics between the stator and rotor in a piezoelectric ultrasonic motor (USM). Utilizing contact theory, the model simulates the complex conditions encountered during the USM's initial start-up phase and its transition to steady-state operation. Implemented in COMSOL Multiphysics, the model provides an in-depth analysis of a rotary piezoelectric actuator, capturing the dynamic interactions and reaction forces that influence its performance. The introduction of this FEM-based model represents a significant advancement in the simulation and understanding of piezoelectric actuators. By offering a more complete picture of the motor's behavior from start-up to steady state, this study enables more accurate control and optimization of piezoelectric devices, enhancing their efficiency and reliability in practical applications.
A Preliminary Add-on Differential Drive System for MRI-Compatible Prostate Robotic System
Sep 16, 2024
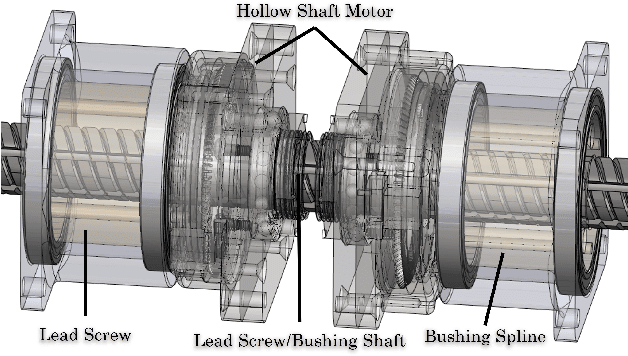
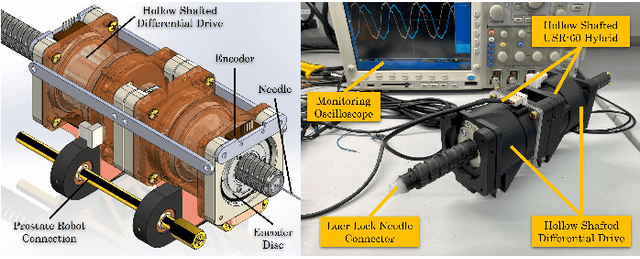

MRI-targeted biopsy has shown significant advantages over conventional random sextant biopsy, detecting more clinically significant cancers and improving risk stratification. However, needle targeting accuracy, especially in transperineal MRI-guided biopsies, presents a challenge due to needle deflection. This can negatively impact patient outcomes, leading to repeated sampling and inaccurate diagnoses if cancerous tissue isn't properly collected. To address this, we developed a novel differential drive prototype designed to improve needle control and targeting precision. This system, featuring a 2-degree-of-freedom (2-DOF) MRI-compatible cooperative needle driver, distances the robot from the MRI imaging area, minimizing image artifacts and distortions. By using two motors for simultaneous needle insertion and rotation without relative movement, the design reduces MRI interference. In this work, we introduced two mechanical differential drive designs: the ball screw/spline and lead screw/bushing types, and explored both hollow-type and side-pulley differentials. Validation through low-resolution rapid-prototyping demonstrated the feasibility of differential drives in prostate biopsies, with the custom hollow-type hybrid ultrasonic motor (USM) achieving a rotary speed of 75 rpm. The side-pulley differential further increased the speed to 168 rpm, ideal for needle rotation applications. Accuracy assessments showed minimal errors in both insertion and rotation motions, indicating that this proof-of-concept design holds great promise for further development. Ultimately, the differential drive offers a promising solution to the critical issue of needle targeting accuracy in MRI-guided prostate biopsies.
Characterization and Design of A Hollow Cylindrical Ultrasonic Motor
Sep 12, 2024Piezoelectric ultrasonic motors perform the advantages of compact design, faster reaction time, and simpler setup compared to other motion units such as pneumatic and hydraulic motors, especially its non-ferromagnetic property makes it a perfect match in MRI-compatible robotics systems compared to traditional DC motors. Hollow shaft motors address the advantages of being lightweight and comparable to solid shafts of the same diameter, low rotational inertia, high tolerance to rotational imbalance due to low weight, and tolerance to high temperature due to low specific mass. This article presents a prototype of a hollow cylindrical ultrasonic motor (HCM) to perform direct drive, eliminate mechanical non-linearity, and reduce the size and complexity of the actuator or end effector assembly. Two equivalent HCMs are presented in this work, and under 50g prepressure on the rotor, it performed 383.3333rpm rotation speed and 57.3504mNm torque output when applying 282$V_{pp}$ driving voltage.
Development of Advanced FEM Simulation Technology for Pre-Operative Surgical Planning
Sep 09, 2024



Intracorporeal needle-based therapeutic ultrasound (NBTU) offers a minimally invasive approach for the thermal ablation of malignant brain tumors, including both primary and metastatic cancers. NBTU utilizes a high-frequency alternating electric field to excite a piezoelectric transducer, generating acoustic waves that cause localized heating and tumor cell ablation, and it provides a more precise ablation by delivering lower acoustic power doses directly to targeted tumors while sparing surrounding healthy tissue. Building on our previous work, this study introduces a database for optimizing pre-operative surgical planning by simulating ablation effects in varied tissue environments and develops an extended simulation model incorporating various tumor types and sizes to evaluate thermal damage under trans-tissue conditions. A comprehensive database is created from these simulations, detailing critical parameters such as CEM43 isodose maps, temperature changes, thermal dose areas, and maximum ablation distances for four directional probes. This database serves as a valuable resource for future studies, aiding in complex trajectory planning and parameter optimization for NBTU procedures. Moreover, a novel probe selection method is proposed to enhance pre-surgical planning, providing a strategic approach to selecting probes that maximize therapeutic efficiency and minimize ablation time. By avoiding unnecessary thermal propagation and optimizing probe angles, this method has the potential to improve patient outcomes and streamline surgical procedures. Overall, the findings of this study contribute significantly to the field of NBTU, offering a robust framework for enhancing treatment precision and efficacy in clinical settings.
Design and Characterization of MRI-compatible Plastic Ultrasonic Motor
Sep 06, 2024


Precise surgical procedures may benefit from intra-operative image guidance using magnetic resonance imaging (MRI). However, the MRI's strong magnetic fields, fast switching gradients, and constrained space pose the need for an MR-guided robotic system to assist the surgeon. Piezoelectric actuators can be used in an MRI environment by utilizing the inverse piezoelectric effect for different application purposes. Piezoelectric ultrasonic motor (USM) is one type of MRI-compatible actuator that can actuate these robots with fast response times, compactness, and simple configuration. Although the piezoelectric motors are mostly made of nonferromagnetic material, the generation of eddy currents due to the MRI's gradient fields can lead to magnetic field distortions causing image artifacts. Motor vibrations due to interactions between the MRI's magnetic fields and those generated by the eddy currents can further degrade image quality by causing image artifacts. In this work, a plastic piezoelectric ultrasonic (USM) motor with more degree of MRI compatibility was developed and induced with preliminary optimization. Multiple parameters, namely teeth number, notch size, edge bevel or straight, and surface finish level parameters were used versus the prepressure for the experiment, and the results suggested that using 48 teeth, thin teeth notch with 0.39mm, beveled edge and a surface finish using grit number of approximate 1000 sandpaper performed a better output both in rotary speed and torque. Under this combination, the highest speed reached up to 436.6665rpm when the prepressure was low, and the highest torque reached up to 0.0348Nm when the prepressure was approximately 500g.